











Fire fighting robot using 8051 microcontroller
- 1. Centre for Fire, Explosive & Environment Safety (CFEES) DRDO, Ministry of Defence vibs VIBHANSHU SINGH ECE, 4th Year
- 2. This is movement based robot. It used to sense the fire and spreads the water over that direction. Firefighting is the act of extinguishing fires, i.e.; it sprinkles water on to fire. The robotic vehicle is loaded with the water tanker and a pump which is controlled by microcontroller. Introduction
- 3. • The robotic vehicle consists of the following units: • A rectangular base to support the whole robot structure, attached to Four wheels for motion. • Four DC motors to provide required movement to the robot. • Power is provided by 9.6 V rechargeable batteries • Water tank is used to extinguish fire • Consist of IR sensor and proximity Sensor. • Consist of LM 35 sensor for temperature measurement. Designing the Robot
- 4. The robot vehicle loaded with the water tanker. The pump is controlled by an 8051 microcontroller. All motors are connected to the microcontroller. An IR sensor, Proximity sensor and LM35 are connected to microprocessor. Using these sensors commands are sent to the microcontroller and control moment of the robot like forward, backward, left, right. These sensors detect the fire and helps robot to extinguish fire. Once the robot reaches the desired location, then the robot stops and activates the sprayer to that fire. Working Principle
- 5. The microcontroller is the most important part of the design – acts as brain for robot Interfaces all sensors and motors Contains all code for robot operation Here 8051 microcontroller is used. Microcontroller
- 6. Sensors were needed to detect candle flame, exact location of candle flame, temperature and robot’s proximity to measure the distance from fire. Several sensors chosen IR Sensor LM 35 Temperature Sensor Proximity Sensors Sensors
- 7. IR Sensors IR sensors use infra red light to sense objects in front of them. A pulse of infra red light is emitted from the emitter and spreads out in a large arc. If no object is detected then the IR light continues forever and no reading is recorded. However, if an object is nearby then the IR light will be reflected and some of it will hit the detector. This forms a simple triangle between the object, emitter and detector. The detector is able to detect the angle that the IR light arrived back at and thus can determine the distance to the object.
- 8. LM35 Temperature Sensor Temperature sensor is a device which senses variations in temperature across it. LM35 is a basic temperature sensor. It give the readings in centigrade(degree Celsius)since its output voltage is linearly proportional to temperature. It uses the fact that as temperature increases, the voltage across diode increases at known rate(actually the drop across base-emitter junction of transistor). Features Calibrated directly in ˚ Celsius (Centigrade) Rated for full l −55˚ to +150˚C range Suitable for remote applications Low cost due to wafer-level trimming Operates from 4 to 30 volts Low self-heating, ±1/4˚C of typical nonlinearity
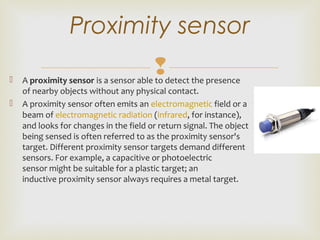
- 9. A proximity sensor is a sensor able to detect the presence of nearby objects without any physical contact. A proximity sensor often emits an electromagnetic field or a beam of electromagnetic radiation (infrared, for instance), and looks for changes in the field or return signal. The object being sensed is often referred to as the proximity sensor's target. Different proximity sensor targets demand different sensors. For example, a capacitive or photoelectric sensor might be suitable for a plastic target; an inductive proximity sensor always requires a metal target. Proximity sensor
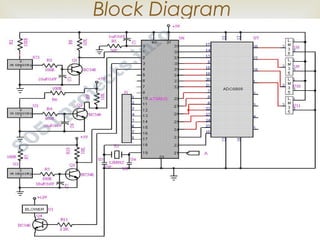
- 10. Block Diagram
- 11. Prevention from dangerous incidents. Minimization of –ecological consequences –financial loss –a threat to a human life. Protect fireman from risk their life. Provide facility to fire station to extinguish the fire. Advantages
- 12. Suitable for: Fire department Factory High explosion area chemical industries Petrol station Applications
- 13. Experimental work has been carried out carefully. The proposed method is verified to be great beneficial for the security purpose and industrial purpose. The project has been motivated by the desire to design a system that can detect fires and take appropriate action, without any human intervention. This provides us the opportunity to pass on to robots tasks that traditionally humans had to do but were inherently life threatening. It can be enhanced by interfacing it with a wireless camera so that the person controlling it can view the operation of the robot remotely on a screen. Conclusions
- 14. Robotics References: 3. http://members.verizon.net/~vze2b2zf/robotpage.html 4. http://abrobotics.tripod.com/Snuffy/snuffy.htm Part References: 5. http://bd.thrijswijk.nl/thrsim11/68hc11/about2.htm. 6. http://abrobotics.tripod.com/Snuffy/uvtron.htm 7. http://www.acroname.com Book References: 8. Software and Hardware Engineering, Fredrick M. Cady, Copyright 1997, Oxford University Press, Inc. References