
















PLANIFICACION DE PROCESO
- 1. PLANIFICACION DE PROCESOS
- 2. La Planificación hace referencia a un conjunto políticas y mecanismos incorporados al sistema operativo que gobiernan el orden en que deben ser ejecutados los trabajos que deben cumplimentarse por el sistema operativo. El Objetivo de la planificación es optimizar el rendimiento del sistema. Nombraremos tres grandes grupos relacionado con la filosofía del sistema: Planificación en sistemas con un Procesador , Multiprocesador y Tiempo real; identificando en cada caso sus componentes, sus finalidades y funciones.
- 3. La planificación hace referencia a un conjunto de políticas y mecanismos incorporados al “SO” que gobiernan el orden en que se ejecutan los trabajos que deben ser completados por el sistema informático. Un planificador es un módulo del sistema operativo que selecciona el siguiente trabajo y el siguiente proceso que tomara el control sobre el procesador entre las medidas de rendimiento y los criterios de optimización mas habituales que los planificadores utilizan los siguientes criterios.
- 4. UTILIZACIÓN DEL PROCESADOR : La utilización del procesador es la fracción de tiempo durante la cual el procesador se encuentre activo ejecutando algún proceso, bien de usuario, bien del “SO”. Con esta interpretación, la utilización del procesador puede ser medida con la relativa facilidad que se ejecute cuando ningún otro proceso pueda hacerlo. Una alternativa es considerar únicamente la operación en modo usuario y por lo cual excluir el tiempo empleado para el “SO”.
- 5. PRODUCTIVIDAD: La productividad se refiere a la cantidad de trabajo completada por mitad de tiempo. Un modo de expresarla es definiéndola como el numero de trabajos de usuario ejecutados por una unidad de tiempo. Cuando mayor sea este numero, más trabajo aparentemente esta siendo ejecutado por el sistema.
- 6. La planificación del procesador se clasifica según la escala relativa de tiempo en que es realizada .
- 7. Se define como el tiempo que transcurre desde el momento en que un Programa es remitido hasta que es totalmente completado por el mismo. T R = T S + T E .
- 8. Es el tiempo que un proceso o trabajo consume a la espera de la asignación de algún recurso. Es un sistema con Multiprogramación.
- 9. Se define como tiempo que transcurre desde el momento en que se introduce el ultimo carácter de una orden que desencadena la ejecución de un programa. A menudo un proceso puede comenzar a producir alguna salida al usuario mientras continua procesando la respuesta. Entonces, esta es una mejor medida desde el punto de vista del usuario.
- 10. Determina qué nuevos programas son aceptados para ser procesados por el sistema, o sea determina el grado de multiprogramación. Una vez admitidos, se convierten en procesos que son agregados a la cola de Planificación a Corto Plazo. En algunos sistemas, son agregados a la cola de Planificación a Mediano Plazo, ya que los procesos creados recientemente comienzan en una condición de suspendidos. Relativamente, se ejecuta en forma poco frecuente.
- 11. la utilización de recursos al nivel deseado. Es importante conseguir una administración equilibrada para saber como conjugar procesos interactivos que tienen retardos especiales con procesos por lotes que son una simple de cola de calculo. Por ejemplo, cuando la utilización del microprocesador puede admitir mas trabajos, el planificador puede dar entrada al sistema a nuevos procesos y aumentar con ello la probabilidad de asignación de alguno de estos procesos al procesador. Por el contrario, cuando el tiempo para la utilización del procesador resulte alto y así se refleje en el deterioro en el tiempo de espera, el PLP puede optar por reducir la frecuencia de admisión
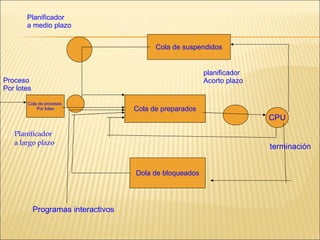
- 12. Cola de suspendidos Cola de preparados Dola de bloqueados Cola de procesos Por lotes CPU Programas interactivos Planificador a largo plazo planificador Acorto plazo terminación Planificador a medio plazo Proceso Por lotes
- 13. 3.2.2. PLANIFICADOR A CORTO PLAZO Este planificador decide que procesos toman el control de la CPU. El PCP asigna el procesador entre el conjunto de procesos preparados residentes en memoria. Su principal objetivo es maximizar el rendimiento del sistema de acuerdo a con el conjunto de criterios elegidos. Al estar a cargo de la transición de estado preparado a ejecución, el PCP deberá ser invocado cuando se realice una operación de conmutación de procesos para seleccionar
- 14. 3 PLANIFICACIÓN DE PROCESOS el siguiente proceso a ejecutar. En la pr´actica el PCP es llamado cada vez que un suceso interno o externo hace que se modifique alguna de las condiciones que definen el estado actual del sistema. Algunos de los sucesos que provocan una re planificación en virtud de su capacidad de modificar el estado del sistema son:
- 15. 1 . Tics de reloj, es decir, interrupciones basadas en el tiempo. 2. Interrupciones y terminaciones de operaciones de E/S. 3. Llamadas de operación al sistema operativo frente a llamadas de consulta. 4. Envió y recepción de señales. 5. Activación de programas interactivos. para su ejecución. En general, cada vez que ocurre uno de estos sucesos, el SO llama al PCP para determinar si debería planificarse otro proceso
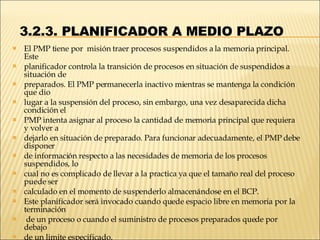
- 16. 3.2.3. PLANIFICADOR A MEDIO PLAZO El PMP tiene por misión traer procesos suspendidos a la memoria principal. Este planificador controla la transición de procesos en situación de suspendidos a situación de preparados. El PMP permanecerla inactivo mientras se mantenga la condición que dio lugar a la suspensión del proceso, sin embargo, una vez desaparecida dicha condición el PMP intenta asignar al proceso la cantidad de memoria principal que requiera y volver a dejarlo en situación de preparado. Para funcionar adecuadamente, el PMP debe disponer de información respecto a las necesidades de memoria de los procesos suspendidos, lo cual no es complicado de llevar a la practica ya que el tamaño real del proceso puede ser calculado en el momento de suspenderlo almacenándose en el BCP. Este planificador será invocado cuando quede espacio libre en memoria por la terminación de un proceso o cuando el suministro de procesos preparados quede por debajo de un limite especificado.
- 17. Antes de comenzar a estudiar los distintos tipos de algoritmos de planificación es importante tener en cuenta que hay dos categorías generales de estos.
- 19. La disciplina de planificación mas sencilla es el algoritmo FCFS. La carga de trabajo se procesa simplemente en un orden de llegada.
- 20. P 1 P 2 P 2 : T E = 0 T S = 2 T R = 2 T R = 12 P 1 : T E = 2 T S = 20 T R = 22 T E = 1
- 21. En entornos interactivos tales como sistemas de tiempo compartido, el requisito principal es proporcionar tiempos de espera razonablemente buenos y, en general, compartir los recursos del sistema equitativamente entre todos los usuarios.
- 22. se define como el tiempo de retorno/tiempo de servicio. ejercicio Sea una sistema con 5 procesos activos, los tiempos de activación y de servicio de cada uno de ellos son los siguiente
- 23. tiempo de llegada Tll 0 2 4 6 8 tiempo de servicio TS 3 6 4 5 2 1. Obtener el datagrama de ejecución si el algoritmo de planificación utilizado es FCFS. 2. Cronograma de ejecución si la planificación es Round-Robin con una cuota de una unidad de tiempo. 3. Cronograma de ejecución si la planificación es Round-Robin con una cuota de cuatro unidades de tiempo
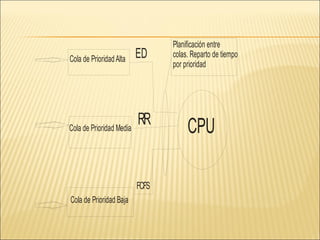
- 24. Cada proceso del sistema está asignado a un nivel de prioridad y el planificador siempre elige al proceso preparado con prioridad mas alta. Estas prioridades pueden ser estáticas o dinámicas. La prioridad estática no variara a lo largo del ciclo de vida del proceso mientras que la prioridad dinámica si puede hacerlo.
- 26. En sistemas mixtos donde coexisten procesos interactivos y procesos por lotes, resulta mas conveniente adoptar una planificación compleja que combine a varias disciplinas.