Mechanical Engineering Standard Design Data Book
23 likes15,026 views

This document provides a summary of key concepts and equations related to mechanical design data for various components including friction clutches, brakes, belt drives, chain drives, rolling contact bearings, sliding contact bearings, spur gears, helical gears, bevel gears, and worm gears. Key equations are presented for analyzing components like clutches, brakes, gear trains, and bearings. Design considerations related to factors like load capacity, power transmission, material properties, and component life are also discussed.









![9
θμ sin2 max
2
wpRMt =
)2sin2(
2
1
max θθμ += RwpRY
Internal expanding brake
( ) ( )[ ]
max
2121max
sin4
2cos2coscoscos4
φ
θθθθμ −−−
=
hRRwp
M f
( ) ( )[ ]
max
1212max
sin4
2sin2sin2
φ
θθθθ −−−
=
Rwhp
Mn
max
21max
2
sin
)cos(cos
φ
θθμ −
=
wpR
Mt
C
MM
P
fn −
= (Clock wise rotation of the brake drum)
C
MM
P
fn +
= (Anti clock wise rotation of the brake drum)
0
2
0
max 9090 >= θφ when
0
22max 90<= θθφ when
Where
maxp = maximum intensity of pressure.
μ = coefficient of friction.
)2sin2(
2
1
max θθ += RwpRX
A MEADinfo Publication Shinto Mathew](https://image.slidesharecdn.com/mechanicaldesigndatabook-140712112424-phpapp01/85/Mechanical-Engineering-Standard-Design-Data-Book-10-320.jpg)















![25
Rolling Contact Bearing
Stribeck’s Equation
( ) ...............2cos2cos2 3210 +++= ββ PPPC
β
δ
δ
cos
1
2
=
32
1
2
1
2
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
P
P
δ
δ
MPC 10 =
Where,
( ) ( )[ ]2525
2cos2cos21 ββ ++=M
0C = Static load
..., 21 δδ = radial deflections at the respective balls.
z
360
=β
Where
z is number of balls
⎟
⎠
⎞
⎜
⎝
⎛
M
z
is practically constant and Stribeck suggested a value of
5 for ⎟
⎠
⎞
⎜
⎝
⎛
M
z
10
5
1
zPC ⎟
⎠
⎞
⎜
⎝
⎛
=
A MEADinfo Publication Shinto Mathew](https://image.slidesharecdn.com/mechanicaldesigndatabook-140712112424-phpapp01/85/Mechanical-Engineering-Standard-Design-Data-Book-26-320.jpg)










































Mechanical Engineering Standard Design Data Book
- 2. 1 Design Data Hand Book Contents:- 1 Friction Clutches • Single plate clutches…………………………………………………………………05 • Multi plate clutches……………………………………………………………………05 • Cone clutches………………………………………………………………………………………06 • Centrifugal clutches……………………………………………………………………06 2 Brakes • External Contracting Brakes…………………………………………………08 • Internal Expanding Brake…………………………………………………………09 • Band Brakes……………………………………………………………………………………………10 • Thermal Considerations………………………………………………………………11 3 Belt Drives • Geometrical Relationships………………………………………………………12 • Analysis of Belt Tensions………………………………………………………13 • Condition for Maximum Power…………………………………………………13 • Selection of Flat Belts from the Manufacture’s Catalogue…………………………………………………………………………………………………13 • Selection of V-Belts……………………………………………………………………15 4 Chain Drives • Roller Chains………………………………………………………………………………………20 • Geometrical Relationships………………………………………………………20 • Power Rating of Roller Chains……………………………………………21 • Sprocket Wheels…………………………………………………………………………………24 5 Rolling Contact Bearings • Stribeck’s Equation………………………………………………………………………25 • Equivalent Bearing Load……………………………………………………………26 A MEADinfo Publication Shinto Mathew
- 3. 2 • Load Life Relationship………………………………………………………………26 • Selection of Bearing from the Manufacture’s Catalogue…………………………………………………………………………………………………27 • Selection of Taper Roller Bearings………………………………32 • Design for Cyclic Load and Speed……………………………………38 • Bearing With a Probability of Survival Other Than 90 Percent………………………………………………………………………………………………38 6 Sliding Contact Bearings • Effect of Temperature on Viscosity………………………………39 • Hydrostatic Step Bearing…………………………………………………………40 • Energy Losses in Hydrostatic Bearing…………………………40 • Reynold’s Equation…………………………………………………………………………41 • Raimondi and Boyd Method…………………………………………………………41 • Temperature Rise………………………………………………………………………………43 • Bearing Design –Selection of Parameters…………………44 7 Spur Gears • Standard System of Gear Tooth……………………………………………45 • Force Analysis……………………………………………………………………………………50 • Beam Strength of Gear Tooth…………………………………………………47 • Effective Load on Gear Tooth………………………………………………48 • Estimation of Module Based on Beam Strength………50 • Wear Strength of Gear Tooth…………………………………………………50 • Estimation of Module Based on Wear Strength………51 • Gear Design for Maximum Power Transmitting Capacity……………………………………………………………………………………………………51 8 Helical Gears • Virtual Number of Tooth……………………………………………………………52 • Tooth Proportions……………………………………………………………………………53 • Beam Strength of Helical Gears…………………………………………54 • Effective Load on Gear Tooth………………………………………………54 • Wear Strength of Helical Gears…………………………………………55 9 Bevel Gears • Force Analysis……………………………………………………………………………………57 A MEADinfo Publication Shinto Mathew
- 4. 3 • Beam Strength of Bevel Gears………………………………………………58 • Wear Strength of Bevel Gears………………………………………………59 • Effective Load on Gear Tooth………………………………………………60 10 Worm Gears • Proportions of Worm Gears………………………………………………………62 • Force Analysis……………………………………………………………………………………64 • Friction in Worm Gears………………………………………………………………64 • Strength Rating of Worm Gears……………………………………………65 • Wear rating of worm gears………………………………………………………67 A MEADinfo Publication Shinto Mathew
- 5. 4 FRICTION CLUTCHES Notations:- D = outer diameter of friction disk. d = inner diameter of friction disk. p = intensity of pressure. P = total operating force. ( )ftM = torque transmitted by friction. z = number of pairs of contacting surfaces, for single plate clutch z=one. (z = number of plates – 1). µ = coefficient of friction. ap = intensity of pressure at the inner edge. α = semi cone angle. dr = radius of the drum. gr = radius of the centre of gravity of the shoe in engaged position. m = mass of each shoe. cfP = centrifugal force. =sP Spring force 2ω = running speed. (Rad/sec) 1ω = speed at which engagement starts. (Rad/sec) A MEADinfo Publication Shinto Mathew
- 6. 5 Single Plate & Multi Plate Clutches Uniform pressure theory )( 4 22 dDP −= π ( ) )( )( 3 22 33 dD dDPz M ft − − = μ Uniform wear theory )( 2 dD dp P a −= π ( ) )( 4 dD Pz M ft += μ A MEADinfo Publication Shinto Mathew
- 7. 6 Cone Clutches Uniform pressure theory )( 4 22 dDP −= π ( ) )( )( sin3 22 33 dD dDPz M ft − − = α μ Uniform wear theory )( 2 dD dp P a −= π ( ) )( sin4 dD Pz M ft += α μ Centrifugal Clutches 1000 2 1 g s rm P ω = ( ) 1000 )( 2 1 2 2 ωωμ − = zrmr M dg ft Note: - here z = number of shoes. A MEADinfo Publication Shinto Mathew
- 8. 7 Brakes Notations:- E = total energy absorbed by the brake. K.E = kinetic energy absorbed by the brake. P.E = potential energy absorbed by the brake. m = mass of the system. I = mass moment of inertia of the rotating body. k = radius of gyration. 21,vv = Initial and final velocities of the system 21,ωω = Initial and final angular velocities of the body tM = braking torque. θ = angle through which the brake drum rotates during the braking period. mghEP mkEK IEK vvmEK = −= −= −= . )( 2 1 . )( 2 1 . )( 2 1 . 2 2 2 1 2 2 2 2 1 2 2 2 1 ωω ωω θtME = A MEADinfo Publication Shinto Mathew
- 9. 8 External Contracting Brakes Block brake with short shoe NRMt μ= Where tM = Braking Torque R = Radius of the Brake Drum μ = Coefficient of Friction N = Normal reaction plwN = Where p = Permissible pressure between the block and the brake drum l = length of the block w = width of the block )( PNR NR Y X −= = μ N b ca P × − = )( μ Pivoted block brake with long shoe φcosmaxPP = θθ θ 2sin2 sin4 + = R h A MEADinfo Publication Shinto Mathew
- 10. 9 θμ sin2 max 2 wpRMt = )2sin2( 2 1 max θθμ += RwpRY Internal expanding brake ( ) ( )[ ] max 2121max sin4 2cos2coscoscos4 φ θθθθμ −−− = hRRwp M f ( ) ( )[ ] max 1212max sin4 2sin2sin2 φ θθθθ −−− = Rwhp Mn max 21max 2 sin )cos(cos φ θθμ − = wpR Mt C MM P fn − = (Clock wise rotation of the brake drum) C MM P fn + = (Anti clock wise rotation of the brake drum) 0 2 0 max 9090 >= θφ when 0 22max 90<= θθφ when Where maxp = maximum intensity of pressure. μ = coefficient of friction. )2sin2( 2 1 max θθ += RwpRX A MEADinfo Publication Shinto Mathew
- 11. 10 fM = moment due to friction. nM = moment due to normal force. tM = elemental torque due to frictional force. R = radius of the brake lining. w = face width of frictional lining. Band Brakes 1P = tension on the tight side of the band. 2P = tension on the loose side of the band. θ = angle of wrap (rad). tM = torque capacity of the brake. R = radius of the brake drum. RPPMt )( 21 −= Rw P p = Rw P p 1 max = p = intensity of pressure. w = width of the frictional lining. Differential band brake. l ebaP p )(2 μθ ×− = A MEADinfo Publication Shinto Mathew
- 12. 11 Thermal Considerations mc E t =Δ Where tΔ = temperature rise of the brake drum assembly ( C0 ) E = total energy absorbed by the brake m = mass of the brake drum assembly c = specific heat of the brake drum material A MEADinfo Publication Shinto Mathew
- 13. 12 Belt Drives GEOMETRICAL RELATIONSHIPS Open belt drive ) 2 (sin2180 1 C dD s − −= − α ) 2 (sin2180 1 C dD b − += − α C dDdD CL 4 )( 2 )( 2 2 − + + += π Cross belt drive ) 2 (sin2180 1 C dD bs + +== − αα C dDdD CL 4 )( 2 )( 2 2 + + + += π A MEADinfo Publication Shinto Mathew
- 14. 13 Analysis of belt tension αf e mvP mvP = − − 2 2 2 1 (For flat belts) ) 2 1 sin( 2 2 2 1 θαf e mvP mvP = − − (For V-belts) Power transmitted= vPP )( 21 − Condition for maximum power transmission m P v i 3 = SELECTION OF FLAT BELT FROM THE MANUFACTURES CATALOGUE )()( max kWFkW a= Where max)(kW = power transmitted by the belt for the design purpose A MEADinfo Publication Shinto Mathew
- 15. 14 )(kW = actual power transmitted by the belt aF = load correction factor Type of load aF (i) Normal load 1.0 (ii) Steady load, e.g. centrifugal pumps-fans-light machine tools-conveyors 1.2 (iii) Intermittent load, e.g. heavy duty fans- blowers-compressors- reciprocating pumps-line shafts-heavy duty machines 1.3 (iv) Shock load, e.g. vacuum pumps-rolling mills- hammers-grinders 1.5 Arc of contact factor sα (degrees) 120 130 140 150 160 170 180 190 200 dF 1.33 1.26 1.19 1.13 1.08 1.04 1.00 0.97 0.94 HI-SPEED 0.0118 kW per mm width per ply FORT 0.0147 kW per mm width per ply A MEADinfo Publication Shinto Mathew
- 16. 15 Standard widths of the belt are as follows 3-Ply 25 40 50 63 76 4-Ply 40 44 50 63 76 90 100 112 125 152 5-Ply 76 100 112 125 152 6-Ply 112 125 152 180 200 dcorrected FkWkW ×= max)()( For HI-SPEED belt, Corrected kW rating= (5.08) 0.0118v For FORT belt, Corrected kW rating= (5.08) 0.0147v SELECTION OF V-BELTS Dimensions of standard cross-sections Belt Section Width W(mm) Thickness T(mm) Minimum pitch diameter of pulley(mm) A 13 8 125 B 17 11 200 C 22 14 300 D 32 19 500 E 38 23 630 A MEADinfo Publication Shinto Mathew
- 17. 16 Conversion of inside length to pitch length of the belt Belt section A B C D E Difference between pitch length and inside length (mm) 36 43 56 79 92 Preferred values for pitch diameters (mm) 125 132 140 150 160 170 180 190 200 212 224 236 250 265 280 300 315 355 375 400 425 450 475 500 530 560 600 630 670 710 750 800 900 1000 A MEADinfo Publication Shinto Mathew
- 18. 17 ld a FFbeltofratingkW FkWinpowerdtransmitte beltsofNumber ×× × = ___ )___( __ Where aF = correction factor for industrial service dF = correction factor for arc of contact lF = correction factor for belt length A MEADinfo Publication Shinto Mathew
- 19. 18 A MEADinfo Publication Shinto Mathew
- 20. 19 iL Belt section A B C D E 3658 - 1.11 1.00 0.90 - 4013 - 1.13 1.02 0.92 - 4115 - 1.14 1.03 0.92 - 4394 - 1.15 1.04 0.93 - 4572 - 1.16 1.05 0.94 - 4953 - 1.18 1.07 0.96 - 5334 - 1.19 1.08 0.96 0.94 6045 - - 1.11 1.00 0.96 6807 - - 1.14 1.03 0.99 7569 - - 1.16 1.05 1.01 dF sα (Degrees) 0.9 0.8 0.7 0.6 0.5 120 150 180 A MEADinfo Publication Shinto Mathew
- 21. 20 Chain Drives Roller Chains Dimensions and breaking loads of roller chains ISO chain number Pitch p (mm) Roller diameter 1d (mm) Width 1b (mm) Transverse pitch tp (mm) Breaking load for single strand chain (kN) 06 B 9.525 6.35 5.72 10.24 10.7 08 B 12.70 8.51 7.75 13.92 18.2 10 B 15.875 10.16 9.65 16.59 22.7 12 B 19.05 12.07 11.68 19.46 29.5 16 B 25.40 15.88 17.02 31.88 65.0 20 B 31.75 19.05 19.56 36.45 98.1 24 B 38.10 25.40 25.40 48.36 108.9 28 B 44.45 27.94 30.99 59.56 131.5 32 B 50.80 29.21 30.99 58.55 172.4 40 B 63.50 39.37 38.10 72.29 272.2 Geometric Relationships Velocity ratio, 1 2 2 1 z z n n i == Average velocity, 3 1060 × = zpn v Length of the chain, pLL n ×= Number of links in the chain, ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ×⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − +⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + +⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = a pzzzz p a Ln 2 1221 22 2 π Where a = centre distance between the axis of the driving and driven sprockets. A MEADinfo Publication Shinto Mathew
- 22. 21 ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥⎦ ⎤ ⎢⎣ ⎡ − −⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + −+⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + −= 2 12 2 2121 2 8 224 π zzzz L zz L p a nn POWER RATING OF ROLLER CHAINS 1000 1vP kW = Where 1P = allowable tension in the chain (N) v = average velocity of chain A MEADinfo Publication Shinto Mathew
- 23. 22 kW rating of chain = ( ) 21 ___ KK KdtransmittebetokW s × × Where sK = service factor Multiple strand factors )( 1K Number of strands 1K 1 1.0 2 1.7 3 2.5 4 3.3 5 3.9 6 4.6 A MEADinfo Publication Shinto Mathew
- 24. 23 Tooth correction factor )( 2K Number of teeth on the driving sprocket 2K 15 0.85 16 0.92 17 1.00 18 1.05 19 1.11 20 1.18 21 1.26 22 1.29 23 1.35 24 1.41 25 1.46 30 1.73 A MEADinfo Publication Shinto Mathew
- 25. 24 SPROCKET WHEELS A MEADinfo Publication Shinto Mathew
- 26. 25 Rolling Contact Bearing Stribeck’s Equation ( ) ...............2cos2cos2 3210 +++= ββ PPPC β δ δ cos 1 2 = 32 1 2 1 2 ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = P P δ δ MPC 10 = Where, ( ) ( )[ ]2525 2cos2cos21 ββ ++=M 0C = Static load ..., 21 δδ = radial deflections at the respective balls. z 360 =β Where z is number of balls ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ M z is practically constant and Stribeck suggested a value of 5 for ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ M z 10 5 1 zPC ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = A MEADinfo Publication Shinto Mathew
- 27. 26 2 1 kdP = Where d is, the ball diameter and factor k depends upon radii of curvature at the point of contact and on the modulii of elasticity of the materials. Stribeck’s Equation 5 2 0 zkd C = Equivalent Bearing Load ar YFXFP += Where, P= equivalent dynamic load rF = radial load aF = axial or thrust load X and Y are radial and thrust factors respectively and there values are given in the manufactures catalogue. Load Life Relationship p P C L ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = Where L = bearing life (in million revolutions) C = dynamic load capacity (N) p = 3 (for ball bearing) p = 10/3 (for roller bearing) A MEADinfo Publication Shinto Mathew
- 28. 27 Relationship between life in million revolutions and and life in working hours is given by 6 10 60 hnL L = Where hL =bearing life (hours) n = speed of rotation (rpm) Selection of bearing from manufacture’s catalogue X and Y factors for single-row deep groove ball bearings ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ 0C Fa e F F r a ≤⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ e F F r a >⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ e X Y X Y 0.025 0.040 0.070 0.130 0.250 0.500 1 1 1 1 1 1 0 0 0 0 0 0 0.56 0.56 0.56 0.56 0.56 0.56 2.0 1.8 1.6 1.4 1.2 1.0 0.22 0.24 0.27 0.31 0.37 0.44 ar YFXFP += A MEADinfo Publication Shinto Mathew
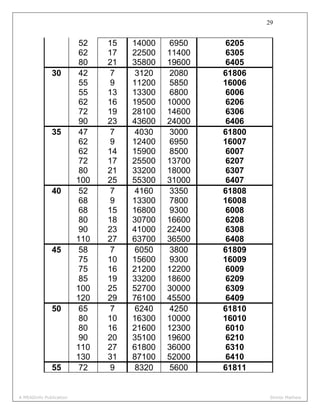
- 29. 28 Dimensions and static and dynamic load capabilities of single–row deep groove ball bearings. Principal dimensions (mm) Basic load ratings(N) Designation d D B C 0C 10 19 5 1480 630 61800 26 8 4620 1960 6000 30 9 5070 2240 6200 35 11 8060 3750 6300 12 21 5 1430 695 61801 28 8 5070 2240 6001 32 10 6890 3100 6201 37 12 9750 4650 6301 15 24 5 1560 815 61802 32 9 5590 2500 6002 35 11 7800 3550 6202 42 13 11400 5400 6302 17 26 5 1680 930 61803 35 10 6050 2800 6003 40 12 9560 4500 6202 47 14 13500 6550 6303 62 17 22900 11800 6403 20 32 7 2700 1500 61804 42 8 7020 3400 16400 42 12 9360 4500 6004 47 14 12700 6200 6204 52 15 15900 7800 6304 72 19 30700 16600 6404 25 37 7 3120 1960 61805 47 8 7610 4000 16005 47 12 11200 5600 6005 A MEADinfo Publication Shinto Mathew
- 30. 29 52 15 14000 6950 6205 62 17 22500 11400 6305 80 21 35800 19600 6405 30 42 7 3120 2080 61806 55 9 11200 5850 16006 55 13 13300 6800 6006 62 16 19500 10000 6206 72 19 28100 14600 6306 90 23 43600 24000 6406 35 47 7 4030 3000 61800 62 9 12400 6950 16007 62 14 15900 8500 6007 72 17 25500 13700 6207 80 21 33200 18000 6307 100 25 55300 31000 6407 40 52 7 4160 3350 61808 68 9 13300 7800 16008 68 15 16800 9300 6008 80 18 30700 16600 6208 90 23 41000 22400 6308 110 27 63700 36500 6408 45 58 7 6050 3800 61809 75 10 15600 9300 16009 75 16 21200 12200 6009 85 19 33200 18600 6209 100 25 52700 30000 6309 120 29 76100 45500 6409 50 65 7 6240 4250 61810 80 10 16300 10000 16010 80 16 21600 12300 6010 90 20 35100 19600 6210 110 27 61800 36000 6310 130 31 87100 52000 6410 55 72 9 8320 5600 61811 A MEADinfo Publication Shinto Mathew
- 31. 30 90 11 19500 12200 16011 90 18 28100 17000 6011 100 21 43600 25000 6211 120 29 71500 41500 6311 140 33 99500 63000 6411 60 78 10 8710 6100 61812 95 11 19900 13200 16012 95 18 29600 18300 6012 110 22 47500 28000 6212 130 31 81900 48000 6312 150 35 108000 69500 6412 65 85 10 11700 8300 61813 100 11 21200 14600 16013 100 18 30700 19600 6013 120 23 55900 34000 6213 140 33 92300 56000 6313 160 37 119000 78000 6413 70 90 10 12100 9150 61814 110 13 28100 19000 16014 110 20 37700 24500 6014 125 24 61800 37500 6214 150 35 104000 63000 6314 180 42 143000 104000 6414 75 95 10 12500 9800 61815 115 13 28600 20000 10615 115 20 39700 26000 6015 130 25 66300 40500 6215 160 37 112000 72000 6315 190 45 153000 114000 6415 A MEADinfo Publication Shinto Mathew
- 32. 31 Dynamic load capacity p P C L ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = A MEADinfo Publication Shinto Mathew
- 33. 32 Selection of Taper Roller Bearings Y F F r a 5.0 = Where Y is the thrust factor Equivalent dynamic load for single row taper roller bearings is given by ( ) ( ) eFFwhenYFFP eFFwhenFP raar rar >+= ≤= 4.0 Dimensions, Dynamic capabilities and calculation factors for single row taper roller bearing d D B C Designation e Y 20 42 15 22900 32004X 0.37 1.6 47 15.25 26000 30204 0.35 1.7 52 16.25 31900 30304 0.30 2.0 52 72.25 41300 32304 0.30 2.0 25 47 15 25500 32005X 0.43 1.4 52 16.25 29200 30205 0.37 1.6 52 19.25 34100 32205B 0.57 1.05 52 22 44000 33205 0.35 1.7 62 18.25 41800 30305 0.30 2 62 18.25 35800 31305 0.83 0.72 62 25.25 56100 32305 0.30 2 30 55 17 33600 32006X 0.43 1.4 62 17.25 38000 30206 0.37 1.6 62 21.25 47300 32206 0.37 1.6 62 21.25 45700 32206B 0.57 1.05 A MEADinfo Publication Shinto Mathew
- 34. 33 30 62 25 60500 33206 0.35 1.7 72 20.75 52800 30306 0.31 1.9 72 20.75 44600 31306 0.83 0.72 72 28.75 72100 32306 0.31 1.9 35 62 18 40200 32007X 0.46 1.3 72 18.25 48400 30207 0.37 1.6 72 24.25 61600 32207 0.37 1.6 72 24.25 57200 32207B 0.57 1.05 72 28 79200 33207 0.35 1.7 80 22.75 68200 30307 0.31 1.9 80 22.75 57200 31307 0.83 0.72 80 32.75 89700 32307 0.31 1.9 80 32.75 88000 32307B 0.54 1.1 40 68 19 49500 32008X 0.37 1.6 75 26 74800 33108 0.35 1.7 80 19.75 58300 30208 0.37 1.6 80 24.75 70400 32208 0.37 1.6 80 32 96800 33208 0.35 1.7 85 33 114000 T2EE040 0.35 1.7 90 25.25 80900 30308 0.35 1.7 90 25.25 69300 31308 0.83 1.72 90 35.25 110000 32308 0.35 1.7 45 75 20 55000 32009X 0.40 1.5 80 26 79200 33109 0.37 1.6 85 20.75 62700 30209 0.40 1.5 85 24.75 74800 32209 0.40 1.5 85 32 101000 33209 0.40 1.5 95 29 84200 T7FC045 0.88 0.68 95 36 140000 T2ED045 0.33 1.8 100 27.25 101000 30309 0.35 1.7 100 27.25 85800 31309 0.83 0.72 100 38.25 132000 32309 0.35 1.7 100 38.25 128000 32309B 0.54 1.1 50 80 20 57200 32010X 0.43 1.4 A MEADinfo Publication Shinto Mathew
- 35. 34 50 80 24 64400 33010 0.31 1.9 85 26 80900 33110 0.40 1.5 90 21.75 70400 30210 0.43 1.4 90 24.75 76500 32210 0.43 1.4 90 32 108000 33210 0.40 1.5 100 36 145000 T2ED050 0.35 1.7 105 32 102000 T7FC050 0.88 0.68 110 29.25 117000 30310 0.35 1.7 110 29.25 99000 31310 0.83 0.72 110 42.25 161000 32310 0.35 1.7 110 42.25 151000 32310B 0.54 1.1 60 95 23 76500 32012X 0.43 1.4 95 27 85800 33012 0.33 1.8 100 30 110000 33112 0.40 1.5 110 23.75 91300 30212 0.40 1.5 110 29.75 119000 32212 0.40 1.5 110 38 157000 33212 0.40 1.5 115 39 157000 T5ED060 0.54 1.1 115 40 183000 T2EE060 0.33 1.8 125 37 145000 T7FC060 0.83 0.72 130 33.5 161000 30312 0.35 1.7 130 33.5 134000 31312 0.83 0.72 130 48.5 216000 32312 0.35 1.7 130 48.5 205000 32312B 0.54 1.1 70 110 25 95200 32014X 0.43 1.4 110 31 121000 33014 0.28 2.1 120 37 161000 33114 0.37 1.6 125 26.25 119000 30214 0.43 1.4 125 33.25 147000 32214 0.43 1.4 125 41 190000 33214 0.40 1.5 130 43 220000 T2ED070 0.33 1.8 140 39 168000 T7FC070 0.88 0.68 140 32 264000 T4FE070 0.44 1.35 150 38 209000 3014 0.35 1.7 A MEADinfo Publication Shinto Mathew
- 36. 35 70 150 38 176000 31314 0.83 0.72 150 54 275000 32314 0.35 1.7 150 54 264000 32314B 0.54 1.1 80 125 29 128000 32016X 0.43 1.4 125 36 157000 33016 0.28 2.1 130 37 168000 33116 0.43 1.4 140 28.25 140000 30216 0.43 1.4 140 35.25 176000 32216 0.43 1.4 140 46 233000 33216 0.43 1.4 145 46 264000 T2ED080 0.31 1.9 170 42.5 255000 30316 0.35 1.7 170 42.5 212000 31316 0.83 0.72 170 61.5 358000 32316 0.35 1.7 170 61.5 336000 32316B 0.54 1.1 90 140 32 157000 32018X 0.43 1.4 140 39 205000 33018 0.27 2.2 150 45 238000 33118 0.40 1.5 155 46 270000 T2ED090 0.33 1.8 160 32.5 183000 30218 0.43 1.4 160 42.5 238000 32218 0.43 1.4 190 46.5 308000 30318 0.35 1.7 190 46.5 251000 31318 0.83 0.72 190 67.5 429000 32318 0.35 1.7 100 145 24 119000 T4CB100 0.48 1.25 150 32 161000 32020X 0.46 1.3 150 39 212000 33020 0.28 2.1 165 47 292000 T2EE100 0.31 1.9 180 37 233000 30220 0.43 1.4 180 49 297000 32220 0.43 1.4 180 63 402000 33220 0.40 1.5 215 51.5 380000 30320 0.35 1.7 215 56.5 352000 31320X 0.83 0.72 215 77.5 539000 32320 0.35 1.7 150 225 48 347000 32030X 0.46 1.3 A MEADinfo Publication Shinto Mathew
- 37. 36 150 270 49 402000 30230 0.43 1.4 270 77 682000 32230 0.43 1.4 320 72 765000 30330 0.35 1.7 320 82 837000 31330X 0.83 0.72 200 280 51 446000 32940 0.40 1.5 310 70 704000 32040X 0.43 1.4 360 64 737000 30240 0.43 1.4 360 104 1140000 32240 0.40 1.5 300 420 76 990000 32960 0.40 1.5 A MEADinfo Publication Shinto Mathew
- 38. 37 A MEADinfo Publication Shinto Mathew
- 39. 38 Design for Cyclic Load and Speeds 3 3 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ Σ Σ = N BP Pe Bearing With a Probability of Survival Other Than 90 Percent b e e R R L L 1 90 90 1 log 1 log ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Where b = 1.17 A MEADinfo Publication Shinto Mathew
- 40. 39 Sliding Contact Bearing Effect of Temperature on Viscosity A MEADinfo Publication Shinto Mathew
- 41. 40 Hydrostatic Step Bearing The following notations are used in the analysis, W = Trust load 0R = outer radius of the shaft iR = inner radius of the shaft iP = supply of inlet pressure oP = outlet or atmospheric pressure 0h = fluid film thickness Q = flow of the lubricant μ = viscosity of the lubricant ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = i e i R R hP Q 0 3 0 log6μ π ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = i e ii R R RRP W 0 22 0 log 2 π Energy Losses in Hydrostatic Thrust Bearing )10)(()( 6 0 − −= PPQkW ip pkW )( = power loss in pumping 0 44 0 2 6 )( 1005.58 1 )( h RRn kW i f − ⎥⎦ ⎤ ⎢⎣ ⎡ × = μ fkW )( = power loss due to friction A MEADinfo Publication Shinto Mathew
- 42. 41 fpt kWkWkW )()()( += tkW )( = total power loss Reynold’s Equation ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∂ ∂ =⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ +⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∂ ∂ ∂ ∂ x h U z p h zx p h x μ633 Raimondi and Boyd Method Dimensionless performance parameters for full journal bearings with side flow ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ d l ε ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ c h0 S φ f c r ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ lrcn Q s ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Q Qs ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ maxp p ∞ 0 1.0 ∞ 70.92 ∞ π 0 _ 0.1 0.9 0.240 69.10 4.80 3.03 0 0.826 0.2 0.8 0.123 67.26 2.57 2.83 0 0.814 0.4 0.6 0.0626 61.94 1.52 2.26 0 0.764 0.6 0.4 0.0389 54.31 1.20 1.56 0 0.667 0.8 0.2 0.021 42.22 0.961 0.760 0 0.495 0.9 0.1 0.0115 31.62 0.756 0.411 0 0.358 0.97 0.03 _ _ _ _ 0 _ 1.0 0 0 0 0 0 0 0 1 0 1.0 ∞ 85 ∞ π 0 _ 0.1 0.9 1.33 79.5 26.4 3.37 0.150 0.540 0.2 0.8 0.631 74.02 12.8 3.59 0.280 0.529 0.4 0.6 0.264 63.10 5.79 3.99 0.497 0.484 0.6 0.4 0.121 50.58 3.22 4.33 0.680 0.415 0.8 0.2 0.0446 36.24 1.70 4.62 0.842 0.313 0.9 0.1 0.0188 26.45 1.05 4.74 0.919 0.247 A MEADinfo Publication Shinto Mathew
- 43. 42 0.97 0.03 0.00474 15.47 0.514 4.82 0.973 0.152 1.0 0 0 0 0 0 1.0 _ ½ 0 1.0 ∞ 88.5 ∞ π 0 _ 0.1 0.9 4.31 81.62 85.6 3.43 0.173 0.523 0.2 0.8 2.03 74.94 40.9 3.72 0.318 0.506 0.4 0.6 0.779 61.45 17.0 4.29 0.552 0.441 0.6 0.4 0.319 48.14 8.10 4.85 0.730 0.365 0.8 0.2 0.0923 33.31 3.26 5.41 0.874 0.267 0.9 0.1 0.0313 23.66 1.60 5.69 0.939 0.206 0.97 0.03 0.00609 13.75 0.610 5.88 0.980 0.126 1.0 0 0 0 0 _ 1.0 0 ¼ 0 1.0 ∞ 89.5 ∞ π 0 _ 0.1 0.9 16.2 82.31 322.0 3.45 0.180 0.515 0.2 0.8 7.57 75.18 153.0 3.76 0.330 0.489 0.4 0.6 2.83 60.86 61.1 4.37 0.567 0.415 0.6 0.4 1.07 46.72 26.7 4.99 0.746 0.334 0.8 0.2 0.261 31.04 8.8 5.60 0.884 0.240 0.9 0.1 0.0736 21.85 3.50 5.91 0.945 0.180 0.97 0.03 0.0101 12.22 0.922 6.12 0.984 0.108 1.0 0 0 0 0 _ 1.0 0 c = R-r Where c = radial clearance (mm) R = radius of bearing r = radius of journal c e =ε Where e =eccentricity ratio, ε = eccentricity ratio ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ −= c h0 1ε Where 0h =film thickness A MEADinfo Publication Shinto Mathew
- 44. 43 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ c h0 is called the minimum film thickness variable The Sommerfed number is given by p n c r S sμ 2 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = Where sn =journal speed p = unit bearing pressure The Coefficient of Friction Variable (CFV) is given by f c r CFV ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =)( Where f is the coefficient of friction Frictional power 6 10 2 )( fWrn kW s f π = The Flow Variable (FV) is given by lrcn Q FV s =)( Where l = length of the bearing Q= flow of the lubricant Temperature Rise )( )(3.8 FV CFVp t =Δ 2 t TT iav Δ += A MEADinfo Publication Shinto Mathew
- 45. 44 Bearing Design – Selection of Parameters A MEADinfo Publication Shinto Mathew
- 46. 45 Spur Gears The pitch circle diameter is given by mzd =1 Centre to centre distance, 2 )( gpn zzm a + = Here transmission ratio g p p g n n z z i == Standard System of Gear Tooth Choice 1 (preferred) 1.00 5.00 1.25 6.0 1.50 8.00 2.00 10.00 2.5 12.00 3.00 16.00 4.0 20.00 Choice2 1.12 5.5 1.375 7.00 1.75 9.00 2.25 11.00 2.75 14.0 3.50 18.00 4.5 Addendum( )ah =(m) Dedendum ( )fh =1.25m Clearance(c) =0.25m Tooth thickness = 1.5708m Fillet radius = 0.4m A MEADinfo Publication Shinto Mathew
- 47. 46 Force Analysis n kW Mt π2 )(1060 6 × = 1 2 d m p t t = αtantr PP = αcos t N P P = Number of Teeth α2min sin 2 =z Pressure angle ( )α 0 5.14 0 20 0 25 minz (Theoretical) 32 17 11 minz (Practical) 27 14 9 Face Width (3m)<b< (12m) In preliminary stages of gear design, the face width assumed as ten times of module. A MEADinfo Publication Shinto Mathew
- 48. 47 Beam Strength of Gear Tooth YmbS bb σ= Values of the Lewis form factor Y for 200 full depth involute system z Y z Y z Y 15 0.289 27 0.348 55 0.415 16 0.295 28 0.352 60 0.421 17 0.302 29 0.355 65 0.425 18 0.308 30 0.358 70 0.429 19 0.314 32 0.364 75 0.433 20 0.320 33 0.367 80 0.436 21 0.326 35 0.373 90 0.442 22 0.330 37 0.380 100 0.446 23 0.333 39 0.386 150 0.458 24 0.337 40 0.389 200 0.463 25 0.340 45 0.399 300 0.471 26 0.344 50 0.408 Rack 0.484 A MEADinfo Publication Shinto Mathew
- 49. 48 Effective Load on Gear Tooth (1)For ordinary and commercially cut gears made with form cutters with v<10m/s v Cv + = 3 3 (2) For actually hobbled and generated gears with v<20m/s, v Cv + = 6 6 (3) For precision gears with shaving, grinding and lapping operations and with v>20m/s, v Cv + = 6.5 6.5 The pitch line velocity is given by 3 1060 ' × = nd v π The effective load between two meshing teeth is given by v ts eff C PC P = n the final stages of gear design, when the gear dimensions are known, the errors specified and the quality of gears determined, the dynamic load is calculated by the equations derived by Prof. Spotts. The effective load is given by ( )dtseff PPCP += where dP is the dynamic load Depending upon the materials of the pinion and the gear, there are three equations for the dynamic load. (1) Steel Pinion with steel gear: ( )2 2 2 1 21 2530 rr rbrzen P pp d + = A MEADinfo Publication Shinto Mathew
- 50. 49 (2) C.I Pinion with C.I gear: ( )2 2 2 1 21 3785 rr rbrzen P pp d + = (3) Steel Pinion with C.I Gear ( )2 2 2 1 21 92.03260 rr rbrzen P pp d + = e = sum of errors between two meshing teeth (mm) gp eee += where pe =error for pinion ge =error for gear Type of driven machines Source of power Electric motor Turbine/Multi cylinder engine Single-cylinder engine Generators-feeding mechanisms-belt conveyors- blowers-compressors-agitators and mixers 1.10 1.25 1.50 Machine tools-hoist and cranes-rotary drives-piston pumps-distribution pumps 1.25 1.50 1.75 Blanking and shearing presses -rolling mills-centrifuges-steel work machinery 1.75 2.00 2.25 A MEADinfo Publication Shinto Mathew
- 51. 50 Estimation of Module Based on Beam Strength ( ) ( ) 31 6 3 1060 ⎟⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × = Y S m b znC fsCkW m ut v s π Wear Strength of Gear Tooth ( ) 4.1 11cossin 21 2 EE K c + = αασ A MEADinfo Publication Shinto Mathew
- 52. 51 KbQdS pw 1 = pg g zz z Q − = 2 Expression for the load stress factor K can be simplified when all the gears are made of steel with a 200 pressure angle . in this special case, 2 21 207000 mmNEE == 0 20=α 2 ))(81.9(27.0 mmNBHNc =σ where BHN=Brinell Hardness Number. Therefore, 2 100 16.0 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = BHN K Estimation of Module Based on Wear Strength ( ) ( ) 31 2 6 1060 ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ × = QK m b Cnz fsCkW m vpp s π Gear Design for Maximum Power Transmitting Capacity dw PS 2= 2 w dt S PP == A MEADinfo Publication Shinto Mathew
- 53. 52 Helical gears ψcos P Pn = ψcosmmn = nm = normal module m = transverse module ψtan p pa = α α ψ tan tan cos n = ψcos nzm d = ψcos2 )( 21 zzm a n + = p g g p z z i == ω ω Where i=speed ratio for helical gear Suffixes p and g refer to the pinion and gear respectively a is the centre to centre distance between two helical gears having 1z and 2z as the number of teeth. The normal pressure angle is usually 0 20 . Virtual number of teeth ψ3 1 cos z z = A MEADinfo Publication Shinto Mathew
- 54. 53 Tooth proportions In helical gears, the normal module nm should be selected from standards. The first preference values of the normal module are nm (mm) 1, 1.25, 1.5, 2, 2.5,3,4,5,6,8 and10. The standard proportions of the addendum and dedendum are, Addendum na mh =)( Dedendum nf mh 25.1)( = Clearance nmc 25.0)( = Addendum circle diameter ad is given by ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ += 2 cos ψ z md na Dedendum circle diameter fd is given by ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −= 5.2 cosψ z md nf ψ π sin nm b ≥ This is the minimum face width. Force Analysis =tp Tangential component =rp Radial component =ap Axial or thrust component ψα coscos nt pp = ψtanta pp = A MEADinfo Publication Shinto Mathew
- 55. 54 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ψ α cos tan n tr pp d m p t t 2 = Beam strength of helical gears YmS bnb σ= Effective load on gear tooth n kW Mt π2 )(1060 6 × = d M P t t 2 = v ts eff C PC P = sC = service factor (from table) vC = velocity factor The velocity factor , v Cv + = 6.5 6.5 Dynamic load is given by A MEADinfo Publication Shinto Mathew
- 56. 55 2 2 2 1 21 2530 rr rbrzen P pp d + = )coscos( ψαndtseff PPCP += )( fsPS effb = Wear strength of helical gears ψ2 cos KbQd S p w = 11 1 2 pg g zz z Q + = pg g zz z Q + = 2 for internal helical gear pg g zz z Q − = 2 4.1 11 cossin 21 2 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + = EE K nnc αασ A MEADinfo Publication Shinto Mathew
- 57. 56 =nα Normal pressure angle )20( 0 2 100 16.0 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = BHN K )( fsPS effw = A MEADinfo Publication Shinto Mathew
- 58. 57 Bevel Gears γcos2 D rb = γcos 1 z z = g p z z =γtan p g z z =Γtan 2 π γ =Γ+ The cone distance 0A is given by 22 0 22 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ +⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = gp DD A Force Analysis ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −= 2 sin 2 γbD r p m Where mr = radius of the pinion at the mid point along the face width b = face width of the tooth A MEADinfo Publication Shinto Mathew
- 59. 58 m t t r M P = αtants PP = Where tP = tangential or useful component which is perpendicular to the plane of the paper. sP = the separating force between the two meshing teeth γα γα sintan costan ta tr PP PP = = Beam Strength of Bevel Gears ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −= 0 1 A b YmbS bb σ Where bS beam strength of the tooth m = module at the large end of the tooth b = face width bσ = permissible bending stress ( 3utS ) Y = Lewis form factor based on formative number of teeth 0A = cone distance D M P t t 2 = face width of the bevel gear is generally taken as (10 m) or ( 30A ) whichever is smaller A MEADinfo Publication Shinto Mathew
- 60. 59 ∴b = (10 m) or ( )30A (Whichever is smaller) WEAR STRENGTH OF BEVEL GEARS Buckingham’s equation KbQdS pw 1 = Where wS = wear strength b = face width of gears Q = ratio factors 1 pd = pitch circle diameter of the formative pinion K = material constant bp rd 21 = γcos 75.0 KbQD S p w = (Buckingham’s equation) γtan 2 pg g zz z Q + = 4.1 11 cossin2 ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + = gp c EE K αασ When pinion as well as the gear is made of steel with 0 20 pressure angle, the value of K is given by 2 100 16.0 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = BHN K A MEADinfo Publication Shinto Mathew
- 61. 60 EFFECTIVE LOAD ON GEAR TOOTH n kW Mt π2 )(1060 6 × = D M P t t 2 = v ts eff C PC P = sC = service factor (from table) Type of driven machines Source of power Electric motor Turbine/Multi cylinder engine Single-cylinder engine Generators-feeding mechanisms-belt conveyors- blowers-compressors-agitators and mixers 1.10 1.25 1.50 Machine tools-hoist and cranes-rotary drives-piston pumps-distribution pumps 1.25 1.50 1.75 Blanking and shearing presses -rolling mills-centrifuges-steel work machinery 1.75 2.00 2.25 vC = velocity factor The velocity factor for cut teeth is given by A MEADinfo Publication Shinto Mathew
- 62. 61 v Cv + = 6 6 For general teeth, v Cv + = 6.5 6.5 Dynamic load is given by 2 2 2 1 21 1 2530 rr rrbzen P pp d + 21,rr Radii of the pinion and gear respectively 1 b Axial width of the gear blank ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −= 2 sin 2 1 γbD r p ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ −= 2 cos 2 2 γbD r g )( dtseff PPCP += Stress in gear tooth due to bending )( fsPS effb = Stress in gear tooth due to pitting )( fsPS effw = A MEADinfo Publication Shinto Mathew
- 63. 62 Worm Gears Notations:- 1z = number of starts on the worm 2z = number of teeth on the worm wheel q = diametral quotient m = module 1d = pitch circle diameter of the worm 1ad = outer diameter of the worm 2ad = outer diameter of the worm wheel 2d = pitch circle diameter of the worm wheel l = lead of the worm xp = axial pitch of the worm a = the centre distance i = the speed ratio. F = the effective face width rl = the length of the root of the worm gear teeth. Proportions of Worm Gears A MEADinfo Publication Shinto Mathew
- 64. 63 m d q 1 = 1zpl x= 22 mzd = mp x π= 1mzl π= )( 2 1 2zqma += A MEADinfo Publication Shinto Mathew
- 65. 64 1 2 z z i = )1(2 += qmF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + += − cd F cdl a ar 2 sin)2( 1 1 1 Force Analysis tP )( 1 = tangential component on the worm aP )( 1 = axial component on the worm rP )( 1 = radial component on the worm 1 1 2 )( d M P t t = ( ) ( )γμγα γμγα cossincos sincoscos )()( 11 + − ×= ta PP )cossin(cos sin )()( 11 γμγα α + ×= tr PP Friction in worm gears sv = rubbing velocity 1v = pitch line velocity of the worm 2v = pitch line velocity of the worm wheel )1000)(60( 11 1 nd v π = γ π cos)60000( 11nd vs = ( ) )cot( tancos γμα γμα η + − = cas A MEADinfo Publication Shinto Mathew
- 66. 65 Strength Rating Of Worm Gears γ γ cos65.17)( cos65.17)( 2222 2111 dmlSXM dmlSXM rbbt rbbt = = 1)( tM , 2)( tM = permissible torque on the worm wheel 1bX , 2bX = speed factors for the strength of worm and worm wheel 1bS , 2bS = bending stress factors for worm and worm wheel A MEADinfo Publication Shinto Mathew
- 67. 66 m = module rl = the length of the root of the worm gear teeth. 2d = pitch circle diameter of the worm wheel γ = lead angle of the worm Power transmitting capacity of the worm gear based on the beam strength is given by 6 1060 2 × = tnM kW π Where )( tM is the lower value between 1)( tM and 2)( tM . A MEADinfo Publication Shinto Mathew
- 68. 67 Wear Rating of Worm Gears mdYSXM mdYSXM Zcct Zcct 8.1 2224 8.1 2113 )(64.18)( )(64.18)( = = 3)( tM , 4)( tM = permissible torque on the worm wheel 1cX , 2cX = speed factors for the strength of worm and worm wheel 1cS , 2cS = surface stress factors of the worm and worm wheel zY = zone factor Thermal Considerations kWH g )1(1000 η−= Where gH = rate heat generation A MEADinfo Publication Shinto Mathew
- 69. 68 η = efficiency of the of the worm gear (fraction) kW = power transmitted by the gears AttkHd )( 0−= Where dH = rate of heat dissipation k = overall heat transfer coefficient of housing walls( )CmW 02 t = temperature of the lubrication oil. ( C0 ) 0t = temperature of the surrounding air ( C0 ) A = effective surface area of housing kA kW tt Attk kW )1(1000 )1(1000 )( 0 0 η η − += − − = A MEADinfo Publication Shinto Mathew