
![Background
• Map-based visual localization has been attracting much attention
• It is, however, sometimes necessary to rely on visual fiducial tags
(aka visual markers) for initialization and fail-safe
[Oishi, 2020]](https://image.slidesharecdn.com/iros2022ppttemplatesimple-231115084724-88bd42a9/85/Scalable-Fiducial-Tag-Localization-on-a-3D-Prior-Map-via-Graph-Theoretic-Global-Tag-Map-Registration-IROS2022-2-320.jpg)













![Example Result
Planes
Tags
• While the consistency graph contains many edges,
the max-clique can be found very efficiently [Rossi, 2015]](https://image.slidesharecdn.com/iros2022ppttemplatesimple-231115084724-88bd42a9/85/Scalable-Fiducial-Tag-Localization-on-a-3D-Prior-Map-via-Graph-Theoretic-Global-Tag-Map-Registration-IROS2022-17-320.jpg)
![Example Result
Planes
Tags
Consistency graph contains
429,735 hypothesis pairs
• While the consistency graph contains many edges,
the max-clique can be found very efficiently [Rossi, 2015]](https://image.slidesharecdn.com/iros2022ppttemplatesimple-231115084724-88bd42a9/85/Scalable-Fiducial-Tag-Localization-on-a-3D-Prior-Map-via-Graph-Theoretic-Global-Tag-Map-Registration-IROS2022-18-320.jpg)
![Example Result
Planes
Tags
Consistency graph contains
429,735 hypothesis pairs
Maximum clique consists of
56 tag-plane correspondences
found in 92 msec
• While the consistency graph contains many edges,
the max-clique can be found very efficiently [Rossi, 2015]
• Given the tag-plane correspondences, we estimate the tag-map transformation
by minimizing normal-to-normal ICP distance [Rusinkiewicz, 2019]](https://image.slidesharecdn.com/iros2022ppttemplatesimple-231115084724-88bd42a9/85/Scalable-Fiducial-Tag-Localization-on-a-3D-Prior-Map-via-Graph-Theoretic-Global-Tag-Map-Registration-IROS2022-19-320.jpg)


![Evaluation in Simulation
• The method is evaluated on the Replica dataset [Savva, 2019]
Global tag-map registration
: 0.039m / 1.021°
Tag localization accuracy
: 98% success rate
Baseline (FPFH+RANSAC/Teaser) : 26% and 70%
Robustness to outlier tags](https://image.slidesharecdn.com/iros2022ppttemplatesimple-231115084724-88bd42a9/85/Scalable-Fiducial-Tag-Localization-on-a-3D-Prior-Map-via-Graph-Theoretic-Global-Tag-Map-Registration-IROS2022-22-320.jpg)



Scalable Fiducial Tag Localization on a 3D Prior Map via Graph-Theoretic Global Tag-Map Registration [IROS2022]
- 1. Scalable Fiducial Tag Localization on a 3D Prior Map Via Graph-Theoretic Global Tag-Map Registration Kenji Koide, Shuji Oishi, Masashi Yokozuka, and Atsuhiko Banno National Institute of Advanced Industrial Science and Technology (AIST), Japan
- 2. Background • Map-based visual localization has been attracting much attention • It is, however, sometimes necessary to rely on visual fiducial tags (aka visual markers) for initialization and fail-safe [Oishi, 2020]
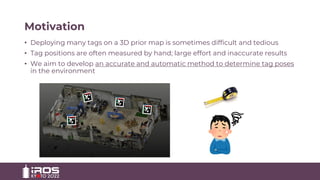
- 3. Motivation • Deploying many tags on a 3D prior map is sometimes difficult and tedious • Tag positions are often measured by hand; large effort and inaccurate results • We aim to develop an accurate and automatic method to determine tag poses in the environment
- 4. Proposed Method 1. VIO-based Tag-Relative-Pose Estimation We use an agile camera to observe tags in the environment and estimate the relative poses between tags via landmark SLAM 2. Global Tag-Map Registration We then roughly align tags and a prior map by establishing tag-plane correspondences via graph-theoretic correspondence estimation 3. Estimation Refinement via Direct Camera-Map Alignment Tag and camera poses are refined by directly aligning agile camera images with the prior map and re-optimize all variables under all constraints
- 5. VIO-based Tag-Relative-Pose Estimation • We use an agile camera and observe each tag in the environment at least once • The tag poses in the VIO frame is estimated via landmark SLAM VIO (VINS-Mono) Tag detections (Apriltags) Pose graph optimization
- 6. Global Tag-Map Registration • We want to align the estimated tag poses with a prior 3D map without initial guess • The modality difference makes it difficult to apply image matching… Prior 3D map (sparse point cloud) Estimated tag poses (visually detected) Align w/o initial guess
- 7. Geometry-based Tag-Plane Matching • We assume that most tags are placed on a plane in the environment • We establish tag-plane correspondences to determine the tag-map transformation Detecting planes in the environment 1. Region growing segmentation 2. RANSAC plane detection 3. Fit oriented BBoxes to plane points
- 8. Geometry-based Tag-Plane Matching • We assume that most tags are placed on a plane in the environment • We establish tag-plane correspondences to determine the tag-map transformation Detecting planes in the environment 1. Region growing segmentation 2. RANSAC plane detection 3. Fit oriented BBoxes to plane points
- 9. Geometry-based Tag-Plane Matching • We assume that most tags are placed on a plane in the environment • We establish tag-plane correspondences to determine the tag-map transformation Detecting planes in the environment 1. Region growing segmentation 2. RANSAC plane detection 3. Fit oriented BBoxes to plane points
- 10. Geometry-based Tag-Plane Matching • We assume that most tags are placed on a plane in the environment • We establish tag-plane correspondences to determine the tag-map transformation Detecting planes in the environment 1. Region growing segmentation 2. RANSAC plane detection 3. Fit oriented BBoxes to plane points Plane = (center, normal, lengths)
- 11. Max-Clique-based Correspondence Estimation • Tag-Plane Correspondence Consistency Graph Vertex: tag-plane correspondence hypothesis Edge: consistency between correspondence hypotheses ℎ𝑖𝑗 does not contradict ℎ𝑘𝑙 (i.e., they are consistent) Tag i corresponds to plane j Tag k corresponds to plane l ℎ𝑖𝑗 ℎ𝑘𝑙
- 12. Max-Clique-based Correspondence Estimation • Tag-Plane Correspondence Consistency Graph Vertex: tag-plane correspondence hypothesis Edge: consistency between correspondence hypotheses ℎ𝑖𝑗 ℎ𝑘𝑙
- 13. Max-Clique-based Correspondence Estimation • Tag-Plane Correspondence Consistency Graph Vertex: tag-plane correspondence hypothesis Edge: consistency between correspondence hypotheses • Largest subset of hypotheses that are all mutually consistent (i.e., maximum clique) gives the best explanation for the tag placement in the given map ℎ𝑖𝑗 ℎ𝑘𝑙
- 14. Tag-Plane Correspondence Consistency • Consistency between tag-plane correspondence hypotheses is determined based on geometric consistency check ℎ𝑖𝑗 ℎ𝑘𝑙 Tag i Tag k Plane j Plane l
- 15. Tag-Plane Correspondence Consistency • Consistency between tag-plane correspondence hypotheses is determined based on geometric consistency check • We align tag i and plane j and s.t. distance between tag k and plane l Plane j Plane l
- 16. Tag-Plane Correspondence Consistency • Consistency between tag-plane correspondence hypotheses is determined based on geometric consistency check • We align tag i and plane j and s.t. distance between tag k and plane l • If normal and translation errors between tag k and plane l are smaller than threshold, these hypotheses are mutually consistent Plane j Plane l Normal error Translation error
- 17. Example Result Planes Tags • While the consistency graph contains many edges, the max-clique can be found very efficiently [Rossi, 2015]
- 18. Example Result Planes Tags Consistency graph contains 429,735 hypothesis pairs • While the consistency graph contains many edges, the max-clique can be found very efficiently [Rossi, 2015]
- 19. Example Result Planes Tags Consistency graph contains 429,735 hypothesis pairs Maximum clique consists of 56 tag-plane correspondences found in 92 msec • While the consistency graph contains many edges, the max-clique can be found very efficiently [Rossi, 2015] • Given the tag-plane correspondences, we estimate the tag-map transformation by minimizing normal-to-normal ICP distance [Rusinkiewicz, 2019]
- 20. Estimation Refinement • We refine the tag poses by directly aligning agile camera images with the map VIO Tag detections Pose graph Direct alignment
- 21. Estimation Refinement • We refine the tag poses by directly aligning agile camera images with the map • We use the normalized information distance (NID), a mutual information-based cross modal metric, to maximize the co-occurrence of pixel and map intensity values • Tag and camera poses are re-optimized under all the constraints Agile camera image Map rendered with optimized camera pose
- 22. Evaluation in Simulation • The method is evaluated on the Replica dataset [Savva, 2019] Global tag-map registration : 0.039m / 1.021° Tag localization accuracy : 98% success rate Baseline (FPFH+RANSAC/Teaser) : 26% and 70% Robustness to outlier tags
- 23. Evaluation in Real Environment • 117 tags were placed in the environment • Tag poses were estimated in 22 minutes (16 min for VIO recording, 6 min for post processing) • Average tag pose error: 0.019m and 2.382° Final estimation result
- 24. Thank you for your attention!! 24
- 25. Conclusion • An accurate and scalable method for fiducial tag localization on a 3D prior environmental map is proposed • VIO-based tag relative pose estimation via landmark SLAM • Global tag-map registration based on tag-plane correspondence estimation via maximum clique finding • Estimation refinement via NID-based direct camera-map alignment • The proposed method could localize over 100 tags in 22 minutes • The average tag localization error was about 2 cm