3. 114/05/01 CS201 3
What is a tree?
• Trees are structures used to represent hierarchical
relationship
• Each tree consists of nodes and edges
• Each node represents an object
• Each edge represents the relationship between two
nodes.
edge
node
4. 114/05/01 CS201 4
Some applications of Trees
President
VP
Personnel
VP
Marketing
Director
Customer
Relation
Director
Sales
Organization Chart
+
* 5
3 2
Expression Tree
5. 114/05/01 CS201 5
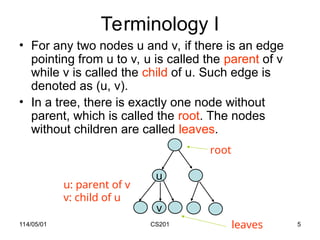
Terminology I
• For any two nodes u and v, if there is an edge
pointing from u to v, u is called the parent of v
while v is called the child of u. Such edge is
denoted as (u, v).
• In a tree, there is exactly one node without
parent, which is called the root. The nodes
without children are called leaves.
u
v
root
u: parent of v
v: child of u
leaves
6. 114/05/01 CS201 6
Terminology II
• In a tree, the nodes without children are
called leaves. Otherwise, they are called
internal nodes.
internal nodes
leaves
7. 114/05/01 CS201 7
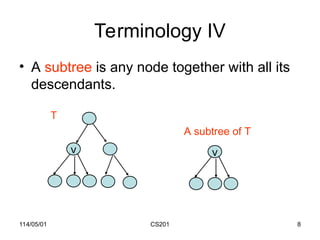
Terminology III
• If two nodes have the same parent, they are
siblings.
• A node u is an ancestor of v if u is parent of v or
parent of parent of v or …
• A node v is a descendent of u if v is child of v or
child of child of v or …
u
v w
x
v and w are siblings
u and v are ancestors of x
v and x are descendents of u
9. 114/05/01 CS201 9
Terminology V
• Level of a node n: number of nodes on the path from
root to node n
• Height of a tree: maximum level among all of its node
n
Level 1
Level 2
Level 3
Level 4
height=4
10. 114/05/01 CS201 10
Binary Tree
• Binary Tree: Tree in which every node has at
most 2 children
• Left child of u: the child on the left of u
• Right child of u: the child on the right of u
u
x y
z
w
v
x: left child of u
y: right child of u
w: right child of v
z: left child of w
11. 114/05/01 CS201 11
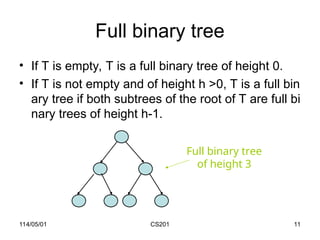
Full binary tree
• If T is empty, T is a full binary tree of height 0.
• If T is not empty and of height h >0, T is a full bin
ary tree if both subtrees of the root of T are full bi
nary trees of height h-1.
Full binary tree
of height 3
12. 114/05/01 CS201 12
Property of binary tree (I)
• A full binary tree of height h has 2h
-1
nodes
No. of nodes = 20
+ 21
+ … + 2(h-1)
= 2h
– 1
Level 1: 20
nodes
Level 2: 21
nodes
Level 3: 22
nodes
13. 114/05/01 CS201 13
Property of binary tree (II)
• Consider a binary tree T of height h. The
number of nodes of T 2h
-1
Reason: you cannot have more nodes than
a full binary tree of height h.
14. 114/05/01 CS201 14
Property of binary tree (III)
• The minimum height of a binary tree with n
nodes is log(n+1)
By property (II), n 2h
-1
Thus, 2h
n+1
That is, h log2 (n+1)
15. 114/05/01 CS201 15
Binary Tree ADT
binary
binary
tree
tree
setLeft, setRight
getElem
getLeft, getRight
isEmpty, isFull,
isComplete
setElem
makeTree
17. 114/05/01 CS201 17
An array-based representation
–1: empty tree
d
b f
a c e
nodeNum item leftChild rightChild
0 d 1 2
1 b 3 4
2 f 5 -1
3 a -1 -1
4 c -1 -1
5 e -1 -1
6 ? ? ?
7 ? ? ?
8 ? ? ?
9 ? ? ?
... ..... ..... ....
0
6
free
root
18. 114/05/01 CS201 18
Reference Based
Representation
NULL: empty tree left right
element
d
b f
a c
d
b f
a c
You can code this with a
class of three fields:
Object element;
BinaryNode left;
BinaryNode right;
19. 114/05/01 CS201 19
Tree Traversal
• Given a binary tree, we may like to do
some operations on all nodes in a binary
tree. For example, we may want to double
the value in every node in a binary tree.
• To do this, we need a traversal algorithm
which visits every node in the binary tree.
20. 114/05/01 CS201 20
Ways to traverse a tree
• There are three main ways to traverse a tree:
– Pre-order:
• (1) visit node, (2) recursively visit left subtree, (3) recursively
visit right subtree
– In-order:
• (1) recursively visit left subtree, (2) visit node, (3) recursively
right subtree
– Post-order:
• (1) recursively visit left subtree, (2) recursively visit right subtr
ee, (3) visit node
– Level-order:
• Traverse the nodes level by level
• In different situations, we use different traversal
algorithm.
21. 114/05/01 CS201 21
Examples for expression tree
• By pre-order, (prefix)
+ * 2 3 / 8 4
• By in-order, (infix)
2 * 3 + 8 / 4
• By post-order, (postfix)
2 3 * 8 4 / +
• By level-order,
+ * / 2 3 8 4
• Note 1: Infix is what we read!
• Note 2: Postfix expression can be computed
efficiently using stack
+
* /
2 3 8 4
22. 114/05/01 CS201 22
Pre-order
Algorithm pre-order(BTree x)
If (x is not empty) {
print x.getItem(); // you can do other things!
pre-order(x.getLeftChild());
pre-order(x.getRightChild());
}
23. 114/05/01 CS201 23
Pre-order example
Pre-order(a);
a
b c
d
Print a;
Pre-order(b);
Pre-order(c);
Print b;
Pre-order(d);
Pre-order(null);
Print c;
Pre-order(null);
Pre-order(null);
Print d;
Pre-order(null);
Pre-order(null);
a b d c
24. 114/05/01 CS201 24
Time complexity of Pre-order
Traversal
• For every node x, we will call
pre-order(x) one time, which performs
O(1) operations.
• Thus, the total time = O(n).
25. 114/05/01 CS201 25
In-order and post-order
Algorithm in-order(BTree x)
If (x is not empty) {
in-order(x.getLeftChild());
print x.getItem(); // you can do other things!
in-order(x.getRightChild());
}
Algorithm post-order(BTree x)
If (x is not empty) {
post-order(x.getLeftChild());
post-order(x.getRightChild());
print x.getItem(); // you can do other things!
}
26. 114/05/01 CS201 26
In-order example
In-order(a);
a
b c
d
In-order(b);
Print a;
In-order(c);
In-order(d);
Print b;
In-order(null);
In-order(null);
Print c;
In-order(null);
In-order(null);
Print d;
In-order(null);
d b a c
27. 114/05/01 CS201 27
Post-order example
Post-order(a);
a
b c
d
Post-order(b);
Post-order(c);
Print a;
Post-order(d);
Post-order(null);
Print b;
Post-order(null);
Print c;
Post-order(null);
Post-order(null);
Post-order(null);
Print d;
d b c a
28. 114/05/01 CS201 28
Time complexity for in-order and
post-order
• Similar to pre-order traversal, the time
complexity is O(n).
29. 114/05/01 CS201 29
Level-order
• Level-order traversal requires a queue!
Algorithm level-order(BTree t)
Queue Q = new Queue();
BTree n;
Q.enqueue(t); // insert pointer t into Q
while (! Q.empty()){
n = Q.dequeue(); //remove next node from the front of Q
if (!n.isEmpty()){
print n.getItem(); // you can do other things
Q.enqueue(n.getLeft()); // enqueue left subtree on rear of Q
Q.enqueue(n.getRight()); // enqueue right subtree on rear of Q
};
};
30. 114/05/01 CS201 30
Time complexity of Level-order
traversal
• Each node will enqueue and dequeue one
time.
• For each node dequeued, it only does one
print operation!
• Thus, the time complexity is O(n).
31. 114/05/01 CS201 31
General tree implementation
struct TreeNode
{
Object element
TreeNode *firstChild
TreeNode *nextsibling
}
because we do not know how many children a
node has in advance.
• Traversing a general tree is similar to traversing
a binary tree
A
G
F
D
C
B E
32. 114/05/01 CS201 32
Summary
• We have discussed
– the tree data-structure.
– Binary tree vs general tree
– Binary tree ADT
• Can be implemented using arrays or references
– Tree traversal
• Pre-order, in-order, post-order, and level-order
34. 114/05/01 CS201 34
What is a graph?
• Graphs represent the relationships among data
items
• A graph G consists of
– a set V of nodes (vertices)
– a set E of edges: each edge connects two nodes
• Each node represents an item
• Each edge represents the relationship between
two items
node
edge
35. 114/05/01 CS201 35
Examples of graphs
H
H
C H
H
Molecular Structure
Server 1
Server 2
Terminal 1
Terminal 2
Computer Network
Other examples: electrical and communication networks,
airline routes, flow chart, graphs for planning projects
36. 114/05/01 CS201 36
Formal Definition of graph
• The set of nodes is denoted as V
• For any nodes u and v, if u and v are
connected by an edge, such edge is denoted
as (u, v)
• The set of edges is denoted as E
• A graph G is defined as a pair (V, E)
v
u
(u, v)
37. 114/05/01 CS201 37
Adjacent
• Two nodes u and v are said to be adjacent
if (u, v) E
v
w
u
(u, v)
u and v are adjacent
v and w are not adjacent
38. 114/05/01 CS201 38
Path and simple path
• A path from v1 to vk is a sequence of node
s v1, v2, …, vk that are connected by edges
(v1, v2), (v2, v3), …, (vk-1, vk)
• A path is called a simple path if every nod
e appears at most once.
v1
v2
v4
v3
v5
- v2, v3, v4, v2, v1 is a path
- v2, v3, v4, v5 is a path, also it
is a simple path
39. 114/05/01 CS201 39
Cycle and simple cycle
• A cycle is a path that begins and ends at
the same node
• A simple cycle is a cycle if every node
appears at most once, except for the first
and the last nodes
v1
v2
v4
v3
v5
- v2, v3, v4, v5 , v3, v2 is a cycle
- v2, v3, v4, v2 is a cycle, it is
also a simple cycle
40. 114/05/01 CS201 40
Connected graph
• A graph G is connected if there exists path
between every pair of distinct nodes;
otherwise, it is disconnected
v1
v4
v3
v5
v2
This is a connected graph because there exists
path between every pair of nodes
41. 114/05/01 CS201 41
Example of disconnected graph
v1
v4
v3
v5
v2
This is a disconnected graph because there does not
exist path between some pair of nodes, says, v1 and
v7
v7
v6
v8
v9
42. 114/05/01 CS201 42
Connected component
• If a graph is disconnect, it can be partitioned into
a number of graphs such that each of them is
connected. Each such graph is called a
connected component.
v1
v4
v3
v5
v2 v7
v6
v8
v9
43. 114/05/01 CS201 43
Complete graph
• A graph is complete if each pair of distinct
nodes has an edge
Complete graph
with 3 nodes
Complete graph
with 4 nodes
44. 114/05/01 CS201 44
Subgraph
• A subgraph of a graph G =(V, E) is a grap
h H = (U, F) such that U V and
F E.
v1
v4
v3
v5
v2
G
v4
v3
v5
v2
H
45. 114/05/01 CS201 45
Weighted graph
• If each edge in G is assigned a weight, it is
called a weighted graph
Houston
Chicago 1000
2000
3500
New York
46. 114/05/01 CS201 46
Directed graph (digraph)
• All previous graphs are undirected graph
• If each edge in E has a direction, it is called a directed
edge
• A directed graph is a graph where every edges is a
directed edge
Directed edge
Houston
Chicago 1000
2000 3500
New York
47. 114/05/01 CS201 47
More on directed graph
• If (x, y) is a directed edge, we say
– y is adjacent to x
– y is successor of x
– x is predecessor of y
• In a directed graph, directed path, directed
cycle can be defined similarly
y
x
48. 114/05/01 CS201 48
Multigraph
• A graph cannot have duplicate edges.
• Multigraph allows multiple edges and self
edge (or loop).
Multiple edge
Self edge
49. 114/05/01 CS201 49
Property of graph
• A undirected graph that is connected and
has no cycle is a tree.
• A tree with n nodes have exactly n-1
edges.
• A connected undirected graph with n
nodes must have at least n-1 edges.
50. 114/05/01 CS201 50
Implementing Graph
• Adjacency matrix
– Represent a graph using a two-dimensional
array
• Adjacency list
– Represent a graph using n linked lists where
n is the number of vertices
55. 114/05/01 CS201 55
Pros and Cons
• Adjacency matrix
– Allows us to determine whether there is an
edge from node i to node j in O(1) time
• Adjacency list
– Allows us to find all nodes adjacent to a given
node j efficiently
– If the graph is sparse, adjacency list requires
less space
56. 114/05/01 CS201 56
Problems related to Graph
• Graph Traversal
• Topological Sort
• Spanning Tree
• Minimum Spanning Tree
• Shortest Path
57. 114/05/01 CS201 57
Graph Traversal Algorithm
• To traverse a tree, we use tree traversal
algorithms like pre-order, in-order, and post-
order to visit all the nodes in a tree
• Similarly, graph traversal algorithm tries to visit
all the nodes it can reach.
• If a graph is disconnected, a graph traversal that
begins at a node v will visit only a subset of
nodes, that is, the connected component
containing v.
58. 114/05/01 CS201 58
Two basic traversal algorithms
• Two basic graph traversal algorithms:
– Depth-first-search (DFS)
• After visit node v, DFS strategy proceeds along a
path from v as deeply into the graph as possible
before backing up
– Breadth-first-search (BFS)
• After visit node v, BFS strategy visits every node a
djacent to v before visiting any other nodes
59. 114/05/01 CS201 59
Depth-first search (DFS)
• DFS strategy looks similar to pre-order. From a given no
de v, it first visits itself. Then, recursively visit its unvisite
d neighbours one by one.
• DFS can be defined recursively as follows.
Algorithm dfs(v)
print v; // you can do other things!
mark v as visited;
for (each unvisited node u adjacent to v)
dfs(u);
60. 114/05/01 CS201 60
DFS example
• Start from v3
v1
v4
v3
v5
v2
G
v3
1
v2
2
v1
3
v4
4
v5
5
x
x
x
x x
61. 114/05/01 CS201 61
Non-recursive version of DFS
algorithm
Algorithm dfs(v)
s.createStack();
s.push(v);
mark v as visited;
while (!s.isEmpty()) {
let x be the node on the top of the stack s;
if (no unvisited nodes are adjacent to x)
s.pop(); // blacktrack
else {
select an unvisited node u adjacent to x;
s.push(u);
mark u as visited;
}
}
62. 114/05/01 CS201 62
Non-recursive DFS example
v1
v4
v3
v5
v2
G
visit stack
v3 v3
v2 v3, v2
v1 v3, v2, v1
backtrack v3, v2
v4 v3, v2, v4
v5 v3, v2, v4 , v5
backtrack v3, v2, v4
backtrack v3, v2
backtrack v3
backtrack empty
x
x
x
x x
63. 114/05/01 CS201 63
Breadth-first search (BFS)
• BFS strategy looks similar to level-order. From a
given node v, it first visits itself. Then, it visits ev
ery node adjacent to v before visiting any other n
odes.
– 1. Visit v
– 2. Visit all v’s neigbours
– 3. Visit all v’s neighbours’ neighbours
– …
• Similar to level-order, BFS is based on a queue.
64. 114/05/01 CS201 64
Algorithm for BFS
Algorithm bfs(v)
q.createQueue();
q.enqueue(v);
mark v as visited;
while(!q.isEmpty()) {
w = q.dequeue();
for (each unvisited node u adjacent to w) {
q.enqueue(u);
mark u as visited;
}
}
65. 114/05/01 CS201 65
BFS example
• Start from v5
v5
1
v3
2
v4
3
v2
4
v1
5
v1
v4
v3
v5
v2
G
x
Visit Queue
(front to
back)
v5 v5
empty
v3 v3
v4 v3, v4
v4
v2 v4, v2
v2
empty
v1 v1
empty
x
x
x x
66. 114/05/01 CS201 66
Topological order
• Consider the prerequisite structure for courses:
• Each node x represents a course x
• (x, y) represents that course x is a prerequisite to course y
• Note that this graph should be a directed graph without cycles
(called a directed acyclic graph).
• A linear order to take all 5 courses while satisfying all prerequisites
is called a topological order.
• E.g.
– a, c, b, e, d
– c, a, b, e, d
b d
e
c
a
67. 114/05/01 CS201 67
Topological sort
• Arranging all nodes in the graph in a topological
order
Algorithm topSort
n = |V|;
for i = 1 to n {
select a node v that has no successor;
aList.add(1, v);
delete node v and its edges from the graph;
}
return aList;
68. 114/05/01 CS201 68
Example
b d
e
c
a
1. d has no
successor!
Choose d!
a
5. Choose a!
The topological
order is
a,b,c,e,d
2. Both b and e have
no successor!
Choose e!
b
e
c
a
3. Both b and c have
no successor!
Choose c!
b
c
a
4. Only b has no
successor!
Choose b!
b
a
69. 114/05/01 CS201 69
Topological sort algorithm 2
• This algorithm is based on DFS
Algorithm topSort2
s.createStack();
for (all nodes v in the graph) {
if (v has no predecessors) {
s.push(v);
mark v as visited;
}
}
while (!s.isEmpty()) {
let x be the node on the top of the stack s;
if (no unvisited nodes are adjacent to x) { // i.e. x has no unvisited successor
aList.add(1, x);
s.pop(); // blacktrack
} else {
select an unvisited node u adjacent to x;
s.push(u);
mark u as visited;
}
}
return aList;
70. 114/05/01 CS201 70
Spanning Tree
• Given a connected undirected graph G, a
spanning tree of G is a subgraph of G that
contains all of G’s nodes and enough of its
edges to form a tree.
v1
v4
v3
v5
v2
Spanning
tree Spanning tree is not unique!
71. 114/05/01 CS201 71
DFS spanning tree
• Generate the spanning tree edge during the DF
S traversal.
Algorithm dfsSpanningTree(v)
mark v as visited;
for (each unvisited node u adjacent to v) {
mark the edge from u to v;
dfsSpanningTree(u);
}
• Similar to DFS, the spanning tree edges can be generate
d based on BFS traversal.
72. 114/05/01 CS201 72
Example of generating spanning
tree based on DFS
v1
v4
v3
v5
v2
G
stack
v3 v3
v2 v3, v2
v1 v3, v2, v1
backtrack v3, v2
v4 v3, v2, v4
v5 v3, v2, v4 , v5
backtrack v3, v2, v4
backtrack v3, v2
backtrack v3
backtrack empty
x
x
x
x x
73. 114/05/01 CS201 73
Minimum Spanning Tree
• Consider a connected undirected graph where
– Each node x represents a country x
– Each edge (x, y) has a number which measures the
cost of placing telephone line between country x and
country y
• Problem: connecting all countries while
minimizing the total cost
• Solution: find a spanning tree with minimum total
weight, that is, minimum spanning tree
74. 114/05/01 CS201 74
Formal definition of minimum
spanning tree
• Given a connected undirected graph G.
• Let T be a spanning tree of G.
• cost(T) = eTweight(e)
• The minimum spanning tree is a spanning tree T
which minimizes cost(T)
v1
v4
v3
v5
v2
5
2
3 7
8
4
Minimum
spanning
tree
75. 114/05/01 CS201 75
Prim’s algorithm (I)
Start from v5, find the
minimum edge attach to
v5
v2
v1
v4
v3
v5
5 2
3 7
8
4
Find the minimum
edge attach to v3 and
v5
v2
v1
v4
v3
v5
5 2
3 7
8
4
Find the minimum
edge attach to v2, v3
and v5
v2
v1
v4
v3
v5
5 2
3 7
8
4
v2
v1
v4
v3
v5
5 2
3 7
8
4
v2
v1
v4
v3
v5
5 2
3 7
8
4
Find the minimum edge
attach to v2, v3 , v4 and v5
76. 114/05/01 CS201 76
Prim’s algorithm (II)
Algorithm PrimAlgorithm(v)
• Mark node v as visited and include it in the mini
mum spanning tree;
• while (there are unvisited nodes) {
– find the minimum edge (v, u) between a visited node v
and an unvisited node u;
– mark u as visited;
– add both v and (v, u) to the minimum spanning tree;
}
77. 114/05/01 CS201 77
Shortest path
• Consider a weighted directed graph
– Each node x represents a city x
– Each edge (x, y) has a number which represent the
cost of traveling from city x to city y
• Problem: find the minimum cost to travel from
city x to city y
• Solution: find the shortest path from x to y
78. 114/05/01 CS201 78
Formal definition of shortest
path
• Given a weighted directed graph G.
• Let P be a path of G from x to y.
• cost(P) = ePweight(e)
• The shortest path is a path P which minimizes c
ost(P)
v2
v1
v4
v3
v5
5
2
3 4
8
4 Shortest Path
79. 114/05/01 CS201 79
Dijkstra’s algorithm
• Consider a graph G, each edge (u, v) has
a weight w(u, v) > 0.
• Suppose we want to find the shortest path
starting from v1 to any node vi
• Let VS be a subset of nodes in G
• Let cost[vi] be the weight of the shortest
path from v1 to vi that passes through
nodes in VS only.
80. 114/05/01 CS201 80
Example for Dijkstra’s algorithm
v2
v1
v4
v3
v5
5
2
3 4
8
4
v VS cost[v1] cost[v2] cost[v3] cost[v4] cost[v5]
1 [v1] 0 5 ∞ ∞ ∞
84. 114/05/01 CS201 84
Dijkstra’s algorithm
Algorithm shortestPath()
n = number of nodes in the graph;
for i = 1 to n
cost[vi] = w(v1, vi);
VS = { v1 };
for step = 2 to n {
find the smallest cost[vi] s.t. vi is not in VS;
include vi to VS;
for (all nodes vj not in VS) {
if (cost[vj] > cost[vi] + w(vi, vj))
cost[vj] = cost[vi] + w(vi, vj);
}
}
85. 114/05/01 CS201 85
Summary
• Graphs can be used to represent many real-life
problems.
• There are numerous important graph algorithms.
• We have studied some basic concepts and
algorithms.
– Graph Traversal
– Topological Sort
– Spanning Tree
– Minimum Spanning Tree
– Shortest Path














































![114/05/01 CS201 51
Adjacency matrix for directed graph
v1
v4
v3
v5
v2
G
1 2 3 4 5
v1 v2 v3 v4 v5
1 v1 0 1 0 0 0
2 v2 0 0 0 1 0
3 v3 0 1 0 1 0
4 v4 0 0 0 0 0
5 v5 0 0 1 1 0
Matrix[i][j] = 1 if (vi, vj)E
0 if (vi, vj)E](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-51-320.jpg)
![114/05/01 CS201 52
Adjacency matrix for weighted
undirected graph
v1
v4
v3
v5
v2
G
1 2 3 4 5
v1 v2 v3 v4 v5
1 v1 ∞ 5 ∞ ∞ ∞
2 v2 5 ∞ 2 4 ∞
3 v3 0 2 ∞ 3 7
4 v4 ∞ 4 3 ∞ 8
5 v5 ∞ ∞ 7 8 ∞
Matrix[i][j] = w(vi, vj) if (vi, vj)E or (vj, vi)E
∞ otherwise
5
2
3 7
8
4](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-52-320.jpg)


























![114/05/01 CS201 79
Dijkstra’s algorithm
• Consider a graph G, each edge (u, v) has
a weight w(u, v) > 0.
• Suppose we want to find the shortest path
starting from v1 to any node vi
• Let VS be a subset of nodes in G
• Let cost[vi] be the weight of the shortest
path from v1 to vi that passes through
nodes in VS only.](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-79-320.jpg)
![114/05/01 CS201 80
Example for Dijkstra’s algorithm
v2
v1
v4
v3
v5
5
2
3 4
8
4
v VS cost[v1] cost[v2] cost[v3] cost[v4] cost[v5]
1 [v1] 0 5 ∞ ∞ ∞](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-80-320.jpg)
![114/05/01 CS201 81
Example for Dijkstra’s algorithm
v2
v1
v4
v3
v5
5
2
3 4
8
4
v VS cost[v1] cost[v2] cost[v3] cost[v4] cost[v5]
1 [v1] 0 5 ∞ ∞ ∞
2 v2 [v1, v2] 0 5 ∞ 9 ∞](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-81-320.jpg)
![114/05/01 CS201 82
Example for Dijkstra’s algorithm
v2
v1
v4
v3
v5
5
2
3 4
8
4
v VS cost[v1] cost[v2] cost[v3] cost[v4] cost[v5]
1 [v1] 0 5 ∞ ∞ ∞
2 v2 [v1, v2] 0 5 ∞ 9 ∞
3 v4 [v1, v2, v4] 0 5 12 9 17](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-82-320.jpg)
![114/05/01 CS201 83
Example for Dijkstra’s algorithm
v2
v1
v4
v3
v5
5
2
3 4
8
4
v VS cost[v1] cost[v2] cost[v3] cost[v4] cost[v5]
1 [v1] 0 5 ∞ ∞ ∞
2 v2 [v1, v2] 0 5 ∞ 9 ∞
3 v4 [v1, v2, v4] 0 5 12 9 17
4 v3 [v1, v2, v4, v3] 0 5 12 9 16
5 v5 [v1, v2, v4, v3, v5] 0 5 12 9 16](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-83-320.jpg)
![114/05/01 CS201 84
Dijkstra’s algorithm
Algorithm shortestPath()
n = number of nodes in the graph;
for i = 1 to n
cost[vi] = w(v1, vi);
VS = { v1 };
for step = 2 to n {
find the smallest cost[vi] s.t. vi is not in VS;
include vi to VS;
for (all nodes vj not in VS) {
if (cost[vj] > cost[vi] + w(vi, vj))
cost[vj] = cost[vi] + w(vi, vj);
}
}](https://image.slidesharecdn.com/cs201-tree-graph-250501153301-5e7b080c/85/Concise-Notes-on-tree-and-graph-data-structure-84-320.jpg)
