
![ A singular point is an equilibrium point in the phase
plane.
Since an equilibrium point is defined as a point where the
system states can stay forever, this implies that ẋ = 0 .
Consider a general time invariant system described by
the state equation
ẋ = f(x,u) …[1 ]
SINGULAR POINT](https://image.slidesharecdn.com/act44-170410170926/85/SINGULAR-POINT-IN-NON-LINEAR-SYSTEM-2-320.jpg)
![ If the input vector u is constant, it is possible to write the
above equation in the form
ẋ = F(X) …[2]
A system represented by an equation of this form is called
autonomous system.
For such system, consider the points in the phase-space at
which the derivate of the all state variable are zero. Such
points are called singular points.](https://image.slidesharecdn.com/act44-170410170926/85/SINGULAR-POINT-IN-NON-LINEAR-SYSTEM-3-320.jpg)








SINGULAR POINT IN NON-LINEAR SYSTEM
- 1. Presented By: Pathak Anish (130410117044) Guided by: Prof. Krupa Narwekar Instrumentation & Control ADVANCE CONTROL THEORY (2181705)
- 2. A singular point is an equilibrium point in the phase plane. Since an equilibrium point is defined as a point where the system states can stay forever, this implies that ẋ = 0 . Consider a general time invariant system described by the state equation ẋ = f(x,u) …[1 ] SINGULAR POINT
- 3. If the input vector u is constant, it is possible to write the above equation in the form ẋ = F(X) …[2] A system represented by an equation of this form is called autonomous system. For such system, consider the points in the phase-space at which the derivate of the all state variable are zero. Such points are called singular points.
- 4. Singular points are very important features on the phase plane. Consider a time invariant second order system described by eq of the form ẋ=X2 ; ẋ2 = f(x1,x2) Now using Taylor series expansion , eq can be ẋ=X2 ẋ2 = ax1+bx2+g2(x1,x2) Where g2(.) contains higher order terms
- 5. The higher ordered terms can be neglected and therefore, the nonlinear system trajectories essentially satisfy the linearized eq ẋ=X2 ẋ2 = ax1+bx2 Transforming these eq into a scalar second order eq 𝒙1 =ax1+bẋ1 Therefore, we will consider the second order linear system described by
- 7. • In the following ,we discuss the behaviors of the trajectories of this point with undefined slope.
- 8. Eigenvalues (λ1, λ2) are both real and negative are shown in fig (a). The nature of the trajectories is shown in fig (b). They all converge to origin, which then called a nodel point. Nodal Point
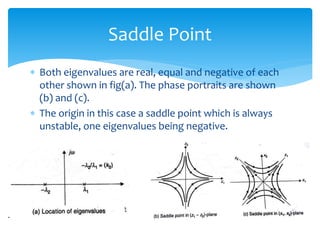
- 9. Both eigenvalues are real, equal and negative of each other shown in fig(a). The phase portraits are shown (b) and (c). The origin in this case a saddle point which is always unstable, one eigenvalues being negative. Saddle Point
- 10. The origin is the focus point and stable/unstable for negative/positive real parts of the eigenvalues. Let the eigenvalues be λ1, λ2 = σ ± j ω = complex conjugate pair Focus Point
- 11. The phase portrait has closed paths trajectories shown in fig (a) & (b) and the origin is called a Centre. The system is limitedly stable. λ1, λ2 = ± j ω = on the imaginary axis Centre or Vortex Point
- 12. THANK YOU