




















![Command Format
struct APP_CMD
{
uint8_t COMMAND_NUM;
uint8_t COMMAND_ARGS[10];
};
/* Lets use this data
structure to store
command number and
its associated
arguments. */](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-26-320.jpg)





























































![#define UART_DR *((unsigned long * ) (0x40000000) )
/* This is a common function which write to UART DR */
int UART_Write( uint32_t len , uint8_t *buffer)
{
for (uint32_ti=0;i < len ; i++)
{
/* if Data Register is empty write it */
while(! is_DR_empty() );
UART_DR = buffer[i];
}
}
This is Thread-Unsafe code](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-90-320.jpg)
![#define UART_DR *((unsigned long * ) (0x40000000) )
/* This is a common function which write to UART DR */
int UART_Write( uint32_t len , uint8_t *buffer)
{
for (uint32_ti=0;i < len ; i++)
{
/* if Data Register is empty write it */
while(! is_DR_empty() );
UART_DR = buffer[i];
}
}
This is Thread-Unsafe code
This codeis absolutelyfine in non-multitaskingscenario( onlyone taskexistsper
application).But in multi-taskingscenario, this functionis thread unsafe.That means,
there is a possibility of race conditionsincethe critical section codeis notprotected.](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-91-320.jpg)

![Mutual Exclusion by Binary semaphore
#define UART_DR *((unsigned long * ) (0x40000000) )
/* This is a common function which write to UART DR */
int UART_Write( uint32_t len , uint8_t *buffer)
{
for (uint32_t i=0;i < len ; i++)
{
/* if Data Register is empty write it */
while(! is_DR_empty() );
UART_DR = buffer[i];
}
}](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-93-320.jpg)


![#define UART_DR *((unsigned long * ) (0x40000000) )
/* This is a common function which write to UART DR */
int UART_Write( uint32_t len , uint8_t *buffer)
{
for (uint32_t i=0;i < len ; i++)
{
sema_take_key(bin_sema );
/* if Data Register is empty write it */
while(! is_DR_empty() );
UART_DR = buffer[i]; //Critical section
sema_give_key( bin_sema );
}
}](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-96-320.jpg)








![t1
LowPriority task[LP]
MediumPriority task[MP]
HighPriority task[HP]
TheHP taskattempts to takethe Mutexbut
can't becauseit is stillbeingheldby theLP task.
TheHP task enters theblockedstateto wait for
thesemaphoreto becomeavailable.
TheLP taskreturningthe mutexcauses theHP taskto exit
theblockedstateas themutexholder.WhentheHP task
has finishedwiththe mutexit gives it back.TheMP task
only executes when theHP taskreturns totheblocked
stateso theMP taskneverholds up theHP task.
The LP tasktakes a Mutexbefore
being preempted by theHP task.
TheLP taskis preventingtheHP taskfromexecutingso inherits thepriorityof the
HP task. TheLP taskcannotnowbe preemptedby theMP task.TheLP task
cannot nowbe preempted by theMP task, so theamountof timethat priority
inversionexists is minimized. WhentheLP taskgives the mutexback it returns its
original priority.!
Time
1
2
3
4](https://image.slidesharecdn.com/masteringrtosfreertosandstm32fxwithdebugging-part3-190826055453/85/PART-3-Mastering-RTOS-FreeRTOS-and-STM32Fx-with-Debugging-105-320.jpg)



























PART-3 : Mastering RTOS FreeRTOS and STM32Fx with Debugging
- 1. Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging Learn Running/Porting FreeRTOS Real Time Operating System on STM32F4x and ARM cortex M based Mircocontrollers Created by : FastBit Embedded Brain Academy Visit www.fastbitlab.com for all online video courses on MCU programming, RTOS and embedded Linux PART-3
- 2. FastBit Embedded Brain Academy is an online training wing of Bharati Software. We leverage the power of the internet to bring online courses at your fingertip in the domain of embedded systems and programming, microcontrollers, real-time operating systems, firmware development, Embedded Linux. All our online video courses are hosted in Udemy E-learning platform which enables you to exercise 30 days no questions asked money back guarantee. For more information please visit : www.fastbitlab.com Email : contact@fastbitlab.com About FastBitEBA
- 3. Queues and its features
- 4. So ,what are queues ? Item-4 Item-3 Item-2 Item-1 Item-5 Tail head Item-0 Enqueue dequeue
- 5. So ,what are queues ? Tail Head Append (enqueue)
- 6. Queue Task A Task B 15 Queue Task A Task B Whena Queueis createdit does not containanythingso it is empty TaskA writes a valuein to thequeue. Thevalueis sentto the front Sincethequeuewas previouslyempty,the valueis nowboththefirst andthelast valuein thequeue:
- 7. 12 15 Queue Task A Task B 12 15 Queue Task A Task B TaskA sends another value. Thequeuenowcontains thepreviouslywrittenvalueandthis newly addedvalue.The previous value remains at the front of the queue while the new one is now at its back.Threespaces are stillavailable TaskB reads a valuein thequeue.It willreceivethevalue whichis in thefront of thequeue
- 8. 12 Queue Task A Task B Task B has removedan item.Theseconditemis movedto be theoneinthefrontof thequeue. Thisis the valuetask 2 will readnext timeit tries to reada value. Fourspaces are nowavailable:
- 9. Main Uses of Queues in RTOS 1. Synchronization between Tasks or Interrupts 2. Inter-task communication
- 10. Queues in Synchronization and inter-Task communication Blocked while accessing the empty Queue I needsomedatatoconsume But waitingforTASKA to producesome datain thequeue Task A Task B Data Producer Empty Queue Data Consumer
- 11. Queues in Synchronization and inter-Task communication I m unblocked Looks like Data available in the queue Task A Task B Queue Data Produced Unblocks Task B Data Producer Data Consumer
- 12. Creating a Queue
- 13. FreeRTOS API to Create a Queue xQueueHandle xQueueCreate( unsigned portBASE_TYPE uxQueueLength, unsigned portBASE_TYPE uxItemSize );
- 14. RAM Low High Heap (configTOTAL_HEAP_SIZE) Task -1 TCB Stack TCB1 STACK-1 Task -2 TCB Stack TCB-2 STACK-2 SCB Semaphore SCB Queue QCB Item list QCB ITEMLIST This RAM space is used for Global data, arrays, static variables, etc Dynamically Created kernel objects xTaskCreate() xTaskCreate() xSemaphoreCreateBinary()xQueueCreate()
- 16. Sending data to the Queue
- 17. Sending data to the queue xQueueSendToFront() xQueueSendToBack()
- 18. xQueueSendToFront() portBASE_TYPE xQueueSendToFront( xQueueHandle xQueue, const void * pvItemToQueue, portTickType xTicksToWait );
- 20. xQueueSendToBack() portBASE_TYPE xQueueSendToBack( xQueueHandle xQueue, const void * pvItemToQueue, portTickType xTicksToWait );
- 21. Receiving data from the Queue
- 22. Receiving data from the Queue xQueueReceive() xQueuePeek()
- 23. xQueueReceive() portBASE_TYPE xQueueReceive(xQueueHandle xQueue, const void * pvBuffer, portTickType xTicksToWait );
- 24. xQueuePeek() portBASE_TYPE xQueuePeek(xQueueHandle xQueue, const void * pvBuffer, portTickType xTicksToWait );
- 25. Exercise Design a FreeRTOS application which implements the below commands LED_ON, LED_OFF, LED_TOGGLE_START LED_TOGGLE_STOP LED_STATUS_READ RTC_DATETIME_READ The command should be sent to the board via UART from the user.
- 26. Command Format struct APP_CMD { uint8_t COMMAND_NUM; uint8_t COMMAND_ARGS[10]; }; /* Lets use this data structure to store command number and its associated arguments. */
- 28. Software Timers
- 29. Use case Toggle the led for very 500ms . led_toggle();
- 30. Hardware Vs Software Timers Hardware timers Software timers Handled by the TIMER peripheral of the MCU Handled by FreeRTOS kernel Code No FreeRTOS APIs . You have to create your own Function to manage the timer peripherals FreeRTOS APIs are availabe Micros/nano seconds resolutions are possible Resolution Depends on the RTOS_TICK_RATE_HZ
- 32. PT PT PT ISR execution (an event) will be caught by counting semaphore HT HT HT Events will be processed by handler Task
- 33. Synchronization and Mutual Exclusion in real world
- 34. A semaphore is a kernel object or you can say kernel service, that one or more threads of execution can acquire or release for the purpose of synchronization or mutual exclusion.
- 35. Synchronization in real world
- 37. Manager Employee Meeting @ 11 o Clock Tomorrow
- 38. Both are synchronized withthe time, hencethe One-on-One meeting runningas expected
- 39. Manager Employee Meeting Tomorrow Wasting your time arriving sooner You are not yet arrived for the meeting
- 40. Task-A producer Task-B Consumer t1 Task A runs first and it is waiting for data from Device driver t2 Task B runs that means Task A is pre-empted t3 Task A runs again and finds the device driver not yet given any data. t4 no data is available so it again doesn't take any action Task A and TaskB are not synchronizedfor the productionand consumptionof data
- 41. Task-A producer Task-B Consumer t1 Task A runs first and it is waiting for data from Device driver t2 Task B runs that means Task A is pre-empted t3 Task A runs again and finds the device driver not yet given any data. t4 no data is available so it again doesn't take any action
- 42. Kernel Objects which can be used for Synchronization Events (or Event Flags) Semaphores ( Counting and binary ) Queues and MessageQueues Pipes Mailboxes Signals (UNIXlike signals) Mutex FreeRTOS Supports Semaphores, Queues and Mutex
- 43. Mutual Exclusion Shared Entity TASK-1 TASK-2 Task-2cannot accessthe sharedentityunless Task-1 withdraws theownership Global variable , data structure Common function which use some global data . Peripheral memory ,etc
- 44. Concluding points Synchronization is nothing but aligning number of Tasks to achieve a desired behaviour. Where as mutual exclusion is avoiding a task to execute the critical section which is already owned by another task for execution. Typically Semaphores are used to implement the synchronization between tasks and between tasks and interrupts. Mutex are the best choice to implement the mutual exclusion. That is protecting access of a shared item. Semaphores also can be used to implement the mutual exclusion but it will introduce some serious design issues which we will see later.
- 45. Lets see how we can use semaphores for Synchronization
- 47. Creating a Semaphore SCB Value (Binary or a Count) Task-1 Task-2 Task-3 Task-Waiting-List ThisvalueDetermines howmany semaphoretokens are available. Keys or tokens Semaphore id or name
- 48. Types of Semaphore 1 Binary semaphore 2 Counting semaphore
- 49. Creating a Semaphore A single semaphore can be acquired a finite number of times by the tasks depending upon the how you first initializae the semaphore.
- 51. Semaphore Semaphores are kernel objects, or you can say kernel services which you can use to achieve the synchronization and mutual exclusion in your project.
- 52. Types of Semaphore 1. Binary semaphore 2. Counting semaphore
- 53. Binary Semaphore as name indicates, this semaphore works on only 2 values that is 1 and 0.
- 54. Binarysemaphore SCB Value Task-Waiting-List This“Value”eitherwillbe 0 or 1 Analogous toOnly 1 key Semaphore id or name Taskwaitinglistwill havethe Blocked tasks whichare waiting forthekey
- 55. Binary semaphore use cases 1. Synchronization That is synchronization between tasks or synchronization between interrupts and tasks. 2. Mutual Exclusion Binary semaphore can also be used for Mutual Exclusion, that is to guard the critical section
- 56. Counting semaphore SCB Value Task-Waiting-List This“Value”canbe any number. If youinitializeit to 5 forexample, thenit is analogous having5 keys. Analogous to having manykeys Semaphore id or name Taskwaitinglistwill havethe Blocked tasks whichare waiting forthekeys.
- 57. Counting semaphore use cases 1. CountingEvents In this usage scenario an event handler will 'give' a semaphore each time an event occurs – causing the semaphores count value to be increment on each give. A handler task will 'take' a semaphore each time it processes an event – causing the semaphores count value to be decremented on each take. 2. ResourceManagement In this usage scenario the count value indicates the number of resources available. To obtain control of a resource a, task must first obtain a semaphore – decrementing the semaphores count value. When the count value reaches zero there are no free resources. When a task finishes with the resource it 'gives' the semaphore back – incrementing the semaphores count value.
- 58. Counting semaphore use cases Resource Management In this usage scenario the count value indicates the number of resources available. To obtain control of a resource a task must first obtain a semaphore by decrementing the semaphores count value. When the count value reaches zero there are no free resources. When a task finishes with the resource it 'gives' the semaphore back thus incrementing the semaphores count value.
- 59. void interrupt_handler(void) { do_important_work(); /* this is very short code */ sema_give(&sem); /* Give means release the key */ } /* exit from the interrupt */ void task_function(void) { /* if taking a key is un-successful then this task will be blocked until key is available */ while ( sem_get(&sem ) ) // GET means, trying to take the key { // it will come here, only if taking a key is successful . /* Do time consuming work of the ISR */ } }
- 60. Counting semaphore use cases Event/Interrupt counting & handling
- 61. Binary Semaphore to achieve Synchronization between two tasks
- 62. Lets first see how binary semaphore can be used for synchronization between 2 tasks. The main use of binary semaphore or counting semaphore is synchronization. The synchronization can be between tasks or between a task and an interrupt.
- 63. Binary sema to Synchronize between Tasks Task-1 Data Producer Task-2 Data Consumer Sema_key Increments the key Whendatais produced Unblocks Task-B If it was blockeddueto Non-availabilityof key
- 64. voidtask1_running(void) { if( TRUE== produce_some_data()) { /* This is a signallingforthetask2 towakeup if it is blockeddueto nonavailabilityof key*/ sema_give(&sema_key); // ‘GIVE’ operationwill incrementthesemaphorevalueby 1 } } voidtask2_running(void) { /* if sema_key is unavailable thentask2will be blocked.*/ /*if sema_key is available,thentask2will takeit and sema_key becomes unavailableagain */ while(sema_take(&sema_key) ) { //Taskwillcomehereonlywhenthe sem_take operationis successful. /* lets consumethe data*/ /*sincethe sem_keyvalueis zeroat this point,thenext timewhentask-2tries to take,it willbe blocked. */ } }
- 65. /* declaring a semaphore object */ Semaphore sem_key; int main() { /* Create Task1 */ /* Create Task-2 */ /* Create a binarysemaphore*/ Sem_key = create_bin_sema(); /* schedule both the tasks */ }
- 66. Exercise Create 2 tasks 1) Manager task 2) Employee task With manager task being the higher priority . When manager task runs it should create a “Ticket id” and post it to the queue and signal the employee task to process the “Ticket id”. When employee task runs it should read from the queue and process the “Ticket id” posted by the manager task. Use binary semaphore to synchronize between manger and employee task.
- 67. Binary semaphore to achieve Synchronization between an Interrupt & a Task
- 68. Synchronizationbetween Interrupt& Task The Binary semaphore is very handy and well suited to achieve the synchronization between an interrupt handler execution and the task handler execution.
- 69. void interrupt_handler(void) { do_important_work(); /* this is very short code */ xSemaphoreGiveFromISR(&sem); /* Give means release the key */ } /* exit from the interrupt */ /* I am helper task for the interrupt ! I do time consuming work on behalf of interrupt handler*/ void helper_task(void) { /* if taking a key is un-successful then this task will be blocked until key is available */ while (xSemaphoreTake(&sem ) ) // GET means, trying to take the key { // it will come here, only if taking a key is successful . /* Do time consuming work of the ISR */ } }
- 70. A NA A NA Thesemaphoreis not available xSemaphoreTake() Task Thetaskis blockedwaiting forthesemaphore xSemaphoreTake() Task Interrupt!!! xSemaphoreGiveFromISR() An Interrupt occurs..that ‘gives’thesemaphore Synchronization between an Interrupt and a Task using Binary semaphore 1 Task is in blockedstate initially 2 Interrupt occurs Thesemaphore is available
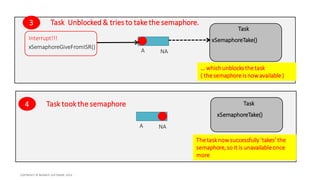
- 71. A NA A NA Interrupt!!! xSemaphoreGiveFromISR() xSemaphoreTake() Task … whichunblocks thetask ( thesemaphoreis nowavailable) xSemaphoreTake() Task Thetasknowsuccessfully‘takes’the semaphore,so it is unavailableonce more 3 Task Unblocked & tries to take the semaphore. 4 Task tookthe semaphore
- 74. Binary sema to Synchronize between interrupt and task. 1.An interrupt occurred, when the task was in blocked state 2.The ISR executed and gave the semaphore ,due to that the task was unblocked. 3.The Task executed and took the semaphore. 4.The task performed the intended work and tried to take the semaphore once again 5.Entered the Blocked state again ,if the semaphore was not immediately available.
- 75. Events Latching & Processing using Counting semaphore
- 76. A NA A NA Thesemaphoreis not available xSemaphoreTake() Task Thetaskis blockedwaiting forthesemaphore xSemaphoreTake() Task Interrupt!!! xSemaphoreGiveFromISR() An Interrupt occurs..that ‘gives’thesemaphore Synchronization between an Interrupt and a Task using Binary semaphore
- 77. A NA A NA Interrupt!!! xSemaphoreGiveFromISR() xSemaphoreTake() Task … whichunblocks thetask ( thesemaphoreis nowavailable) xSemaphoreTake() Task Thetasknowsuccessfully‘takes’the semaphore,so it is unavailableonce more
- 78. A NA A NA Thesemaphoreis not available xSemaphoreTake() Task Thetaskis blockedwaiting forthesemaphore xSemaphoreTake() Task Interrupt!!! xSemaphoreGiveFromISR() An Interrupt occurs..that ‘gives’thesemaphore Binary semaphore can latch at most 1 event
- 79. A NA A NA Interrupt!!! xSemaphoreGiveFromISR() xSemaphoreTake() Task … whichunblocks thetask ( thesemaphoreis nowavailable) xSemaphoreTake() Task Thetasknowsuccessfully‘takes’the semaphore,so it is unavailableonce more
- 80. A NA A NA Interrupt!!! xSemaphoreGiveFromISR() Task Thetaskis still processingthefirst interrupt event xSemaphoreTake() Task Whenprocessingof theoriginaleventcompletes thetaskcalls xSemaphoreTake()again.Because anotherinterrupthas alreadyoccurredthesemaphoreis alreadyavailableso thetask takes the semaphorewithout everenteringtheBlockedstate Anotherinterrupt occurs whilethetaskis stillprocessing thefirst event.TheISR ‘Gives’thesemaphoreagain, effectivelylatching theeventso theevent is not lost
- 81. Concluding Points on Latching Events 1. When the interrupts/events happen relatively slow, the binary semaphore can latch at most only one event 2. If multiple interrupts/events trigger back to back, then the binary semaphore will not able to latch all the events. So some events will be lost . 3. How to solve the above issue ? Welcome to the world of “Counting Semaphore”
- 82. Counting semaphore to latch multiple events
- 83. Thesemaphoreis not available xSemaphoreTake() Task Thetaskis blockedwaiting forthesemaphore xSemaphoreTake() Task Interrupt!!! xSemaphoreGiveFromISR() An Interrupt occurs..that ‘gives’thesemaphore Counting semaphore can be used to latch multiple events Semaphorecountis 0 Semaphorecountis 1
- 84. Interrupt!!! xSemaphoreGiveFromISR() xSemaphoreTake() Task … whichunblocks thetask ( thesemaphoreis nowavailable) xSemaphoreTake() Task Thetasknowsuccessfully‘takes’the semaphore,so it is unavailableonce more Semaphorecountis 1 Thesemaphoreis not available Semaphorecountis 0
- 85. Interrupt!!! xSemaphoreGiveFromISR() Task Thetaskis still processingthefirst interrupt event xSemaphoreTake() Task Whenprocessingof thefirstevent completes,thetaskcalls xSemaphoreTake()again.Againtwo semaphores arealready ‘available‘,oneis takenwithout thetaskeverenteringtheBlockedState, leavingonemore‘latched’ semaphoreavailable. Another2 interruptoccurwhilethetaskis stillprocessingthe firstevent. TheISR ‘Gives’thesemaphoreeachtime. effectively latchingboththeevents so neithereventis lost Semaphorecountis 2 Semaphorecountis 1
- 86. Concluding points on Counting semaphore You can use counting semaphore to count the events and process them serially one by one using another task. The counting semaphore can also be used for resource management .That is to regulate access to multiple identical resources
- 87. Exercise Create 2 tasks. 1) Hander task 2) Periodic task Periodic task priority must be higher than the handler task. Use counting semaphore to process latched events(by handler task) sent by fast triggering interrupts. Use the counting semaphore to latch events from the interrupts
- 88. Mutual Exclusion using Binary Semaphore
- 89. Access to a resource that is shared either between tasks or between tasks and interrupts needs to be serialized using a some techniques to ensure data consistency. Usually a common code block which deals with global array , variable or memory address, has the possibility to get corrupted , when many tasks or interrupts are racing around it Mutual Exclusion using Binary Semaphore
- 90. #define UART_DR *((unsigned long * ) (0x40000000) ) /* This is a common function which write to UART DR */ int UART_Write( uint32_t len , uint8_t *buffer) { for (uint32_ti=0;i < len ; i++) { /* if Data Register is empty write it */ while(! is_DR_empty() ); UART_DR = buffer[i]; } } This is Thread-Unsafe code
- 91. #define UART_DR *((unsigned long * ) (0x40000000) ) /* This is a common function which write to UART DR */ int UART_Write( uint32_t len , uint8_t *buffer) { for (uint32_ti=0;i < len ; i++) { /* if Data Register is empty write it */ while(! is_DR_empty() ); UART_DR = buffer[i]; } } This is Thread-Unsafe code This codeis absolutelyfine in non-multitaskingscenario( onlyone taskexistsper application).But in multi-taskingscenario, this functionis thread unsafe.That means, there is a possibility of race conditionsincethe critical section codeis notprotected.
- 92. Mutual Exclusion by Binary semaphore
- 93. Mutual Exclusion by Binary semaphore #define UART_DR *((unsigned long * ) (0x40000000) ) /* This is a common function which write to UART DR */ int UART_Write( uint32_t len , uint8_t *buffer) { for (uint32_t i=0;i < len ; i++) { /* if Data Register is empty write it */ while(! is_DR_empty() ); UART_DR = buffer[i]; } }
- 94. 2 ways we can Implement the mutual exclusion in FreeRTOS 1. Using Binary semaphore APIs 2. Using Mutex APIs
- 96. #define UART_DR *((unsigned long * ) (0x40000000) ) /* This is a common function which write to UART DR */ int UART_Write( uint32_t len , uint8_t *buffer) { for (uint32_t i=0;i < len ; i++) { sema_take_key(bin_sema ); /* if Data Register is empty write it */ while(! is_DR_empty() ); UART_DR = buffer[i]; //Critical section sema_give_key( bin_sema ); } }
- 97. Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource Twotaskseachwant to access theresource,but a taskis not permittedtoaccesstheresourceunlessit is thetokenholder Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource TaskA attempts totakethesemaphore,becausesemaphoreis availableTask A successfully becomethesemaphoreholderso it is permittedtoaccess the resource xSemaphoreTake()
- 98. Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource TaskB executes andattempts totakethesamesemaphore.TaskA stillhas the semaphore, so theattempt fails andTaskB is not permittedto accesstheguardedresource! Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource TaskB opts toentertheblockedstateto wait forthesemaphore,allowing TaskA to run again. TaskA finisheswiththeresourceso ‘gives’thesemaphoreback . xSemaphoreTake() xSemaphoreGive() xSemaphoreTake()
- 99. Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource TaskA givingthe semaphoreback causes TaskB to exittheblockedstate( thesemaphoreis nowavailable ). Task B cannowsuccessfullyobtainthesemaphore,and havingdoneso is permittedto accesstheresource. Task-A Task-BA NA Guarded Resource This resource is Guarded by binary semaphore Binary semaphore Used to guard the resource WhenTaskB finishes theresourceit toogives thesemaphoreback. Thesemaphoreis nowonceagainavailable tobothtasks. xSemaphoreTake() xSemaphoreGive()
- 100. Advantages of Mutex over Binary semaphore
- 101. Mutex-Intro
- 102. FreeRTOS Mutex Services Mutex is derived from the phrase Mutual Exclusion ! Mutex is also kind of binary semaphore that include a priority inheritance mechanism which minimizes the effect of Priority inversion . Binary semaphores are the better choice for implementing synchronisation (between tasks or between tasks and an interrupt), mutexes are the better choice for implementing simple mutual exclusion
- 103. Advantages of Mutex Over Binary semaphore. Priority Inheritance Mutexes and binary semaphores are very similar – the only major difference is mutexes automatically provide a basic ‘priorityinheritance’ mechanism. Priority inheritance is a technique by which mutex minimizes the negative effects of priority inversion . Mutex can not able to fix the priority inversion problem completely but it surely lessens its impact.
- 104. Advantages of Mutex Over Binary semaphore. Priority Inheritance Most of the RTOS including FreeRTOS mutex implementation implements priority inheritance feature. Since mutex has all these features to avoid priority inversion, the memory consumed by mutex serivce may be higher than the binary semaphore..
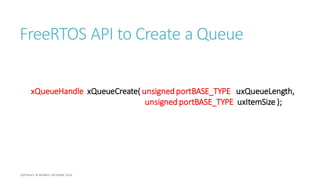
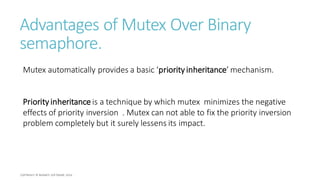
- 105. t1 LowPriority task[LP] MediumPriority task[MP] HighPriority task[HP] TheHP taskattempts to takethe Mutexbut can't becauseit is stillbeingheldby theLP task. TheHP task enters theblockedstateto wait for thesemaphoreto becomeavailable. TheLP taskreturningthe mutexcauses theHP taskto exit theblockedstateas themutexholder.WhentheHP task has finishedwiththe mutexit gives it back.TheMP task only executes when theHP taskreturns totheblocked stateso theMP taskneverholds up theHP task. The LP tasktakes a Mutexbefore being preempted by theHP task. TheLP taskis preventingtheHP taskfromexecutingso inherits thepriorityof the HP task. TheLP taskcannotnowbe preemptedby theMP task.TheLP task cannot nowbe preempted by theMP task, so theamountof timethat priority inversionexists is minimized. WhentheLP taskgives the mutexback it returns its original priority.! Time 1 2 3 4
- 107. Mutex Disadvantage If your system is very simple having small number of manageable tasks or if you are working in memory constrained environment then its better to avoid using mutex by opting out from the compilation . Because mutex will surely eat up more CODE space than binary semaphore.
- 108. Advantages of Mutex over Binary semaphore
- 109. Crude way to protect critical section
- 110. Ways to protect the Critical Section 1. Binary semaphore 2. Mutex 3. Crude way ( disabling interrupts of the system, either globally, or up to a specific interrupt priority level)
- 111. Advantages of Mutex Over Binary semaphore. Mutex automatically provides a basic ‘priorityinheritance’ mechanism. Priorityinheritance is a technique by which mutex minimizes the negative effects of priority inversion . Mutex can not able to fix the priority inversion problem completely but it surely lessens its impact.
- 112. GoodTask ArrogantTask UART_DR (shareddata) I want to access the UART_DR I too want to access it !!!
- 113. GoodTask ArrogantTask Alright ! Lets have an agreement ! No one accesses UART_DR without acquiring the mutex . No ! I don’t agree to this agreement UART_DR (shareddata)
- 114. GoodTask ArrogantTask I will access whenever I wantHow to safeguard my data ?? UART_DR (shareddata)
- 115. GoodTask ArrogantTask I will access whenever I want Lets disable the Interrupt of the whole system Which also prevents pre- emption ! UART_DR (shareddata)
- 116. FreeRTOS Priority
- 117. 0 1 2 3 4 Priority levels Highest Lowest ARM Cortex M Priority FreeRTOS Priority 0 Lowest 4 Highest Priority levels
- 118. Priority register and priority levels in ARM Cortex-M Processor
- 119. AT91SAM3X8E STM32F446RE STAtmel ARM Cortex M M3 M4
- 120. Priority register in Cortex M3/M4 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 8-bit interrupt priorityregister In CortexM basedProcessor everyinterruptandSystemexceptionhas 8 bitinterruptpriority registerto configure its Priority So , ideallythereare 2^8 ( 256) interruptpriority levelsfrom 0x00 to 0xff . Where0x00 is the highestpriorityand 0xff is the lowestpriority
- 121. Priority Register Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Implemented Not implemented Microcontroller Vendor XXX Microcontroller Vendor YYY Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Implemented Not implemented 8 Levels of Priority level 16 Levels of Priority level Write has no effect Write has no effect 0x00,0x20,0x40,0x60, 0x80,0xA0,0xC0, 0xE0 0x00,0x10,0x20,0x30,0x40,0x50, 0x60,0x70,0x80,0x90,0xa0,0xb0,0xc0,0xd0,0xe0,0xf0 AT91SAM3X8ESTM32F4xxTM4C123G
- 122. Example 1 : Setting Priority Let’s say you want to configure a priority of an interrupt number 8(IRQ8) to be 5. Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Implemented Not implemented AT91SAM3X8E Interrupt priority Register corresponding to IRQ8 So, Now you want to write value 5 into this register.. How do you write ?
- 123. Example 1 : Setting Priority Let’s say you want to configure a priority of an interrupt number 8(IRQ8) to be 5. AT91SAM3X8E Interrupt priority Register corresponding to IRQ8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Implemented Not implemented 0 0 0 0 0 1 0 1 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Implemented Not implemented 0 1 0 1 0 0 0 0 Priority_register = priority_value << ( 8 - __NVIC_PRIO_BITS) Priority_register = priority_value
- 126. FreeRTOS Stack and heap RAM Low High Heap (configTOTAL_HEAP_SIZE) Task -1 TCB Stack TCB1 STACK-1 Task -2 TCB Stack TCB-2 STACK-2 SCB Semaphore SCB Queue QCB Item list QCB ITEMLIST This RAM space is used for Global data, arrays, static variables, etc Dynamically Created kernel objects xTaskCreate() xTaskCreate() xSemaphoreCreateBinary()xQueueCreate()
- 127. FreeRTOS Heap management Scheme FreeRTOS APIs and Applications heap_1.c heap_2.c heap_3.c heap_4.c heap_5.c pvPortMalloc() pvPortMalloc() vPortFree() pvPortMalloc() vPortFree() pvPortMalloc() vPortFree() pvPortMalloc() vPortFree() Application uses any one of these Schemes according to its requirements Your_own _mem.c pvPortMalloc() vPortFree()
- 128. heap_1.c • Simplest Implementation among all other heap management implementations • In this implementation you can only allocate Heap memory but you can not free it • Can be used if your application never deletes a task, queue, semaphore, mutex, etc. (which actually covers the majority of applications in which FreeRTOS gets used). • This implementation is always deterministic (always takes the same amount of time to execute) and cannot result in memory fragmentation.
- 129. heap_2.c • Heap_2.c is implemented using “Best Fit” algorithm • This scheme allows freeing of memory unlike heap_1.c • Combining adjacent free blocks into a single large blocks is not possible using this scheme • This scheme is used when the application repeatedly deletes tasks, queues, semaphores, mutexes, etc . With the possibility of memory fragmentation. • Should not be used if the memory being allocated and freed is of a random size • It is not deterministic , but this scheme is much more efficient than most standard C library malloc implementations.
- 130. heap_3.c • Heap_3.c just implements a wrapper around your standard library memory allocation functions such as malloc and free • The wrapper simply makes the malloc() and free() functions thread safe. • This implementation requires the linker to setup a heap, and the compiler library to provide malloc() and free() implementations. • Not deterministic • Not optimized for Embedded Systems, so consumes more Code space. • the configTOTAL_HEAP_SIZE setting in FreeRTOSConfig.h has no effect when heap_3 is used
- 131. heap_4.c • This scheme uses a first fit algorithm and, unlike scheme 2, it does combine adjacent free memory blocks into a single large block • Can be used even when the application repeatedly deletes tasks, queues, semaphores, mutexes, etc • Even when the memory being allocated and freed in random size, it is less likely to result in a heap space that is badly fragmented in to smaller useless blocks. • Much more efficient than most standard C library malloc implementations. • heap_4.c is particularly useful for applications that want to use the portable layer memory allocation schemes directly in the application code (rather than just indirectly by calling API functions that themselves call pvPortMalloc() and vPortFree()).
- 132. heap_5.c • This scheme uses the same first fit and memory coalescence algorithms as heap_4, and allows the heap to span multiple non adjacent (non-contiguous) memory regions.