14 chapter9 graph_algorithmstopologicalsort_shortestpath
1 like180 views

1. The document defines various graph terms including vertices, edges, paths, cycles, connectivity, and graph representations. 2. It discusses topological sorting of directed acyclic graphs (DAGs) which finds an ordering of vertices such that if there is a path from v_i to v_j, then v_j appears after v_i. This can be done in O(|V|+|E|) time. 3. It also covers shortest path algorithms, including ones for unweighted graphs (BFS, O(|V|+|E|)), weighted graphs without negative edges (Dijkstra's algorithm, O(|E|log|V|)), and weighted graphs allowing negative




![5
Representation of Graphs - I
• One simple way is to use a two-
dimensional array (adjacency matrix
representation). If vertices are numbered
starting at 1, A[u][v]=true if (u, v) є E.
Space requirement is Θ(|V|2).
• If the graph is not dense (sparse),
adjacency lists may be used. The space
requirement is O(|E|+|V|).](https://image.slidesharecdn.com/14chapter9graphalgorithmstopologicalsortshortestpath-181027235952/85/14-chapter9-graph_algorithmstopologicalsort_shortestpath-5-320.jpg)




![10
Shortest-Path Algorithms
• The input is a weighted graph: associated
with each edge (vi, vj) is a cost ci,j. The
cost of a path v1v2...vN is ∑ci,i+1 for i in
[1..N-1]. This is weighted path length, the
unweighted path length on the other
hand is merely the number of edges on
the path, namely, N-1.
• Single-source Shortest-Path Problem:
Given as input a weighted graph G=(V, E),
and a distinguished vertex, s, find the
shortest weighted path from s to every
other vertex in G.](https://image.slidesharecdn.com/14chapter9graphalgorithmstopologicalsortshortestpath-181027235952/85/14-chapter9-graph_algorithmstopologicalsort_shortestpath-10-320.jpg)















14 chapter9 graph_algorithmstopologicalsort_shortestpath
- 1. 1 Chapter 9: Graphs (Topological Sort & Shortest Path Algorithms) Text: Read Weiss, §9.1 – 9.3
- 2. 2 Definitions - I • A graph G=(V, E) consists of a set of vertices, V, and a set of edges, E. • Each edge is a pair (v, w), where v, w є V. • If the pair is ordered then G is directed (digraph). • Vertex w is adjacent to v iff (v, w) є E. • In an undirected graph with edge (v, w), w is adjacent to v and v is adjacent to w. • Sometimes an edge has a third component, weight or cost.
- 3. 3 Definitions - II • A path in a graph is w1, w2,...,wN such that (wi, wi+1) є E for 1≤i<N. The length of such a path is the number of edges on the path. If a path from a vertex to itself contains no edges, then the path length is zero. If G contains an edge (v, v), then the path v, v is called a loop. • A simple path is a path such that all vertices are distinct, except that the first and the last could be the same.
- 4. 4 Definitions - III • A cycle in a directed graph is a path of length at least 1 such that w1=wN. This cycle is simple if the path is simple. For undirected graphs, the edges are required to be distinct (Why?). • A directed graph is acyclic if it has no cycles (DAG). • An undirected graph is connected if there is a path from every vertex to every other vertex. A directed graph with this property is called strongly connected. If directed graph is not, but underlying undirected graph is, it is weakly connected. A complete graph is a graph in which there is an edge between every pair of vertices.
- 5. 5 Representation of Graphs - I • One simple way is to use a two- dimensional array (adjacency matrix representation). If vertices are numbered starting at 1, A[u][v]=true if (u, v) є E. Space requirement is Θ(|V|2). • If the graph is not dense (sparse), adjacency lists may be used. The space requirement is O(|E|+|V|).
- 6. 6 Representation of Graphs - II
- 7. 7 Topological Sort - I •A topological sort is an ordering of vertices in a DAG, such that if there is path from vi to vj, then vj appears after vi in the ordering. •A simple algorithm to find a topological ordering is first to find any vertex with no incoming edges. We can then print this vertex, and remove it, along with its edges. Then apply the same strategy to the rest of the graph. To formalize this, define the indegree of a vertex v as the number of edges (u, v).
- 8. 8 Topological Sort – Initial Attempt • running time of the algorithm is O(|V|2).
- 9. 9 • We can remove the inefficiency by keeping all the unassigned vertices of indegree 0 in a special data structure (queue or stack). When a new vertex with degree zero is needed, it is returned by removing one from the queue, and when the indegrees of adjacent vertices are decremented, they are inserted into the queue if the indegree falls to zero. The running time is O(|E|+|V|) Topological Sort – A Better Algorithm
- 10. 10 Shortest-Path Algorithms • The input is a weighted graph: associated with each edge (vi, vj) is a cost ci,j. The cost of a path v1v2...vN is ∑ci,i+1 for i in [1..N-1]. This is weighted path length, the unweighted path length on the other hand is merely the number of edges on the path, namely, N-1. • Single-source Shortest-Path Problem: Given as input a weighted graph G=(V, E), and a distinguished vertex, s, find the shortest weighted path from s to every other vertex in G.
- 11. Shortest-Path Algorithms (cont.) 11 • In the graph below, the shortest path from v1 to v6 has a cost of 6 and the path itself is v1v4v7v6. The shortest unweighted path has 2 edges.
- 12. Negative Cost Cycles 12 • In the graph shown, we have a negative cost. The path from v5 to v4 has cost 1, but a shorter path exists by following the loop v5v4v2v5v4 which has cost -5. This path is still not the shortest, because we could stay in the loop arbitrarily long.
- 13. Shortest Path Length: Problems We will examine 4 algorithms to solve four versions of the problem 1.Unweighted shortest path O(|E|+|V|) 2.Weighted shortest path without negative edges O(|E|log|V|) using queues 3.Weighted shortest path with negative edges O(|E| . |V|) 4.Weighted shortest path of acyclic graphs linear time 13
- 14. Unweighted Shortest Paths • Using some vertex, s, which is an input parameter, find the shortest path from s to all other vertices in an unweighted graph. Assume s=v3. 14
- 15. Unweighted Shortest Paths • Algorithm: find vertices that are at distance 1, 2, ... N-1 by processing vertices in layers (breadth-first search) 15
- 17. Unweighted Shortest Paths • Complexity O(|V|2) 17
- 18. Unweighted Shortest Paths - Improvement • At any point in time there are only two types of unknown vertices that have dv≠∞. Some have dv = currDist and the rest have dv = currDist +1. • We can make use of a queue data structure. • O(|E|+|V|) 18
- 19. Weighted Shortest Path Dijkstra’s Algorithm • With weighted shortest path,distance dv is tentative. It turns out to be the shortest path length from s to v using only known vertices as intermediates. • Greedy algorithm: proceeds in stages doing the best at each stage. Dijkstra’s algorithm selects a vertex v with smallest dv among all unknown vertices and declares it known. Remainder of the stage consists of updating the values dw for all edges (v, w). 19
- 20. Dijkstra’s Algorithm - Example 20 ► ► ►
- 21. Dijkstra’s Algorithm - Example • A proof by contradiction will show that this algorithm always works as long as no edge has a negative cost. 21 ► ► ► ►
- 22. Dijkstra’s Algorithm - Pseudocode • If the vertices are sequentially scanned to find minimum dv, each phase will take O(|V|) to find the minimum, thus O(|V|2) over the course of the algorithm. • The time for updates is constant and at most one update per edge for a total of O(|E|). • Therefore the total time spent is O(|V|2+|E|). • If the graph is dense, OPTIMAL. 22
- 23. Dijkstra’s Algorithm-What if the graph is sparse? • If the graph is sparse |E|=θ(|V|), algorithm is too slow. The distances of vertices need to be kept in a priority queue. • Selection of vertex with minimum distance via deleteMin, and updates via decreaseKey operation. Hence; O(|E|log|V|+|V|log|V|) • find operations are not supported, so you need to be able to maintain locations of di in the heap and update them as they change. • Alternative: insert w and dw with every update. 23
- 24. Graphs with negative edge costs • Dijkstra’s algorithm does not work with negative edge costs. Once a vertex u is known, it is possible that from some other unknown vertex v, there is a path back to u that is very negative. • Algorithm: A combination of weighted and unweighted algorithms. Forget about the concept of known vertices. 24
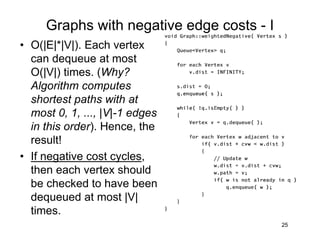
- 25. Graphs with negative edge costs - I • O(|E|*|V|). Each vertex can dequeue at most O(|V|) times. (Why? Algorithm computes shortest paths with at most 0, 1, ..., |V|-1 edges in this order). Hence, the result! • If negative cost cycles, then each vertex should be checked to have been dequeued at most |V| times. 25
- 26. Acyclic Graphs • If the graph is known to be acyclic, the order in which vertices are declared known, can be set to be the topological order. • Running time = O(|V|+|E|) • This selection rule works because when a vertex is selected, its distance can no longer be lowered, since by topological ordering rule it has no incoming edges emanating from unknown nodes. 26