NN-Nearest Neighbor and PDAF-Probabilistic Data Association Filters
0 likes341 views

This document provides an overview of nearest neighbor (NN) and probabilistic data association (PDA) filters for multi-object filtering and multi-target tracking. It describes the challenges of measurement to track assignment when detections are ambiguous due to inaccuracies, missed detections and false alarms. It then explains NN, PDA and track splitting filters, noting PDA computes association probabilities to provide a more robust approach. The document concludes by comparing NN and PDA, noting PDA avoids hard associations and incorporates association uncertainty for better performance in challenging scenarios.




















![References
[1] Yaakov Bar-Shalom, Fred Daum, Jim Huang, The Probabilistic Data
Association Filter: Estimation in the Presence of Measurement Origin
Uncertainty, IEEE Control Systems Magazine, December 2009
[2] Y. Bar-Shalom, X. Rong Li, T. Kirubarajan, “Estimation with Applications to
Tracking and Navigation”, Wiley, 2001
[3] U. Orguner, “Target Tracking”, Lecture notes, Linköpings University, 2010.
[4] Y. Bar-Shalom, F. Daum, and J. Huang, “The Probabilistic Data Association
Filter,” IEEE Control System Magazine, 29(6), Dec. 2009.
[5] S.S. Blackman, R. Popoli, “Design and Analysis of Modern Tracking
Systems”, Artech House, 1999
[6] Human-Oriented Robotics , Prof. Kai Arras, Social Robotics Lab](https://image.slidesharecdn.com/moft-tutorials-stt-nearest-neighbor-and-probabilistic-data-association-filters-pdf-ppt-part1-v1-200614153143/85/NN-Nearest-Neighbor-and-PDAF-Probabilistic-Data-Association-Filters-22-320.jpg)



NN-Nearest Neighbor and PDAF-Probabilistic Data Association Filters
- 1. MOFT Tutorials Multi Object Filtering Multi Target Tracking Nearest Neighbor (NN) and Probabilistic Data Association (PDAF) Filters
- 2. NN and PDAF Filters Single Target Data Association ▪ most MTT applications require the simultaneous tracking of several objects ▪ measurement to track assignment is usually ambiguous due to ▪ inaccurate measurements ▪ missed detections ▪ false alarms. ▪ number of measurements delivered by the detection or segmentation process is usually not equal to the number of tracked objects ▪ a data association algorithm is required ▪ assigns the received measurements to the currently available object individual single-object trackers
- 3. NN and PDAF Filters ▪ determined associations are used to update the state estimate of each tracker ▪ list of tracks is passed to the classification and validation stage ▪ decides if an object actually exists and determines the class of the object. ▪ most critical part in multi-object tracking applications is the data association step ▪ an erroneous association decision at time k is irreversible ▪ typically leads to track losses
- 4. NN and PDAF Filters Gating ▪ measurement validation procedures to restrict the number of track to measurement assignments. ▪ quadratic form of the Mahalanobis distance (MHD) between a predicted measurement 𝐳+ and a received measurement 𝐳 𝑑 𝑀𝐻𝐷 2 𝐳, 𝐳+ ≜ 𝐳 − 𝐳+ 𝑇 𝐒−1 𝐳 − 𝐳+ where 𝐒 is the according innovation covariance ▪ quadratic MHD follows a χ2 distribution with 𝑑𝑖𝑚(𝐳) degrees of freedom ▪ measurements within the gate of track 𝑖 are obtained using 𝐙 𝒊 (𝜗) = 𝐳: 𝑑 𝑀𝐻𝐷 2 𝐳, 𝐳+ (𝒊) < 𝜗 where 𝜗 is the gating threshold
- 5. NN and PDAF Filters ▪ gate probability 𝑃𝐺, denotes the probability that the true measurement is located within the gating region, ▪ gating threshold 𝜗 is obtained from the cumulative distribution function of the χ2 distribution with 𝑑𝑖𝑚(𝐳) degrees of freedom ▪ common to use gate probabilities corresponding to the σ intervals of the Gaussian distribution, e.g. 𝑃𝐺 = 0.9973 for the 3σ gate. ▪ for small gates 𝜗 ≪ 3, probability that the true measurement is located within the gate is significantly smaller than one ▪ gating probability 𝑃𝐺 has to be considered in the filter updates in addition to the detection probability.
- 6. NN and PDAF Filters Single-Target Data Association Assumptions ▪ A single target to track ▪ Track already initialized ▪ Detection probability 𝑃 𝐷 < 1 ▪ False alarm probability 𝑃𝐹 > 0 Two groups of approaches Non-Bayesian: no association probabilities ▪ Nearest neighbor standard Filter (NNSF) ▪ Strongest neighbor standard Filter (SNSF) ▪ Track splitting Filter Bayesian: computes association probabilities ▪ Probabilistic data association Filter (PDAF)
- 7. NN and PDAF Filters Nearest Neighbor Standard Filter (NNSF) ▪ at each processing instant (each scan/each step) ▪ compute Mahalanobis distance to all measurement ▪ validate the measurements by gaiting ▪ accept the closest validated measurement ▪ update the track as if it were the correct one ▪ with some probability the selected measurement is not the correct one ▪ incorrect associations can lead to ▪ overconfident covariances (covariances collapse in any case) ▪ filter divergence and track loss
- 8. NN and PDAF Filters Strongest Neighbor Standard Filter (SNSF) ▪ at each processing instant (each scan/each step) ▪ compute Mahalanobis distance to all measurement ▪ validate the measurements by gating ▪ accept the strongest validated measurement ▪ update the track as if it were the correct one ▪ usable if there is a confidence measures or signal strength associated with each measurement ▪ a variant of NNSF and SNSF is to not associate in case of ambiguities
- 9. NN and PDAF Filters Track Splitting Filter ▪ at each processing instant (each scan/each step) ▪ if there is more than one measurement in the validation gate, split the track ▪ update each split track with the standard Kalman filter ▪ compute the likelihood of each track ▪ take a keep/discard decision by thresholding the likelihood ▪ exponential growth of number of tracks, unlikely tracks are discarded ▪ track likelihood describes the goodness of fit of the observations to the assumed target model ▪ no competition between the tracks because their likelihoods are computed separately
- 10. NN and PDAF Filters Single-Target Data Association ▪ NNSF, SNSF and TSF achieve acceptable performance in well behaved conditions ▪ detection probability 𝑃 𝐷 close to 1, ▪ false alarm probability 𝑃𝐹 close to zero ▪ conditions are more challenging in terms of origin uncertainty when measurements that originate from target are weak with respect to background signals and sensor noise ▪ false measurements in a tracking filter leads to divergence and track loss ▪ a more robust method is PDAF, Probabilistic Data Association Filter
- 11. NN and PDAF Filters PDAF, Probabilistic Data Association Filter ▪ probabilistic data association filter (PDAF) is a Bayesian approach that computes the probability of track-to-measurement associations ▪ instead of taking a hard decision, the PDAF updates the track with a weighted average of all validated measurements ▪ weights are the individual association probabilities ▪ define the association events 𝜃𝑖(𝑘) = ቊ 𝐳𝑖 𝑘 𝑖𝑠 𝑡ℎ𝑒 𝑐𝑜𝑟𝑟𝑒𝑐𝑡 𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑚𝑒𝑛𝑡 𝑖 = 1, ⋯ , 𝑚(𝑘) 𝑛𝑜 𝑐𝑜𝑟𝑟𝑒𝑐𝑡 𝑚𝑒𝑎𝑠𝑢𝑟𝑒𝑚𝑒𝑛𝑡 𝑖𝑛 𝑔𝑎𝑡𝑒 𝑖 = 0 where 𝑚(𝑘) is the number of validated measurements at time index 𝑘
- 12. NN and PDAF Filters PDAF is based on assumptions below: ▪ among the 𝑚(𝑘) validated measurements, at most (i.e. maximal) one of the validated observations is target-originated ▪ provided the target (the tracked object) was detected and its observation fell into the validation gate ▪ remaining measurements are due to false alarms and are modeled with uniform spatial distribution ▪ number of false alarms obeys a Poisson distribution (the previously considered false alarm model) ▪ targets are detected with known probability 𝑃 𝐷 , track-specific probabilities 𝑃 𝐷 𝑡 are possible
- 13. NN and PDAF Filters ▪ visualize association events in a tree ▪ each root-to-leaf branch can be seen as an association hypothesis
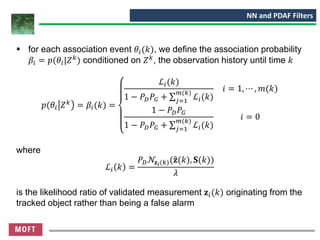
- 14. NN and PDAF Filters ▪ for each association event 𝜃𝑖(𝑘), we define the association probability 𝛽𝑖 = 𝑝(𝜃𝑖|𝑍 𝑘 ) conditioned on 𝑍 𝑘 , the observation history until time 𝑘 𝑝(𝜃𝑖 𝑍 𝑘 = 𝛽𝑖(𝑘) = ℒ𝑖(𝑘) 1 − 𝑃 𝐷 𝑃𝐺 + σ 𝑗=1 𝑚(𝑘) ℒ 𝑖(𝑘) 𝑖 = 1, ⋯ , 𝑚(𝑘) 1 − 𝑃 𝐷 𝑃𝐺 1 − 𝑃 𝐷 𝑃𝐺 + σ 𝑗=1 𝑚(𝑘) ℒ 𝑖(𝑘) 𝑖 = 0 where ℒ 𝑖 𝑘 = 𝑃 𝐷 𝒩𝐳 𝑖(𝑘)(ො𝐳(𝑘), 𝐒(𝑘)) 𝜆 is the likelihood ratio of validated measurement 𝐳𝑖(𝑘) originating from the tracked object rather than being a false alarm
- 15. NN and PDAF Filters ▪ ignore the normalizing denominators and consider the event that none of the validated measurements is the correct one, that is 𝑖 = 0 𝛽𝑖 𝑘 = 1 − 𝑃 𝐷 𝑃𝐺 1 − 𝑃 𝐷 𝑃𝐺 + σ 𝑗=1 𝑚(𝑘) ℒ𝑖(𝑘) ▪ parameter 𝑃𝐺 is the gate probability, the probability that the gate contains the true measurement if detected, corresponds to threshold 𝛾 𝐺 ▪ 𝑃 𝐷 𝑃𝐺 is the probability that the target has been detected and its measurement has fallen into the validation gate ▪ 1 − 𝑃 𝐷 𝑃𝐺 is the probability that the target has not been detected or its measurement has not fallen into the validation gate
- 16. NN and PDAF Filters ▪ in case validated measurement 𝐳𝑖(k) with 𝑖 = 1, ⋯ , 𝑚(𝑘) is the correct one, the likelihood ratio ℒ 𝑖 𝑘 = 𝑃 𝐷 𝒩𝐳 𝑖(𝑘)(ො𝐳(𝑘), 𝐒(𝑘)) 𝜆 trades off the probability that the measurement is target-originated with Gaussian density scaled by 𝑃 𝐷 versus the spatial uniform Poisson density for false alarms ▪ discrimination capability of the PDAF relies on the difference between the Gaussian and uniform densities ▪ association probabilities sum up to one,σ𝑖=1 𝑚(𝑘) 𝛽𝑖 𝑘 , because the association events are mutually exclusive and exhaustive
- 17. NN and PDAF Filters ▪ state update equation of the PDAF is the same as in the Kalman filter 𝐱 𝑘 𝑘 = 𝐱 𝑘 𝑘 − 1 + 𝐊(𝑘)𝐯(𝑘) but uses a combined innovation 𝐯 𝑘 = 𝑖=1 𝑚(𝑘) 𝛽𝑖 𝑘 𝐯𝑖(𝑘) that sums over all 𝑚(𝑘) association events incorporating all validated measurements ▪ combined innovation is a Gaussian mixture
- 18. NN and PDAF Filters ▪ covariance update of the PDAF is 𝐏 𝑘 𝑘 = 𝛽0 𝐏 𝑘 𝑘 − 1 + (1 − 𝛽0)𝐏 𝑘 𝑘 + ෩𝐏(𝑘) ▪ with probability 𝛽0 none of the measurements is correct, the predicted covariance appears with this weighting ("no update") ▪ with probability (1 − 𝛽0) the correct measurement is available and the posterior covariance appears with this weighting ▪ it is unknown which if the 𝑚(𝑘) validated measurements is correct, the term ෩𝐏 increases the covariance of the updated state ▪ increase is the effect of the measurement origin uncertainty ▪ covariance ෩𝐏 is the called spread of innovations
- 19. NN and PDAF Filters ▪ all other calculations in the PDAF ▪ state prediction ▪ state covariance prediction ▪ innovation covariance ▪ Kalman gain are the same as in the standard Kalman filter ▪ only difference is in the use of the combined innovation in the state update and the increased covariance of the updated state ▪ comparing to the nearest neighbor standard filter, the PDAF can be seen as an “all neighbors” filter ▪ computational requirements of the PDAF are modest, about double compared to the Kalman filter
- 20. NN and PDAF Filters Nearest Neighbor and PDAF ▪ NN algorithm associates the measurement with the smallest Euclidean or Mahalanobis distance to each object ▪ in case several measurements within the gate of an object, the association is ambiguous ▪ probability of assigning an incorrect measurement is considerably high ▪ erroneous associations are irreversible, NN algorithm performance rapidly decreases in such situations ▪ NN algorithm does not assume a measurement is generated by at most one object ▪ permits the association of a measurement to more than one object.
- 21. NN and PDAF Filters ▪ in scenarios with a high number of false alarms performance of the NN approaches significantly decreases ▪ probabilistic data association (PDA) is the calculation of a weighted state update using all possible track to measurement associations ▪ subsequent approximation of the posterior PDF using a single Gaussian distribution ▪ due to the weighted state update, the PDA avoids the hard and possibly erroneous association decisions of the NN approaches at the cost of an increased estimation error covariance ▪ similar to NN approaches, the performance of PDA decreases in situations where a measurement is located within the gate of several objects
- 22. References [1] Yaakov Bar-Shalom, Fred Daum, Jim Huang, The Probabilistic Data Association Filter: Estimation in the Presence of Measurement Origin Uncertainty, IEEE Control Systems Magazine, December 2009 [2] Y. Bar-Shalom, X. Rong Li, T. Kirubarajan, “Estimation with Applications to Tracking and Navigation”, Wiley, 2001 [3] U. Orguner, “Target Tracking”, Lecture notes, Linköpings University, 2010. [4] Y. Bar-Shalom, F. Daum, and J. Huang, “The Probabilistic Data Association Filter,” IEEE Control System Magazine, 29(6), Dec. 2009. [5] S.S. Blackman, R. Popoli, “Design and Analysis of Modern Tracking Systems”, Artech House, 1999 [6] Human-Oriented Robotics , Prof. Kai Arras, Social Robotics Lab
- 23. Other MOFT Tutorials – Lists and Links Introduction to Multi Target Tracking Bayesian Inference and Filtering Kalman Filtering Sequential Monte Carlo (SMC) Methods and Particle Filtering Single Object Filtering Single Target Tracking Nearest Neighbor(NN) and Probabilistic Data Association Filter(PDAF) Multi Object Filtering Multi Target Tracking Global Nearest Neighbor and Joint Probabilistic Data Association Filter Data Association in Multi Target Tracking Multiple Hypothesis Tracking, MHT
- 24. Other MOFT Tutorials – Lists and Links Random Finite Sets, RFS Random Finite Set Based RFS Filters RFS Filters, Probability Hypothesis Density, PHD RFS Filters, Cardinalized Probability Hypothesis Density, CPHD Filter RFS Filters, Multi Bernoulli MemBer and Cardinality Balanced MeMBer, CBMemBer Filter RFS Labeled Filters, Generalized Labeled Multi Bernoulli, GLMB and Labeled Multi Bernoulli, LMB Filters Multiple Model Methods in Multi Target Tracking Multi Target Tracking Implementation Multi Target Tracking Performance and Metrics