some adaptive control schemes implementations using matlab
Download as PPTX, PDF1 like562 views

This document discusses several adaptive control schemes and their implementation in MATLAB. It covers modified MIT rule model reference adaptive control based on Lyapunov stability theory, Kalman filters, and using filters in MATLAB. Specifically, it examines the effects of varying the adaptive gain and reference input amplitude in the MIT rule, proposes modifying the rule to overcome issues with different input amplitudes, and provides simulation results of a local model reference adaptive control for a robotic arm drive using MATLAB Simulink.































some adaptive control schemes implementations using matlab
- 1. Some Adaptive Control schemes implementations using matlab By: Laila Elsayid Gharib
- 2. Contents: • Mit rule and modified Mit rule MRAC based. • Application using Lyaponouv stability theory. • Kalman filter. • Filters using matlab.
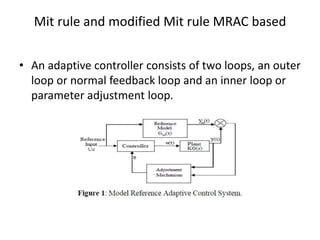
- 3. Mit rule and modified Mit rule MRAC based • An adaptive controller consists of two loops, an outer loop or normal feedback loop and an inner loop or parameter adjustment loop.
- 5. Gamma=0.5
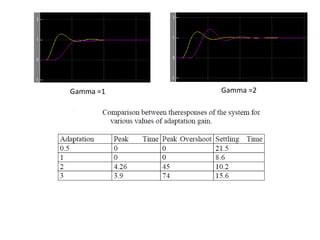
- 6. Gamma =1 Gamma =2
- 7. Uc=2 Uc=3
- 8. For various Gamma values
- 9. For various Uc values
- 10. Normalized or modified Mit rule
- 11. GAMMA=0.5 The drawbacks of the adaptive system using mit rule is that it is sensitive to the adaptive gain Gamma and the amplitude of the reference input signal, the modified mit rule overcome the amplitude of reference gain problem but makes the ranges of gamma extended to be within 0.5 and 5 for good performance otherwise system performn bad.
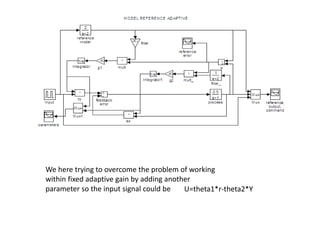
- 12. U=theta1*r-theta2*Y We here trying to overcome the problem of working within fixed adaptive gain by adding another parameter so the input signal could be
- 13. This is the output I got using simulation by simulink
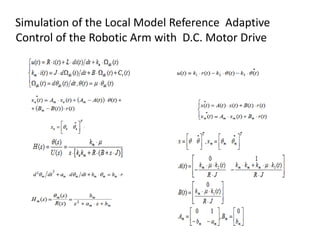
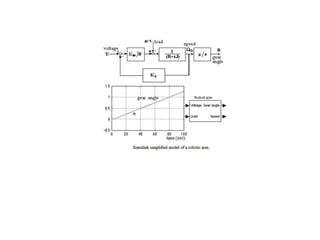
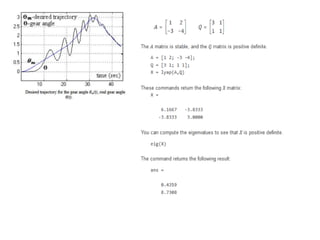
- 14. Simulation of the Local Model Reference Adaptive Control of the Robotic Arm with D.C. Motor Drive
- 21. error parameters Reference input, reference model and gear angle
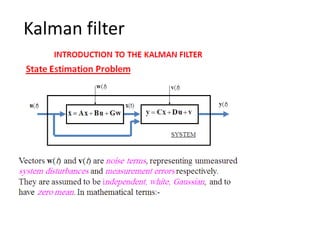
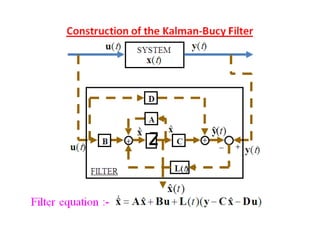
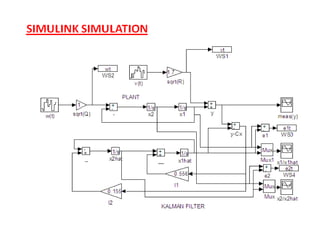
- 22. Kalman filter
- 34. X1 & X2