Control system bode plot
0 likes151 views

The document provides an overview of Bode plots used in control systems, detailing frequency response specifications, including bandwidth, cut-off frequency, gain cross over frequency, and margin definitions. It elaborates on the factors included in transfer functions and their representation in Bode plots such as magnitude and phase. Several equations and examples are presented to illustrate the concepts and practical applications of these parameters.

























































































































































































































Control system bode plot
- 1. Control System Bode Plot Nilesh Bhaskarrao Bahadure nbahadure@gmail.com https://www.sites.google.com/site/nileshbbahadure/home June 30, 2021 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 1 / 51
- 2. Overview I 1 Frequency Response Specifications Band Width Cut off Frequency 2 Bode Plot of Transfer Function Bode gain of factor K1 Poles at origin Zeros at origin First Order Poles First Order Zeros Second Order Poles Second Order Zeros Summary 3 Steps for solving Bode plots 4 Examples on Bode Plot Example:01 Example:02 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 2 / 51
- 3. Overview II 5 Thank You Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 3 / 51
- 4. Bode Plots Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 4 / 51
- 5. What is Band Width? What is Band Width? Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 5 / 51
- 6. What is Band Width? What is Band Width? It is defined as the range of frequencies over which the system will respond satisfactorily Figure : Closed loop system Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 5 / 51
- 7. What is Band Width? What is Band Width? It is defined as the range of frequencies over which the system will respond satisfactorily Figure : Closed loop system from Figure 1 the range o to ωb is nothing but band width. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 5 / 51
- 8. What Cut-off Frequency (wb)? Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 6 / 51
- 9. What Cut-off Frequency (wb)? The frequency at which the magnitude of the closed loop response is 3dB down from its zero frequency value is called cut-off frequency. What Cut-off Rate? Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 6 / 51
- 10. What Cut-off Frequency (wb)? The frequency at which the magnitude of the closed loop response is 3dB down from its zero frequency value is called cut-off frequency. What Cut-off Rate? The slope of resultant magnitude curve near the cut-off frequency is called cut-off rate. What Resonant Peak (Mr)? Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 6 / 51
- 11. What Cut-off Frequency (wb)? The frequency at which the magnitude of the closed loop response is 3dB down from its zero frequency value is called cut-off frequency. What Cut-off Rate? The slope of resultant magnitude curve near the cut-off frequency is called cut-off rate. What Resonant Peak (Mr)? It is maximum value of magnitude of closed loop frequency response What Resonant Frequency (Wr)? Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 6 / 51
- 12. What Cut-off Frequency (wb)? The frequency at which the magnitude of the closed loop response is 3dB down from its zero frequency value is called cut-off frequency. What Cut-off Rate? The slope of resultant magnitude curve near the cut-off frequency is called cut-off rate. What Resonant Peak (Mr)? It is maximum value of magnitude of closed loop frequency response What Resonant Frequency (Wr)? The frequency at which resonant peak occur. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 6 / 51
- 13. Gain Cross Over Frequency ωgc Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 7 / 51
- 14. Gain Cross Over Frequency ωgc The frequency at which magnitude of G(jω).H(jω) is unity i.e. 1 is called gain cross over frequency. |G(jω).H(jω)| = 1 (1) in dB, 20log10|G(jω).H(jω)| = 20log101 = 0dB (2) Phase Cross Over Frequency ωpc Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 7 / 51
- 15. Gain Cross Over Frequency ωgc The frequency at which magnitude of G(jω).H(jω) is unity i.e. 1 is called gain cross over frequency. |G(jω).H(jω)| = 1 (1) in dB, 20log10|G(jω).H(jω)| = 20log101 = 0dB (2) Phase Cross Over Frequency ωpc The frequency at which phase angle of G(jω).H(jω) is −180o is called phase cross over frequency ωpc. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 7 / 51
- 16. Gain Margin (GM) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 8 / 51
- 17. Gain Margin (GM) It is defined as the magnitude of the reciprocal of the closed loop transfer function, evaluate at the phase cross over frequency ωpc which is the frequency at which phase is −180o. That is, Gain Margin (GM) = 1 |G(jω).H(jω)| (3) where, ∠G(jω).H(jω) = −180o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 8 / 51
- 18. Figure : Closed loop Gain and Phase Margin Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 9 / 51
- 19. Phase Margin (PM) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 10 / 51
- 20. Phase Margin (PM) It is defined as 180o plus the phase angle φ of the open loop transfer function at unity gain i.e. φPM = 180 + ∠G(jω).H(jω) (4) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 10 / 51
- 21. Bode Plot of Transfer Function Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 11 / 51
- 22. Bode Plot of Transfer Function The frequency transfer function can be written in a generalized form as the ratio of polynomials G(s).H(s) = N(s) D(s) = a0sm + a1sm−1 + a2sm−2 + .... b0sn + b1sn−1 + b2sn−2 + .... (5) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 11 / 51
- 23. Bode Plot of Transfer Function The frequency transfer function can be written in a generalized form as the ratio of polynomials G(s).H(s) = N(s) D(s) = a0sm + a1sm−1 + a2sm−2 + .... b0sn + b1sn−1 + b2sn−2 + .... (5) This must be factorized to obtain a general type, G(s).H(s) = N(s) D(s) = K1sg (s + z1)(s + z2).... sh(s + p1)(s + p2).... (6) We convert the above equation in time constant form, G(s).H(s) = N(s) D(s) = K1sg (1 + s z1 )(1 + s z2 ).... sh(1 + s p1 )(1 + s p2 )... (7) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 11 / 51
- 24. Bode Plot of Transfer Function Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 12 / 51
- 25. Bode Plot of Transfer Function Note K1 = Kz1z2 p1p2 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 12 / 51
- 26. Bode Plot of Transfer Function Note K1 = Kz1z2 p1p2 we now put s = jω to convert the transfer function to the frequency domain G(jω).H(jω) = K1jωg (1 + jω z1 )(1 + jω z2 ).... jωh(1 + jω p1 )(1 + jω p2 )... (8) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 12 / 51
- 27. Bode Plot of Transfer Function Note K1 = Kz1z2 p1p2 we now put s = jω to convert the transfer function to the frequency domain G(jω).H(jω) = K1jωg (1 + jω z1 )(1 + jω z2 ).... jωh(1 + jω p1 )(1 + jω p2 )... (8) Here K1 is the gain constant or Bode gain. Equation 8 is the standard form or Bode form. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 12 / 51
- 28. Bode Plot of Transfer Function Note K1 = Kz1z2 p1p2 we now put s = jω to convert the transfer function to the frequency domain G(jω).H(jω) = K1jωg (1 + jω z1 )(1 + jω z2 ).... jωh(1 + jω p1 )(1 + jω p2 )... (8) Here K1 is the gain constant or Bode gain. Equation 8 is the standard form or Bode form. The following is a list of possible factors of G(jω).H(jω) from Equation 8 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 12 / 51
- 29. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 30. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 31. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 32. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 33. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. 5 Finite simple zero at (1 + jω z1 ) or first order zeros. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 34. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. 5 Finite simple zero at (1 + jω z1 ) or first order zeros. 6 Second order poles 1 1+j2ξω−ω2 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 35. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. 5 Finite simple zero at (1 + jω z1 ) or first order zeros. 6 Second order poles 1 1+j2ξω−ω2 7 Second order zeros (1 + j2ξω − ω2) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 36. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. 5 Finite simple zero at (1 + jω z1 ) or first order zeros. 6 Second order poles 1 1+j2ξω−ω2 7 Second order zeros (1 + j2ξω − ω2) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 37. Bode Plot of Transfer Function... 1 Bode gain K1 or constant factor 2 Poles at origin 1 (jω)K of order K 3 Zeros at origin (jω)g of order g 4 Finite simple poles at 1 1+ jω p1 or first order poles. 5 Finite simple zero at (1 + jω z1 ) or first order zeros. 6 Second order poles 1 1+j2ξω−ω2 7 Second order zeros (1 + j2ξω − ω2) Any transfer function will contain a few of the listed several factors. We shall now understand how each of these 7 terms can be represented on the magnitude plot and the phase plot. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 13 / 51
- 38. Bode Plot of Standard Factors Bode gain of factor K1 Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 14 / 51
- 39. Bode Plot of Standard Factors Bode gain of factor K1 Magnitude Plot consider G(s).H(s) = K1, replace s = jω to convert it to frequency domain, therefore G(jω).K(jω) = K1 For the magnitude in dB we use the standard formula 20log10G(jω).H(jω) = 20log10|K1| = MdB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 14 / 51
- 40. Bode Plot of Standard Factors Bode gain of factor K1 Magnitude Plot consider G(s).H(s) = K1, replace s = jω to convert it to frequency domain, therefore G(jω).K(jω) = K1 For the magnitude in dB we use the standard formula 20log10G(jω).H(jω) = 20log10|K1| = MdB This is a straight line independent of the input frequency. Hence we represent the gain factor by a straight line on the Y-axis. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 14 / 51
- 41. Bode Plot of Standard Factors Bode gain of factor K1 Magnitude Plot consider G(s).H(s) = K1, replace s = jω to convert it to frequency domain, therefore G(jω).K(jω) = K1 For the magnitude in dB we use the standard formula 20log10G(jω).H(jω) = 20log10|K1| = MdB This is a straight line independent of the input frequency. Hence we represent the gain factor by a straight line on the Y-axis. Example, Bode magnitude for K1 = 5 will give us a straight line of 20log5 = 13.98dB on the Y-axis. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 14 / 51
- 42. Bode Plot of Standard Factors... Bode gain of factor K1 Phase Plot for Bode gain K1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 15 / 51
- 43. Bode Plot of Standard Factors... Bode gain of factor K1 Phase Plot for Bode gain K1 Since K1 is a constant, it can be written as, G(jω)H(jω) = K1 + j0 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 15 / 51
- 44. Bode Plot of Standard Factors... Bode gain of factor K1 Phase Plot for Bode gain K1 Since K1 is a constant, it can be written as, G(jω)H(jω) = K1 + j0 For finding phase angle in degree we have the equation φ = tan−1 Imaginary Part Real Part φ = tan−1 0 K1 = 0 i.e. for positive value of K1, the phase is zero Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 15 / 51
- 45. Bode Plot of Standard Factors... Bode gain of factor K1 Phase Plot for Bode gain K1 Since K1 is a constant, it can be written as, G(jω)H(jω) = K1 + j0 For finding phase angle in degree we have the equation φ = tan−1 Imaginary Part Real Part φ = tan−1 0 K1 = 0 i.e. for positive value of K1, the phase is zero Hence a positive value of K1 has no effect on the phase. The phase angle is equal to −180o for all ω for negative value of K1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 15 / 51
- 46. Bode Plot of Standard Factors... Bode gain of factor K1 Phase Plot for Bode gain K1 Since K1 is a constant, it can be written as, G(jω)H(jω) = K1 + j0 For finding phase angle in degree we have the equation φ = tan−1 Imaginary Part Real Part φ = tan−1 0 K1 = 0 i.e. for positive value of K1, the phase is zero Hence a positive value of K1 has no effect on the phase. The phase angle is equal to −180o for all ω for negative value of K1 Both magnitude and phase are shown below figure (3). They have been drawn separately for better understanding. In practice magnitude and phase have to be drawn one below the other. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 15 / 51
- 47. Bode Plot of Standard Factors... Figure : Magnitude and Phase plot for gain K1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 16 / 51
- 48. Poles at Origin or Integral factor ( 1 jω )K Poles at Origin or Integral factor ( 1 jω )K Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 17 / 51
- 49. Poles at Origin or Integral factor ( 1 jω )K Poles at Origin or Integral factor ( 1 jω )K Magnitude Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|−K = −20Klog10(ω)dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 17 / 51
- 50. Poles at Origin or Integral factor ( 1 jω )K Poles at Origin or Integral factor ( 1 jω )K Magnitude Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|−K = −20Klog10(ω)dB This is a straight line passing though the point ω = rad/sec and Y = 0dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 17 / 51
- 51. Poles at Origin or Integral factor ( 1 jω )K Poles at Origin or Integral factor ( 1 jω )K Magnitude Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|−K = −20Klog10(ω)dB This is a straight line passing though the point ω = rad/sec and Y = 0dB This is because at ω = 1rad/sec, Y = −20Klog10(ω)dB = −20Klog10(0)dB = 0dB 1 If K = 1 straight line passes through (0 dB, ω = 1), at slope −20db/dec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 17 / 51
- 52. Poles at Origin or Integral factor ( 1 jω )K Poles at Origin or Integral factor ( 1 jω )K Magnitude Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|−K = −20Klog10(ω)dB This is a straight line passing though the point ω = rad/sec and Y = 0dB This is because at ω = 1rad/sec, Y = −20Klog10(ω)dB = −20Klog10(0)dB = 0dB 1 If K = 1 straight line passes through (0 dB, ω = 1), at slope −20db/dec 2 If K = 2 straight line passes through (0 dB, ω = 1), at slope −40db/dec and so on. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 17 / 51
- 53. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 54. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 55. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 56. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K For K = 1, ∠G.H(jω) = ∠ 1 jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 57. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K For K = 1, ∠G.H(jω) = ∠ 1 jω = ∠ 1 + j0 0 + jω = tan−1 0 1 tan−1 ω 0 = 0 tan−1∞ = 0 90o = −90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 58. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K For K = 1, ∠G.H(jω) = ∠ 1 jω = ∠ 1 + j0 0 + jω = tan−1 0 1 tan−1 ω 0 = 0 tan−1∞ = 0 90o = −90o ∠G.H(jω) = ∠ 1 (jω)K = 1 jω + 1 jω + ... + 1 jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 59. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K For K = 1, ∠G.H(jω) = ∠ 1 jω = ∠ 1 + j0 0 + jω = tan−1 0 1 tan−1 ω 0 = 0 tan−1∞ = 0 90o = −90o ∠G.H(jω) = ∠ 1 (jω)K = 1 jω + 1 jω + ... + 1 jω Each term is pole at origin Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 60. Poles at Origin or Integral factor ( 1 jω )K Phase Plot Consider G(s).H(s) = 1 sK , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 (jω)K = (jω)−K For K = 1, ∠G.H(jω) = ∠ 1 jω = ∠ 1 + j0 0 + jω = tan−1 0 1 tan−1 ω 0 = 0 tan−1∞ = 0 90o = −90o ∠G.H(jω) = ∠ 1 (jω)K = 1 jω + 1 jω + ... + 1 jω Each term is pole at origin ∠G.H(jω) = ∠ 1 (jω)K = 1 + j0 0 + jω + 1 + j0 0 + jω + ... + 1 + j0 0 + jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 18 / 51
- 61. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 62. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... We now find phase φ for each term φ = 0 90 + 0 90 + 0 90 + .... + 0 90 φ = −90o + (−90o ) + (−90o ) + .... + (−90o ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 63. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... We now find phase φ for each term φ = 0 90 + 0 90 + 0 90 + .... + 0 90 φ = −90o + (−90o ) + (−90o ) + .... + (−90o ) Hence each pole at origin contributes a phase of −90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 64. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... We now find phase φ for each term φ = 0 90 + 0 90 + 0 90 + .... + 0 90 φ = −90o + (−90o ) + (−90o ) + .... + (−90o ) Hence each pole at origin contributes a phase of −90o Hence if we have 1 pole at the origin, the phase φ = −90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 65. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... We now find phase φ for each term φ = 0 90 + 0 90 + 0 90 + .... + 0 90 φ = −90o + (−90o ) + (−90o ) + .... + (−90o ) Hence each pole at origin contributes a phase of −90o Hence if we have 1 pole at the origin, the phase φ = −90o if we have 2 pole at the origin, the phase φ = −180o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 66. Poles at Origin or Integral factor ( 1 jω )K Phase Plot... We now find phase φ for each term φ = 0 90 + 0 90 + 0 90 + .... + 0 90 φ = −90o + (−90o ) + (−90o ) + .... + (−90o ) Hence each pole at origin contributes a phase of −90o Hence if we have 1 pole at the origin, the phase φ = −90o if we have 2 pole at the origin, the phase φ = −180o if we have 3 pole at the origin, the phase φ = −270o and so on Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 19 / 51
- 67. Zeros at Origin or Derivative factor (jω)g Zeros at Origin or Derivative factor (jω)g Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 20 / 51
- 68. Zeros at Origin or Derivative factor (jω)g Zeros at Origin or Derivative factor (jω)g Magnitude Plot Consider G(s).H(s) = (sg ), replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|g = 20glog10(ω)dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 20 / 51
- 69. Zeros at Origin or Derivative factor (jω)g Zeros at Origin or Derivative factor (jω)g Magnitude Plot Consider G(s).H(s) = (sg ), replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|g = 20glog10(ω)dB This is a plot of slope of 20gdB/dec 1 For g = 1 straight line passes through (0 dB, ω = 1), at slope +20db/dec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 20 / 51
- 70. Zeros at Origin or Derivative factor (jω)g Zeros at Origin or Derivative factor (jω)g Magnitude Plot Consider G(s).H(s) = (sg ), replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10|(jω)|g = 20glog10(ω)dB This is a plot of slope of 20gdB/dec 1 For g = 1 straight line passes through (0 dB, ω = 1), at slope +20db/dec 2 For g = 2 straight line passes through (0 dB, ω = 1), at slope +40db/dec and so on. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 20 / 51
- 71. Zeros at Origin or Derivative factor (jω)g Phase Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 72. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 73. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 74. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g For g = 1, ∠G.H(jω) = ∠jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 75. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g For g = 1, ∠G.H(jω) = ∠jω = ∠0 + jω = tan−1 ω 0 = 90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 76. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g For g = 1, ∠G.H(jω) = ∠jω = ∠0 + jω = tan−1 ω 0 = 90o ∠G.H(jω) = ∠(jω)g = jω + jω + ... + jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 77. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g For g = 1, ∠G.H(jω) = ∠jω = ∠0 + jω = tan−1 ω 0 = 90o ∠G.H(jω) = ∠(jω)g = jω + jω + ... + jω Each term is zero at origin Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 78. Zeros at Origin or Derivative factor (jω)g Phase Plot Consider G(s).H(s) = sg , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = (jω)g For g = 1, ∠G.H(jω) = ∠jω = ∠0 + jω = tan−1 ω 0 = 90o ∠G.H(jω) = ∠(jω)g = jω + jω + ... + jω Each term is zero at origin ∠G.H(jω) = ∠(jω)K = 0 + jω + 0 + jω + ... + 0 + jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 21 / 51
- 79. Zeros at Origin or Derivative factor (jω)g Phase Plot... Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 80. Zeros at Origin or Derivative factor (jω)g Phase Plot... We now find phase φ for each term φ = 90o + 90o + 90o + .... + 90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 81. Zeros at Origin or Derivative factor (jω)g Phase Plot... We now find phase φ for each term φ = 90o + 90o + 90o + .... + 90o Hence each zero at origin contributes a phase of 90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 82. Zeros at Origin or Derivative factor (jω)g Phase Plot... We now find phase φ for each term φ = 90o + 90o + 90o + .... + 90o Hence each zero at origin contributes a phase of 90o Hence if we have 1 zero at the origin, the phase φ = 90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 83. Zeros at Origin or Derivative factor (jω)g Phase Plot... We now find phase φ for each term φ = 90o + 90o + 90o + .... + 90o Hence each zero at origin contributes a phase of 90o Hence if we have 1 zero at the origin, the phase φ = 90o if we have 2 zero at the origin, the phase φ = 180o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 84. Zeros at Origin or Derivative factor (jω)g Phase Plot... We now find phase φ for each term φ = 90o + 90o + 90o + .... + 90o Hence each zero at origin contributes a phase of 90o Hence if we have 1 zero at the origin, the phase φ = 90o if we have 2 zero at the origin, the phase φ = 180o if we have 3 zero at the origin, the phase φ = 270o and so on Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 22 / 51
- 85. Zeros at Origin or Derivative factor (jω)g ... Figure : Magnitude plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 23 / 51
- 86. First Order Poles 1 1+jω p1 First Order Poles 1 1+jω p1 Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 24 / 51
- 87. First Order Poles 1 1+jω p1 First Order Poles 1 1+jω p1 Magnitude Plot Consider G(s).H(s) = 1 1+ s p1 , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 1+ jω p1 Since the magnitude is plotted in decibel dB we have Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 24 / 51
- 88. First Order Poles 1 1+jω p1 First Order Poles 1 1+jω p1 Magnitude Plot Consider G(s).H(s) = 1 1+ s p1 , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 1+ jω p1 Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10| 1 1 + jω p1 | = 20log10( 1 q 12 + ω2 p2 1 )dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 24 / 51
- 89. First Order Poles 1 1+jω p1 First Order Poles 1 1+jω p1 Magnitude Plot Consider G(s).H(s) = 1 1+ s p1 , replace s = jω to convert it to frequency domain, therefore G(jω).H(jω) = 1 1+ jω p1 Since the magnitude is plotted in decibel dB we have 20log10G(jω).H(jω) = 20log10| 1 1 + jω p1 | = 20log10( 1 q 12 + ω2 p2 1 )dB 20log10G(jω).H(jω) = −20log10 s 12 + ω2 p2 1 dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 24 / 51
- 90. First Order Poles 1 1+jω p1 Magnitude Plot... Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 25 / 51
- 91. First Order Poles 1 1+jω p1 Magnitude Plot... We consider range of ω 1 The graph has a slope of 0 db for ω p1 << 1 i.e. ω < p1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 25 / 51
- 92. First Order Poles 1 1+jω p1 Magnitude Plot... We consider range of ω 1 The graph has a slope of 0 db for ω p1 << 1 i.e. ω < p1 2 The graph has a slope of -20 db for ω p1 >> 1 i.e. ω > p1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 25 / 51
- 93. First Order Poles 1 1+jω p1 Magnitude Plot... We consider range of ω 1 The graph has a slope of 0 db for ω p1 << 1 i.e. ω < p1 2 The graph has a slope of -20 db for ω p1 >> 1 i.e. ω > p1 3 The change slope occurs at −ω p1 = 1 i.e. ω = p1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 25 / 51
- 94. Videos on LaTeX, CorelDraw and Many More Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 26 / 51
- 95. First Order Poles 1 1+jω p1 Phase Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 96. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 97. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 G(jω).H(jω) = 1 + j0 1 + jω p1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 98. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 G(jω).H(jω) = 1 + j0 1 + jω p1 ∠GH(jω) = tan−1 (0 1 ) tan−1( ω p1 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 99. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 G(jω).H(jω) = 1 + j0 1 + jω p1 ∠GH(jω) = tan−1 (0 1 ) tan−1( ω p1 ) ∠GH(jω) = 0 tan−1( ω p1 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 100. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 G(jω).H(jω) = 1 + j0 1 + jω p1 ∠GH(jω) = tan−1 (0 1 ) tan−1( ω p1 ) ∠GH(jω) = 0 tan−1( ω p1 ) ∠GH(jω) = −tan−1 ( ω p1 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 101. First Order Poles 1 1+jω p1 Phase Plot G(jω).H(jω) = 1 1 + jω p1 G(jω).H(jω) = 1 + j0 1 + jω p1 ∠GH(jω) = tan−1 (0 1 ) tan−1( ω p1 ) ∠GH(jω) = 0 tan−1( ω p1 ) ∠GH(jω) = −tan−1 ( ω p1 ) As ω becomes larger the phase angle value approaches −90o Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 27 / 51
- 102. First Order Poles 1 + jω z1 First Order Poles 1 + jω z1 Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 28 / 51
- 103. First Order Poles 1 + jω z1 First Order Poles 1 + jω z1 Magnitude Plot The analysis has the same treatment as first order poles 1 For all ω ≤ z1 we obtain a straight line of -20 dB/dec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 28 / 51
- 104. First Order Poles 1 + jω z1 First Order Poles 1 + jω z1 Magnitude Plot The analysis has the same treatment as first order poles 1 For all ω ≤ z1 we obtain a straight line of -20 dB/dec 2 For all ω > z1 we obtain a straight line of +20 dB/dec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 28 / 51
- 105. First Order Poles 1 + jω z1 First Order Poles 1 + jω z1 Magnitude Plot The analysis has the same treatment as first order poles 1 For all ω ≤ z1 we obtain a straight line of -20 dB/dec 2 For all ω > z1 we obtain a straight line of +20 dB/dec 3 The change of slope occurs at ω = z1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 28 / 51
- 106. First Order Poles 1 + jω z1 Phase Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 29 / 51
- 107. First Order Poles 1 + jω z1 Phase Plot G(jω).H(jω) = 1 + jω z1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 29 / 51
- 108. First Order Poles 1 + jω z1 Phase Plot G(jω).H(jω) = 1 + jω z1 ∠GH(jω) = tan−1 ( ω z1 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 29 / 51
- 109. First Order Poles 1 + jω z1 Phase Plot G(jω).H(jω) = 1 + jω z1 ∠GH(jω) = tan−1 ( ω z1 ) To put the phase, we take different values of ω starting from 0.1 rad/sec and compute the angle. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 29 / 51
- 110. First Order Poles 1 + jω z1 ... Figure : Magnitude plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 30 / 51
- 111. Second Order Poles Second Order Poles Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 112. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 113. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Put s = jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 114. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Put s = jω GH(jω) = ω2 n (jω)2 + 2ξωn(jω) + ω2 n Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 115. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Put s = jω GH(jω) = ω2 n (jω)2 + 2ξωn(jω) + ω2 n GH(jω) = ω2 n 1 − ( ω ωn )2 + 2jξ ω ωn M = |GH(jω)| = 1 q (1 − ω ωn )2 + (2ξ ω ωn )2 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 116. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Put s = jω GH(jω) = ω2 n (jω)2 + 2ξωn(jω) + ω2 n GH(jω) = ω2 n 1 − ( ω ωn )2 + 2jξ ω ωn M = |GH(jω)| = 1 q (1 − ω ωn )2 + (2ξ ω ωn )2 As GH(ω) is a second order pole, approximate Bode magnitude plot is shown 1 0 dB line for ω < ωn Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 117. Second Order Poles Second Order Poles Magnitude Plot GH(s) = ω2 n s2 + 2ξωns + ω2 n Put s = jω GH(jω) = ω2 n (jω)2 + 2ξωn(jω) + ω2 n GH(jω) = ω2 n 1 − ( ω ωn )2 + 2jξ ω ωn M = |GH(jω)| = 1 q (1 − ω ωn )2 + (2ξ ω ωn )2 As GH(ω) is a second order pole, approximate Bode magnitude plot is shown 1 0 dB line for ω < ωn 2 -40 db/dec line for ω > ωn Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 31 / 51
- 118. Second Order Poles Phase Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 32 / 51
- 119. Second Order Poles Phase Plot ∠G(jω).H(jω) = φ = tan−1 (0 1 ) tan−1( 2ξ ω ωn 1−( ω ωn )2 ) φ = −tan−1 " 2ξ ω ωn 1 − ( ω ωn )2 # Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 32 / 51
- 120. Second Order Zeros Second Order Zeros Magnitude Plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 33 / 51
- 121. Second Order Zeros Second Order Zeros Magnitude Plot GH(jω) = 1 − ( ω ωn )2 + 2jξ ω ωn 1 0 dB line for ω < ωn Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 33 / 51
- 122. Second Order Zeros Second Order Zeros Magnitude Plot GH(jω) = 1 − ( ω ωn )2 + 2jξ ω ωn 1 0 dB line for ω < ωn 2 +40 db/dec line for ω > ωn Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 33 / 51
- 123. Second Order Zeros Phase Plot φ = tan−1 " 2ξ ω ωn 1 − ( ω ωn )2 # Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 34 / 51
- 124. Second Order Zeros... Figure : Magnitude plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 35 / 51
- 125. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 126. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 127. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 128. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 129. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 130. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 ’n’ poles at origin 1 (jω)n -20n −20nlog(ω) -90n or 270n Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 131. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 ’n’ poles at origin 1 (jω)n -20n −20nlog(ω) -90n or 270n Simple zero 1 + jωr 20 0 for ω < 1 r 0 for ω < 1 r 20logωr for ω > 1 r 90 for ω > 1 r Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 132. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 ’n’ poles at origin 1 (jω)n -20n −20nlog(ω) -90n or 270n Simple zero 1 + jωr 20 0 for ω < 1 r 0 for ω < 1 r 20logωr for ω > 1 r 90 for ω > 1 r Simple pole 1 1+jωr -20 0 for ω < 1 r 0 for ω < 1 r −20logωr for ω > 1 r -90 or 270 for ω > 1 r Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 133. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 ’n’ poles at origin 1 (jω)n -20n −20nlog(ω) -90n or 270n Simple zero 1 + jωr 20 0 for ω < 1 r 0 for ω < 1 r 20logωr for ω > 1 r 90 for ω > 1 r Simple pole 1 1+jωr -20 0 for ω < 1 r 0 for ω < 1 r −20logωr for ω > 1 r -90 or 270 for ω > 1 r Second order deriva- tive term ω2 n(1 − ω2 ω2 n + 2jξω ωn ) 40 40logωn for ω < ωn 0 for ω < ωn 20log(2ξω2 n) for ω = ωn 90 for ω = ωn 40logω for ω > ωn 180 for ω > ωn Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 134. Summary of Bode Parameters Type of term G(jω)H(jω) Slope(dB/dec) Magnitude (dB) Phase an- gle(degrees) Constant K 0 20logK 0 Zero at origin jω 20 20log(ω) 90 ’n’ zeros at origin (jω)n 20n 20nlog(ω) 90n Pole at origin 1 jω -20 −20log(ω) -90 or 270 ’n’ poles at origin 1 (jω)n -20n −20nlog(ω) -90n or 270n Simple zero 1 + jωr 20 0 for ω < 1 r 0 for ω < 1 r 20logωr for ω > 1 r 90 for ω > 1 r Simple pole 1 1+jωr -20 0 for ω < 1 r 0 for ω < 1 r −20logωr for ω > 1 r -90 or 270 for ω > 1 r Second order deriva- tive term ω2 n(1 − ω2 ω2 n + 2jξω ωn ) 40 40logωn for ω < ωn 0 for ω < ωn 20log(2ξω2 n) for ω = ωn 90 for ω = ωn 40logω for ω > ωn 180 for ω > ωn Second order integral term 1 ω2 n(1− ω2 ω2 n + 2jξω ωn ) -40 −40logωn for ω < ωn 0 for ω < ωn −20log(2ξω2 n) for ω = ωn -90 for ω = ωn −40logω for ω > ωn -180 for ω > ωn Table : Bode Parameters Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 36 / 51
- 135. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 136. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 137. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 138. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors 4 Prepare the table for magnitude plot Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 139. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors 4 Prepare the table for magnitude plot 5 Choose suitable Y and X scales for magnitude plot. Draw the lines of corresponding factors from starting point to corner frequency (end point) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 140. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors 4 Prepare the table for magnitude plot 5 Choose suitable Y and X scales for magnitude plot. Draw the lines of corresponding factors from starting point to corner frequency (end point) 6 Write the phase angle equation corresponding to the phase of each factor present Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 141. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors 4 Prepare the table for magnitude plot 5 Choose suitable Y and X scales for magnitude plot. Draw the lines of corresponding factors from starting point to corner frequency (end point) 6 Write the phase angle equation corresponding to the phase of each factor present 7 Prepare the phase angle table & obtain the resultant phase angle by actual calculation Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 142. Steps for solving Bode plots: 1 Bring the given G(s).H(s) transfer function in to standard time constant form 2 Replace all s by jω to get the frequency domain transfer function 3 Prepare a list of standard factor present in the given transfer function and prepare tables for factors 4 Prepare the table for magnitude plot 5 Choose suitable Y and X scales for magnitude plot. Draw the lines of corresponding factors from starting point to corner frequency (end point) 6 Write the phase angle equation corresponding to the phase of each factor present 7 Prepare the phase angle table & obtain the resultant phase angle by actual calculation 8 Depending upon largest frequency term present, choose the starting point of log scale. Plot the points as per phase angle table φ & draw the smooth curve to obtain the phase angle plot. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 37 / 51
- 143. Steps for solving Bode plots:... Note: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 38 / 51
- 144. Steps for solving Bode plots:... Note: Consider the starting frequency of the Bode plot as 1 10th of the minimum corner frequency or 0.1 rad/sec whichever is smaller value and draw the Bode plot upto 10 times maximum corner frequency. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 38 / 51
- 145. Example: 01 Example: A unity feedback control system has G(s) = 100 s(s + 0.5)(s + 10) Draw the Bode plot and determine GM, PM, ωgc, and ωpc Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 39 / 51
- 146. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 147. Solution: Step 1: Bring equation in standard form: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 148. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 149. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 150. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 20 jω(1 + jω 0.5 )(1 + jω 10 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 151. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 20 jω(1 + jω 0.5 )(1 + jω 10 ) Step 3: The following factors are present: 1 Constant K = 20 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 152. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 20 jω(1 + jω 0.5 )(1 + jω 10 ) Step 3: The following factors are present: 1 Constant K = 20 2 Poles at origin 1 jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 153. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 20 jω(1 + jω 0.5 )(1 + jω 10 ) Step 3: The following factors are present: 1 Constant K = 20 2 Poles at origin 1 jω 3 First order pole 1 1+ jω 0.5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
- 154. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 0.5 × 10 × s(1 + s 0.5 )(1 + s 10 ) = 20 s(1 + s 0.5 )(1 + s 10 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 20 jω(1 + jω 0.5 )(1 + jω 10 ) Step 3: The following factors are present: 1 Constant K = 20 2 Poles at origin 1 jω 3 First order pole 1 1+ jω 0.5 4 First order pole 1 1+ jω 10 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 40 / 51
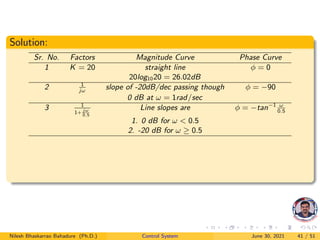
- 155. Solution: Sr. No. Factors Magnitude Curve Phase Curve Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 41 / 51
- 156. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 20 straight line φ = 0 20log1020 = 26.02dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 41 / 51
- 157. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 20 straight line φ = 0 20log1020 = 26.02dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 41 / 51
- 158. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 20 straight line φ = 0 20log1020 = 26.02dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec 3 1 1+ jω 0.5 Line slopes are φ = −tan−1 ω 0.5 1. 0 dB for ω < 0.5 2. -20 dB for ω ≥ 0.5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 41 / 51
- 159. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 20 straight line φ = 0 20log1020 = 26.02dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec 3 1 1+ jω 0.5 Line slopes are φ = −tan−1 ω 0.5 1. 0 dB for ω < 0.5 2. -20 dB for ω ≥ 0.5 4 1 1+ jω 10 Line slopes are φ = −tan−1 ω 10 1. 0 dB for ω < 10 2. -20 dB for ω ≥ 10 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 41 / 51
- 160. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 161. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 162. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 20 straight line of 26.02 dB 0.1 ∞ Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 163. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 20 straight line of 26.02 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 0.5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 164. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 20 straight line of 26.02 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 0.5 3 1 1+ jω 0.5 -20 + (-20) = -40 dB/dec 0.5 10 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 165. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 20 straight line of 26.02 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 0.5 3 1 1+ jω 0.5 -20 + (-20) = -40 dB/dec 0.5 10 4 1 1+ jω 10 -40 + (-20) = -60 dB/dec 10 ∞ Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 42 / 51
- 166. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 167. Solution: Step 5: Phase angle: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 168. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 169. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 170. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 171. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 172. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 173. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 174. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 175. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 5 −90o -84.2 -26.2 -200.7 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 176. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 5 −90o -84.2 -26.2 -200.7 10 −90o -87.1 -45 -222.1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 177. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 5 −90o -84.2 -26.2 -200.7 10 −90o -87.1 -45 -222.1 100 −90o -89.7 -84.2 -263.9 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 178. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 5 −90o -84.2 -26.2 -200.7 10 −90o -87.1 -45 -222.1 100 −90o -89.7 -84.2 -263.9 500 −90o -89.94 -88.8 -268.7 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 179. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 ( ω 0.5 ) − tan−1 ( ω 10 ) ω 1 jω −tan−1 ( ω 0.5 ) −tan−1 ( ω 10 ) φresultant (ω) 0.1 −90o -11.3 -0.5 -101.8 0.5 −90o -45 -2.8 -137.8 1 −90o -63.4 -5.7 -159.1 2 −90o -75.96 -11.3 -177.2 3 −90o -80.53 -16.6 -187.13 4 −90o -82.87 -21.8 -194.67 5 −90o -84.2 -26.2 -200.7 10 −90o -87.1 -45 -222.1 100 −90o -89.7 -84.2 -263.9 500 −90o -89.94 -88.8 -268.7 1000 −90o -89.97 -89.4 -289.3 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 43 / 51
- 180. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 44 / 51
- 181. Example: 02 Example: A feedback control system has G(s)H(s) = 100(s + 3) s(s + 1)(s + 5) Draw the Bode plot and comments on stability Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 45 / 51
- 182. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 183. Solution: Step 1: Bring equation in standard form: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 184. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 185. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 186. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 187. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Step 3: The following factors are present: 1 Constant K = 60 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 188. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Step 3: The following factors are present: 1 Constant K = 60 2 Poles at origin 1 jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 189. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Step 3: The following factors are present: 1 Constant K = 60 2 Poles at origin 1 jω 3 First order pole 1 1+jω Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 190. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Step 3: The following factors are present: 1 Constant K = 60 2 Poles at origin 1 jω 3 First order pole 1 1+jω 4 First order pole 1 1+ jω 5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 191. Solution: Step 1: Bring equation in standard form: G(s).H(s) = 100 × 3(1 + s 3 ) 5 × s(1 + s)(1 + s 5 ) = 60(1 + s 3 ) s(1 + s)(1 + s 5 ) Step 2: Convert to frequency domain by replacing s = jω G(jω).H(jω) = 60(1 + jω 3 ) jω(1 + jω)(1 + jω 5 ) Step 3: The following factors are present: 1 Constant K = 60 2 Poles at origin 1 jω 3 First order pole 1 1+jω 4 First order pole 1 1+ jω 5 5 First order zero 1 + jω 3 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 46 / 51
- 192. Solution: Sr. No. Factors Magnitude Curve Phase Curve Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 193. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 60 straight line φ = 0 20log1060 = 35.56dB Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 194. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 60 straight line φ = 0 20log1060 = 35.56dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 195. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 60 straight line φ = 0 20log1060 = 35.56dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec 3 1 1+jω Line slopes are φ = −tan−1 (ω) 1. 0 dB for ω < 1 2. -20 dB for ω ≥ 1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 196. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 60 straight line φ = 0 20log1060 = 35.56dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec 3 1 1+jω Line slopes are φ = −tan−1 (ω) 1. 0 dB for ω < 1 2. -20 dB for ω ≥ 1 4 1 1+ jω 5 Line slopes are φ = −tan−1 ω 5 1. 0 dB for ω < 5 2. -20 dB for ω ≥ 5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 197. Solution: Sr. No. Factors Magnitude Curve Phase Curve 1 K = 60 straight line φ = 0 20log1060 = 35.56dB 2 1 jω slope of -20dB/dec passing though φ = −90 0 dB at ω = 1rad/sec 3 1 1+jω Line slopes are φ = −tan−1 (ω) 1. 0 dB for ω < 1 2. -20 dB for ω ≥ 1 4 1 1+ jω 5 Line slopes are φ = −tan−1 ω 5 1. 0 dB for ω < 5 2. -20 dB for ω ≥ 5 5 1 + jω 3 Line slopes are φ = tan−1 ω 3 1. 0 dB for ω < 3 2. +20 dB for ω ≥ 3 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 47 / 51
- 198. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 199. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 200. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 60 straight line of 35.56 dB 0.1 ∞ Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 201. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 60 straight line of 35.56 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 1 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 202. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 60 straight line of 35.56 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 1 3 1 1+jω -20 + (-20) = -40 dB/dec 1 3 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 203. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 60 straight line of 35.56 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 1 3 1 1+jω -20 + (-20) = -40 dB/dec 1 3 4 1 + jω 3 -40 + (+20) = -20 dB/dec 3 5 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 204. Solution: Step 4: Magnitude plot table: Sr. No. Factors Resultant slope S.P. (ω) E.P. (ω) 1 K = 60 straight line of 35.56 dB 0.1 ∞ 2 1 jω -20 dB/dec 0.1 1 3 1 1+jω -20 + (-20) = -40 dB/dec 1 3 4 1 + jω 3 -40 + (+20) = -20 dB/dec 3 5 5 1 1+ jω 3 -20 + (-20) = -40 dB/dec 5 ∞ Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 48 / 51
- 205. Solution: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 206. Solution: Step 5: Phase angle: Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 207. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 208. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 209. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 210. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 211. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 5 −90o -78.69 -45 59 -154.79 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 212. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 5 −90o -78.69 -45 59 -154.79 10 −90o -84.3 -63.4 73.3 -164.4 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 213. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 5 −90o -78.69 -45 59 -154.79 10 −90o -84.3 -63.4 73.3 -164.4 100 −90o -89.4 -87.1 88.3 -178.2 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 214. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 5 −90o -78.69 -45 59 -154.79 10 −90o -84.3 -63.4 73.3 -164.4 100 −90o -89.4 -87.1 88.3 -178.2 500 −90o -89.8 -89.4 89.6 -179.6 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 215. Solution: Step 5: Phase angle: φresultant (ω) = −90o − tan−1 (ω) − tan−1 (ω 5 ) + tan−1 (ω 3 ) ω 1 jω −tan−1 (ω) −tan−1 (ω 5 ) +tan−1 (ω 3 ) φresultant (ω) 0.1 −90o -5.7 -1.1 1.9 -94.9 0.5 −90o -26.5 -5.7 9.46 -112.9 1 −90o -45 -11.3 18.4 -127.9 5 −90o -78.69 -45 59 -154.79 10 −90o -84.3 -63.4 73.3 -164.4 100 −90o -89.4 -87.1 88.3 -178.2 500 −90o -89.8 -89.4 89.6 -179.6 1000 −90o -89.9 -89.71 89.8 -179.8 Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 49 / 51
- 216. Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 50 / 51
- 217. Thank you Please send your feedback at nbahadure@gmail.com Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 51 / 51
- 218. Thank you Please send your feedback at nbahadure@gmail.com For download and more information Click Here Nilesh Bhaskarrao Bahadure (Ph.D.) Control System June 30, 2021 51 / 51