



































































![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Vetor
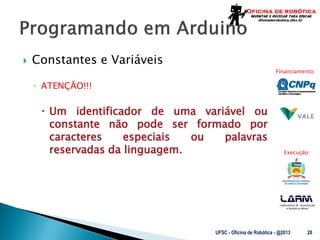
A declaração de um vetor é feita da mesma
maneira que uma variável escalar, entretanto é
necessário definir a quantidade de itens do
vetor.
Exemplo:
int vetor[4];
Vetor com 4 (quatro) elementos do tipo inteiro.
UFSC - Oficina de Robótica - @2013 76
7 8 1 3
0 1 32
Vetor
Dado armazenado
Índices](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-76-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
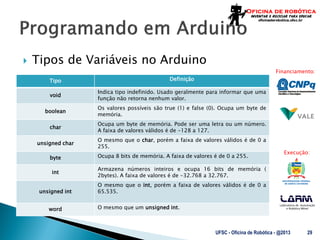
◦ Vetor
Para atribuir um valor a uma determinada
posição do vetor, basta usar o índice, ou seja, a
posição onde o valor será armazenado no
vetor.
Exemplo:
vetor[0] = 7;
Atribui o valor 7 a posição 0 do vetor.
UFSC - Oficina de Robótica - @2013 77
7 8 1 3
0 1 32](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-77-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
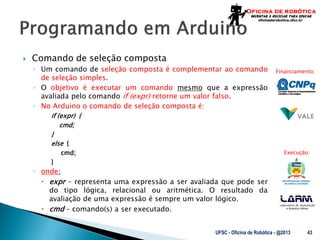
◦ Vetor
Para acessar um determinado valor em uma
posição do vetor, basta usar o índice, ou seja, a
posição onde o valor está armazenado no vetor.
Exemplo:
digitalWrite(vetor[0], HIGH);
Ativa a porta cujo número está definido na
posição 0 do vetor.
UFSC - Oficina de Robótica - @2013 78
7 8 1 3
0 1 32](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-78-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Vetor
Exemplo: acendendo e apagando leds cujas
portas estão definidas em um vetor
UFSC - Oficina de Robótica - @2013 79
int leds[5] = {2, 3, 4, 5, 6}; // Define as portas onde estão os leds
void setup()
{
int i;
for (i = 0; i < 5; i++) {
pinMode(leds[i], OUTPUT); // Define as portas como saída
}
}
void loop()
{
int i;
for (i = 0; i < 5; i++) {
digitalWrite(leds[i], HIGH); // Acende os leds
delay(1000);
}
for (i = 0; i < 5; i++) {
digitalWrite(leds[i], LOW); // Apaga os leds
delay(1000);
}
}](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-79-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Matriz
Uma matriz é similar a um vetor, entretanto pode ser formada
por duas ou mais dimensões.
Uma matriz bidimensional possui um determinado número de
linhas e de colunas.
Exemplo:
int matriz[4][6];
Matriz com 4 (quatro) linhas e 6 (seis) colunas de elementos
do tipo inteiro.
UFSC - Oficina de Robótica - @2013 80
1 2 3 4 5 6
7 8 9 10 11 12
13 14 15 16 17 18
19 20 21 22 23 24
0 1 2 3 4 5
0
1
2
3
Índices
Valor armazenado
na posição [3,0]](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-80-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Matriz
Para atribuir um valor a uma determinada
posição da matriz, basta usar o índice da linha
e o índice da coluna, ou seja, a posição onde o
valor será armazenado na matriz.
Exemplo:
matriz[1][2] = 9;
Atribui o valor 9 a posição 1 (linha), 2 (coluna) da
matriz.
UFSC - Oficina de Robótica - @2013 81](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-81-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Matriz
Para acessar um determinado valor em uma
posição da matriz, basta usar o índice da linha
e o da coluna, ou seja, a posição onde o valor
está armazenado na matriz.
Exemplo:
digitalWrite(matriz[0][0], HIGH);
Ativa a porta cujo número está definido na
posição 0 (linha), 0 (coluna) da matriz.
UFSC - Oficina de Robótica - @2013 82](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-82-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Vetores e matrizes
◦ Matriz
Exemplo: acendendo e apagando leds
aleatoriamente em uma matriz
UFSC - Oficina de Robótica - @2013 83
int matriz_leds[2][2] = {{2, 3}, {4, 5}};
void setup()
{
int i, j;
for (i = 0; i < 2; i++) {
for (j = 0; j < 2; j++) {
// Inicializa portas
pinMode(matriz_leds[i][j], OUTPUT);
}
}
randomSeed(analogRead(0)); // Define uma semente a partir da porta ananlógica 0
}
void loop()
{
int linha, coluna;
linha = random(2); // Gera um número aleatório entre 0 e 1
coluna = random(2); // Gera um número aleatório entre 0 e 1
// Acende led
digitalWrite(matriz_leds[linha][coluna], HIGH);
delay(500);
// Apaga led
digitalWrite(matriz_leds[linha][coluna], LOW);
delay(500);
}](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-83-320.jpg)


![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Modularizando um Programa – funções
◦ Exemplo: programa para acionar 4 (quatro)
leds usando funções (dispostos em matriz)
UFSC - Oficina de Robótica - @2013 86
int matriz_leds[2][2] = {{5, 4}, {2, 3}};
void pisca_diagonal_principal() // função para controlar os leds da diagonal principal
{
digitalWrite(matriz_leds[0][0], HIGH);
digitalWrite(matriz_leds[1][1], HIGH);
delay(1000);
digitalWrite(matriz_leds[0][0], LOW);
digitalWrite(matriz_leds[1][1], LOW);
delay(1000);
}
void pisca_diagonal_secundaria() // função para controlar os leds da diagonal secundária
{
digitalWrite(matriz_leds[0][1], HIGH);
digitalWrite(matriz_leds[1][0], HIGH);
delay(1000);
digitalWrite(matriz_leds[0][1], LOW);
digitalWrite(matriz_leds[1][0], LOW);
delay(1000);
}](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-86-320.jpg)
![Laboratório de Automação
e Robótica Móvel
Financiamento:
Execução:
Modularizando um Programa – funções
◦ Exemplo: programa para acionar 4 (quatro)
leds usando funções (dispostos em matriz)
UFSC - Oficina de Robótica - @2013 87
void setup()
{
int i, j;
for (i = 0; i < 2; i++) {
for (j = 0; j < 2; j++) {
// Inicializa portas
pinMode(matriz_leds[i][j], OUTPUT);
}
}
}
void loop()
{
pisca_diagonal_principal();
pisca_diagonal_secundaria();
}](https://image.slidesharecdn.com/programao-em-arduino-mdulo-bsico-161109104413/85/Programacao-em-arduino-modulo-basico-87-320.jpg)








Programação em-arduino-módulo-básico
- 1. Financiamento: Execução: Laboratório de Automação e Robótica Móvel Programação em Arduino Módulo Básico
- 2. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Material produzido para o projeto Oficina de Robótica por: ◦ Anderson Luiz Fernandes Perez ◦ Renan Rocha Darós Contatos: ◦ Universidade Federal de Santa Catarina - Laboratório de Automação e Robótica Móvel anderson.perez (at) ufsc.br renanrdaros (at) hotmail.com http://oficinaderobotica.ufsc.br UFSC - Oficina de Robótica - @2013 2
- 3. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Introdução Microcontroladores Arduino UNO Ambiente de desenvolvimento Funções setup() e loop() Monitor Serial Portas digitais e analógicas Programando em Arduino Expandindo as funcionalidades do Arduino UFSC - Oficina de Robótica - @2013 3
- 4. Laboratório de Automação e Robótica Móvel Financiamento: Execução: O Arduino é uma plataforma utilizada para prototipação de circuitos eletrônicos. O projeto do Arduino teve início em 2005 na cidade de Ivrea, Itália. O Arduino é composto por uma placa com microcontrolador Atmel AVR e um ambiente de programação baseado em Wiring e C++. Tanto o hardware como o ambiente de programação do Arduino são livres, ou seja, qualquer pessoa pode modificá-los e reproduzi-los. O Arduino também é conhecido de plataforma de computação física. UFSC - Oficina de Robótica - @2013 4
- 5. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Tipos de Arduino ◦ Existem vários tipos de Arduino com especificidades de hardware. O site oficial do Arduino lista os seguintes tipos: Arduino UNO Arduino Leonardo Arduino Due Arduino Esplora Arduino Mega Arduino Mega ADK Arduino Ethernet Arduino Mini Arduino LilyPad Arduino Micro Arduino Nano Arduino ProMini Arduino Pro Arduino Fio UFSC - Oficina de Robótica - @2013 5
- 6. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Referências na WEB: ◦ O site oficial do Arduino é http://arduino.cc ◦ Um documentário sobre o Arduino pode ser assistido em: http://arduinothedocumentary.org/ UFSC - Oficina de Robótica - @2013 6
- 7. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Um microcontrolador é um CI que incorpora várias funcionalidades. Alguns vezes os microcontroladores são chamados de “computador de um único chip”. São utilizados em diversas aplicações de sistemas embarcados, tais como: carros, eletrodomésticos, aviões, automação residencial, etc. UFSC - Oficina de Robótica - @2013 7
- 8. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Processamento de dados UFSC - Oficina de Robótica - @2013 8 Entrada Processamento Saída
- 9. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vista da placa do Arduino UNO Rev 3 (frente e verso) UFSC - Oficina de Robótica - @2013 9
- 10. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Características ◦ Microcontrolador: ATmega328 ◦ Tensão de operação: 5V ◦ Tensão recomendada (entrada): 7-12V ◦ Limite da tensão de entrada: 6-20V ◦ Pinos digitais: 14 (seis pinos com saída PWM) ◦ Entrada analógica: 6 pinos ◦ Corrente contínua por pino de entrada e saída: 40 mA ◦ Corrente para o pino de 3.3 V: 50 mA ◦ Quantidade de memória FLASH: 32 KB (ATmega328) onde 0.5 KB usado para o bootloader ◦ Quantidade de memória SRAM: 2 KB (ATmega328) ◦ Quantidade de memória EEPROM: 1 KB (ATmega328) ◦ Velocidade de clock: 16 MHz UFSC - Oficina de Robótica - @2013 10
- 11. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Alimentação ◦ O Arduino UNO pode ser alimentado pela porta USB ou por uma fonte externa DC. ◦ A recomendação é que a fonte externa seja de 7 V a 12 V e pode ser ligada diretamente no conector de fonte ou nos pinos Vin e Gnd. UFSC - Oficina de Robótica - @2013 11
- 12. Laboratório de Automação e Robótica Móvel Financiamento: Execução: O ambiente de desenvolvimento do Arduino (IDE) é gratuito e pode ser baixado no seguinte endereço: arduino.cc. As principais funcionalidades do IDE do Arduino são: ◦ Escrever o código do programa ◦ Salvar o código do programa ◦ Compilar um programa ◦ Transportar o código compilado para a placa do Arduino UFSC - Oficina de Robótica - @2013 12
- 13. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Interface principal do ambiente de desenvolvimento UFSC - Oficina de Robótica - @2013 13
- 14. Laboratório de Automação e Robótica Móvel Financiamento: Execução: As duas principais partes (funções) de um programa desenvolvido para o Arduino são: ◦ setup(): onde devem ser definidas algumas configurações iniciais do programa. Executa uma única vez. ◦ loop(): função principal do programa. Fica executando indefinidamente. Todo programa para o Arduino deve ter estas duas funções. UFSC - Oficina de Robótica - @2013 14
- 15. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo 1: formato das funções setup() e loop() UFSC - Oficina de Robótica - @2013 15 void setup() { } void loop() { }
- 16. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo 2: exemplo funções setup() e loop() UFSC - Oficina de Robótica - @2013 16 void setup() { pinMode(13, OUTPUT); } void loop() { digitalWrite(13, HIGH); delay(1000); digitalWrite(13, LOW); delay(1000); }
- 17. Laboratório de Automação e Robótica Móvel Financiamento: Execução: O monitor serial é utilizado para comunicação entre o Arduino e o computador (PC). O monitor serial pode ser aberto no menu tools opção serial monitor, ou pressionando as teclas CTRL + SHIFT + M. As principais funções do monitor serial são: begin(), read(), write(), print(), println() e available(). UFSC - Oficina de Robótica - @2013 17
- 18. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo: imprimindo uma mensagem de boas vindas no monitor serial UFSC - Oficina de Robótica - @2013 18 void setup() { Serial.begin(9600); // Definição da velocide de transmissão } void loop() { Serial.println("Ola, seu nome, seja bem vindo ao maravilhoso mundo do Arduino"); }
- 19. Laboratório de Automação e Robótica Móvel Financiamento: Execução: O Arduino possui tanto portas digitais como portas analógicas. As portas servem para comunicação entre o Arduino e dispositivos externos, por exemplo: ler um botão, acender um led ou uma lâmpada. Conforme já mencionado, o Arduino UNO, possui 14 portas digitais e 6 portas analógicas (que também podem ser utilizadas como portas digitais). UFSC - Oficina de Robótica - @2013 19
- 20. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Portas Digitais ◦ As portas digitais trabalham com valores bem definidos, ou seja, no caso do Arduino esses valores são 0V e 5V. ◦ 0V indica a ausência de um sinal e 5V indica a presença de um sinal. ◦ Para escrever em uma porta digital basta utilizar a função digitalWrite(pin, estado). ◦ Para ler um valor em uma porta digital basta utilizar a função digitalRead(pin). UFSC - Oficina de Robótica - @2013 20
- 21. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Portas Analógicas ◦ As portas analógicas são utilizadas para entrada de dados. ◦ Os valores lidos em uma porta analógica variam de 0V a 5V. ◦ Para ler uma valor em uma porta analógica basta utilizar a função analogRead(pin). ◦ Os conversores analógicos-digitais (ADC) do Arduino são de 10 bits. ◦ Os conversores ADC (do Inglês Analog Digital Converter) permitem uma precisão de 0.005V ou 5mV. ◦ Os valores lidos em uma porta analógica variam de 0 a 1023 (10 bits), onde 0 representa 0V e 1023 representa 5V. UFSC - Oficina de Robótica - @2013 21
- 22. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Para definir uma porta como entrada ou saída é necessário explicitar essa situação no programa. A função pinMode(pin, estado) é utilizada para definir se a porta será de entrada ou saída de dados. Exemplo: ◦ Define que a porta 13 será de saída pinMode(13, OUTPUT) ◦ Define que a porta 7 será de entrada pinMode(7, INPUT) UFSC - Oficina de Robótica - @2013 22
- 23. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Algoritmo ◦ Sequência de passos que visa atingir um objetivo bem definido. ◦ Exemplo: Receita caseira UFSC - Oficina de Robótica - @2013 23
- 24. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Constantes e Variáveis ◦ Um dado é constante quando não sofre nenhuma variação no decorrer do tempo. ◦ Do início ao fim do programa o valor permanece inalterado. ◦ Exemplos: 10 “Bata antes de entrar!” -0,58 UFSC - Oficina de Robótica - @2013 24
- 25. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Constantes e Variáveis ◦ A criação de constantes no Arduino pode ser feita de duas maneiras: Usando a palavra reservada const Exemplo: const int x = 100; Usando a palavra reservada define Exemplo: #define X 100 UFSC - Oficina de Robótica - @2013 25
- 26. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Constantes e Variáveis ◦ No Arduino existem algumas constantes previamente definidas e são consideradas palavras reservadas. ◦ As constantes definidas são: true – indica valor lógico verdadeiro false – indica valor lógico falso HIGH – indica que uma porta está ativada, ou seja, está em 5V. LOW – indica que uma porta está desativada, ou seja, está em 0V. INPUT – indica que uma porta será de entrada de dados. OUTPUT – indica que uma porta será de saída de dados. UFSC - Oficina de Robótica - @2013 26
- 27. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Constantes e Variáveis ◦ Variáveis são lugares (posições) na memória principal que servem para armazenar dados. ◦ As variáveis são acessadas através de um identificador único. ◦ O conteúdo de uma variável pode variar ao longo do tempo durante a execução de um programa. ◦ Uma variável só pode armazenar um valor a cada instante. ◦ Um identificador para uma variável é formado por um ou mais caracteres, obedecendo a seguinte regra: o primeiro caractere deve, obrigatoriamente, ser uma letra. UFSC - Oficina de Robótica - @2013 27
- 28. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Constantes e Variáveis ◦ ATENÇÃO!!! Um identificador de uma variável ou constante não pode ser formado por caracteres especiais ou palavras reservadas da linguagem. UFSC - Oficina de Robótica - @2013 28
- 29. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Tipos de Variáveis no Arduino UFSC - Oficina de Robótica - @2013 29 Tipo Definição void Indica tipo indefinido. Usado geralmente para informar que uma função não retorna nenhum valor. boolean Os valores possíveis são true (1) e false (0). Ocupa um byte de memória. char Ocupa um byte de memória. Pode ser uma letra ou um número. A faixa de valores válidos é de -128 a 127. unsigned char O mesmo que o char, porém a faixa de valores válidos é de 0 a 255. byte Ocupa 8 bits de memória. A faixa de valores é de 0 a 255. int Armazena números inteiros e ocupa 16 bits de memória ( 2bytes). A faixa de valores é de -32.768 a 32.767. unsigned int O mesmo que o int, porém a faixa de valores válidos é de 0 a 65.535. word O mesmo que um unsigned int.
- 30. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Tipos de Variáveis no Arduino UFSC - Oficina de Robótica - @2013 30 Tipo Definição long Armazena números de até 32 bits (4 bytes). A faixa de valores é de -2.147.483.648 até 2.147.483.647. unsigned long O mesmo que o long, porém a faixa de valores é de 0 até 4.294.967.295. short Armazena número de até 16 bits (2 bytes). A faixa de valores é de -32.768 até 32.767. float Armazena valores de ponto flutuante (com vírgula) e ocupa 32 bits (4 bytes) de memória. A faixa de valores é de -3.4028235E+38 até 3.4028235E+38 double O mesmo que o float.
- 31. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Declaração de Variáveis e Constantes ◦ Exemplo: declaração de duas constantes e uma variável UFSC - Oficina de Robótica - @2013 31 #define BOTAO 10 // constante const int pin_botao = 13; // constante void setup() { } void loop() { int valor_x; // variável }
- 32. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Atribuição de valores a variáveis e constantes ◦ A atribuição de valores a variáveis e constantes é feito com o uso do operador de atribuição =. ◦ Exemplos: int valor = 100; const float pi = 3.14; ◦ Atenção!!! O operador de atribuição não vale para o comando #define. UFSC - Oficina de Robótica - @2013 32
- 33. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Atribuição de valores a variáveis e constantes ◦ Exemplo: lendo dados do monitor serial UFSC - Oficina de Robótica - @2013 33 int valor = 0; void setup() { Serial.begin(9600); // Definição da velocidade de transmissão } void loop() { Serial.println("Digite um numero "); valor = Serial.read(); // leitura de dados do monitor serial Serial.print("O numero digitado foi "); Serial.write(valor); Serial.println(); delay(2000); // Aguarda por 2 segundos }
- 34. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Operadores ◦ Em uma linguagem de programação existem vários operadores que permitem operações do tipo: Aritmética Relacional Lógica Composta UFSC - Oficina de Robótica - @2013 34
- 35. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Operadores aritméticos UFSC - Oficina de Robótica - @2013 35 Símbolo Função + Adição - Subtração * Multiplicação / Divisão % Módulo (resto da divisão inteira)
- 36. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Operadores relacionais UFSC - Oficina de Robótica - @2013 36 Símbolo Função > Maior < Menor >= Maior ou igual <= Menor ou igual == Igual != Diferente
- 37. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Operadores lógicos UFSC - Oficina de Robótica - @2013 37 Símbolo Função && E (and) || OU (or) ! Não (not)
- 38. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Operadores compostos UFSC - Oficina de Robótica - @2013 38 Símbolo Função ++ Incremento -- Decremento += Adição com atribuição -= Subtração com atribuição *= Multiplicação com atribuição /= Divisão com atribuição
- 39. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comentários ◦ Muitas vezes é importante comentar alguma parte do código do programa. ◦ Existem duas maneiras de adicionar comentários a um programa em Arduino. ◦ A primeira é usando //, como no exemplo abaixo: // Este é um comentário de linha ◦ A segunda é usando /* */, como no exemplo abaixo: /* Este é um comentário de bloco. Permite acrescentar comentários com mais de uma linha */ ◦ Nota: Quando o programa é compilado os comentários são automaticamente suprimidos do arquivo executável, aquele que será gravado na placa do Arduino. UFSC - Oficina de Robótica - @2013 39
- 40. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Seleção ◦ Em vários momentos em um programa precisamos verificar uma determinada condição afim de selecionar uma ação ou ações que serão executadas. ◦ Um comando de seleção também é conhecido por desvio condicional, ou seja, dada um condição, um parte do programa é executada. ◦ Os comandos de seleção podem ser do tipo: Seleção simples Seleção composta Seleção de múltipla escolha UFSC - Oficina de Robótica - @2013 40
- 41. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção simples ◦ Um comando de seleção simples avalia uma condição, ou expressão, para executar uma ação ou conjunto de ações. ◦ No Arduino o comando de seleção simples é: if (expr) { cmd } ◦ onde: expr – representa uma expressão a ser avaliada que pode ser do tipo lógica, relacional ou aritmética. O resultado da avaliação de uma expressão é sempre um valor lógico. cmd – comando(s) a ser executado. UFSC - Oficina de Robótica - @2013 41
- 42. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção simples ◦ Exemplo: acendendo leds pelo monitor serial UFSC - Oficina de Robótica - @2013 42 const int led_vermelho = 5; const int led_verde = 6; const int led_amarelo = 7; char led; void setup() { pinMode(led_vermelho, OUTPUT); pinMode(led_verde, OUTPUT); pinMode(led_amarelo, OUTPUT); Serial.begin(9600); } void loop() { if (Serial.available()) { led = Serial.read(); if (led == 'R') { // Led vermelho - red digitalWrite(led_vermelho, HIGH); // Acende led } if (led == 'G') { // Led verde - green digitalWrite(led_verde, HIGH); // Acende led } if (led == 'Y') { // Led amarelo - yellow digitalWrite(led_amarelo, HIGH); // Acende led } } }
- 43. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção composta ◦ Um comando de seleção composta é complementar ao comando de seleção simples. ◦ O objetivo é executar um comando mesmo que a expressão avaliada pelo comando if (expr) retorne um valor falso. ◦ No Arduino o comando de seleção composta é: if (expr) { cmd; } else { cmd; } ◦ onde: expr – representa uma expressão a ser avaliada que pode ser do tipo lógica, relacional ou aritmética. O resultado da avaliação de uma expressão é sempre um valor lógico. cmd – comando(s) a ser executado. UFSC - Oficina de Robótica - @2013 43
- 44. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção composta ◦ Exemplo: acendendo e apagando leds pelo monitor serial UFSC - Oficina de Robótica - @2013 44 const int led_vermelho = 5; const int led_verde = 6; const int led_amarelo = 7; char led; void setup() { pinMode(led_vermelho, OUTPUT); pinMode(led_verde, OUTPUT); pinMode(led_amarelo, OUTPUT); Serial.begin(9600); }
- 45. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção composta ◦ Exemplo: acendendo e apagando leds pelo monitor serial UFSC - Oficina de Robótica - @2013 45 void loop() { if (Serial.available()) { led = Serial.read(); if (led == 'R') { // Led vermelho - red digitalWrite(led_vermelho, HIGH); // Acende led } else { if (led == 'r') { digitalWrite(led_vermelho, LOW); // Apaga led } } if (led == 'G') { // Led verde - green digitalWrite(led_verde, HIGH); // Acende led } else { if (led == 'g') { digitalWrite(led_verde, LOW); // Apaga led } } if (led == 'Y') { // Led amarelo - yellow digitalWrite(led_amarelo, HIGH); // Acende led } else { if (led == 'y') { digitalWrite(led_amarelo, LOW); // Apaga led } } } }
- 46. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção de múltipla escolha ◦ Na seleção de múltipla escolha é possível avaliar mais de um valor. ◦ No Arduino o comando de seleção de múltipla escolha é: switch (valor) { case x: cmd1; break; case y: cmd2; break; default: cmd; } ◦ onde: valor – é um dado a ser avaliado. É representado por uma variável de memória. cmdx – comando a ser executado. case– indica a opção a ser executada. default – comando padrão que deverá ser executado se nenhuma outra escolha (case) tiver sido selecionada. UFSC - Oficina de Robótica - @2013 46
- 47. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção de múltipla escolha ◦ Exemplo: acendendo e apagando leds pelo monitor serial UFSC - Oficina de Robótica - @2013 47 const int led_vermelho = 5; const int led_verde = 6; const int led_amarelo = 7; char led; void setup() { pinMode(led_vermelho, OUTPUT); pinMode(led_verde, OUTPUT); pinMode(led_amarelo, OUTPUT); Serial.begin(9600); }
- 48. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comando de seleção de múltipla escolha ◦ Exemplo: acendendo e apagando leds pelo monitor serial UFSC - Oficina de Robótica - @2013 48 void loop() { if (Serial.available()) { led = Serial.read(); switch (led) { case 'R': digitalWrite(led_vermelho, HIGH); // Acende led break; case 'r': digitalWrite(led_vermelho, LOW); // Apaga led break; case 'G': digitalWrite(led_verde, HIGH); // Acende led break; case 'g': digitalWrite(led_verde, LOW); // Apaga led break; case 'Y': digitalWrite(led_amarelo, HIGH); // Acende led break; case 'y': digitalWrite(led_amarelo, LOW); // Apaga led break; default: Serial.println("Nenhum led selecionado!!!"); } } }
- 49. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo um botão ◦ Para ler um botão basta ligá-lo em uma porta digital. ◦ Para que um circuito com botão funcione adequadamente, ou seja, sem ruídos, é necessário o uso de resistores pull-down ou pull-up. ◦ Os resistores pull-down e pull-up garantem que os níveis lógicos estarão próximos às tensões esperadas. UFSC - Oficina de Robótica - @2013 49
- 50. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Resistor pull-down 10K Lendo um botão com resistor pull-down ◦ Ligação no protoboard UFSC - Oficina de Robótica - @2013 50
- 51. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo um botão com resistor pull- down ◦ Programa UFSC - Oficina de Robótica - @2013 51 const int botao = 8; boolean vlr_btn = false; void setup() { pinMode(botao, INPUT); Serial.begin(9600); } void loop() { vlr_btn = digitalRead(botao); if (vlr_btn == true) { Serial.println("Botao pressionado!!!"); } }
- 52. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Resistor pull-up 10K Lendo um botão com resistor pull-up ◦ Ligação no protoboard UFSC - Oficina de Robótica - @2013 52
- 53. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo um botão com resistor pull-up ◦ Programa UFSC - Oficina de Robótica - @2013 53 const int botao = 8; boolean vlr_btn = false; void setup() { pinMode(botao, INPUT); Serial.begin(9600); } void loop() { vlr_btn = digitalRead(botao); if (vlr_btn == false) { Serial.println("Botao pressionado!!!"); } }
- 54. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Nota ◦ O Arduino possui resistores pull-up nas portas digitais, e estes variam de 20K a 50K. ◦ Para ativar os resistores pull-up de uma porta digital basta defini-la como entrada e colocá-la em nível alto (HIGH) na função setup(). pinMode(pin, INPUT) digitalWrite(pin, HIGH) ◦ Para desativar os resistores pull-up de uma porta digital basta colocá-la em nível baixo. digitalWrite(pin, LOW) UFSC - Oficina de Robótica - @2013 54
- 55. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo: ativando o resistor pull-up de uma porta digital ◦ Quanto o botão for pressionado o led irá apagar UFSC - Oficina de Robótica - @2013 55
- 56. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo: ativando o resistor pull-up de uma porta digital ◦ Quanto o botão for pressionado o led irá apagar UFSC - Oficina de Robótica - @2013 56 const int led = 7; const int botao = 10; void setup() { pinMode(led, OUTPUT); pinMode(botao, INPUT); digitalWrite(botao, HIGH); // Ativa resistor pull-up } void loop() { int valor = digitalRead(botao); if (valor == HIGH) { digitalWrite(led, HIGH); // Acende o led } else { digitalWrite(led, LOW); // Apaga o led } }
- 57. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo: ativando o resistor pull-up de uma porta digital ◦ Nota: O Arduino possui uma constante chamada INPUT_PULLUP que define que a porta será de entrada e o resistor pull-up da mesma será ativado. Exemplo: void setup() { pinMode(10, INPUT_PULLUP); } UFSC - Oficina de Robótica - @2013 57 Define a porta 10 como entrada de dados e ativa o resistor pull-up.
- 58. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ O Arduino UNO possui 6 (seis) portas analógicas. ◦ Por padrão todas as portas analógicas são definidas como entrada de dados, desta forma não é necessário fazer esta definição na função setup(). ◦ O conversor analógico-digital do Arduino é de 10 (dez) bits, logo a faixa de valores lidos varia de 0 a 1023. ◦ As portas analógicas no Arduino UNO são identificadas como A0, A1, A2, A3, A4 e A5. Estas portas também podem ser identificadas por 14 (A0), 15 (A1), 16 (A2), 17 (A3), 18 (A4) e 19 (A5). UFSC - Oficina de Robótica - @2013 58
- 59. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo dados de um potenciômetro UFSC - Oficina de Robótica - @2013 59
- 60. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo dados de um potenciômetro UFSC - Oficina de Robótica - @2013 60 void setup() { Serial.begin(9600); } void loop() { int val = analogRead(0); Serial.println(val); }
- 61. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo dados de um potenciômetro e acionando um LED UFSC - Oficina de Robótica - @2013 61
- 62. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo dados de um potenciômetro e acionando um LED UFSC - Oficina de Robótica - @2013 62 const int led = 6; void setup() { pinMode(led, OUTPUT); Serial.begin(9600); } void loop() { int val = analogRead(0); Serial.println(val); digitalWrite(led, HIGH); delay(val); digitalWrite(led, LOW); delay(val); }
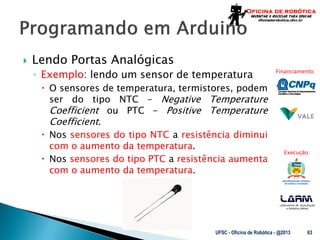
- 63. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo um sensor de temperatura O sensores de temperatura, termistores, podem ser do tipo NTC – Negative Temperature Coefficient ou PTC – Positive Temperature Coefficient. Nos sensores do tipo NTC a resistência diminui com o aumento da temperatura. Nos sensores do tipo PTC a resistência aumenta com o aumento da temperatura. UFSC - Oficina de Robótica - @2013 63
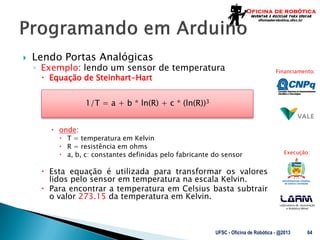
- 64. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo um sensor de temperatura Equação de Steinhart-Hart onde: T = temperatura em Kelvin R = resistência em ohms a, b, c: constantes definidas pelo fabricante do sensor Esta equação é utilizada para transformar os valores lidos pelo sensor em temperatura na escala Kelvin. Para encontrar a temperatura em Celsius basta subtrair o valor 273.15 da temperatura em Kelvin. UFSC - Oficina de Robótica - @2013 64 1/T = a + b * ln(R) + c * (ln(R))3
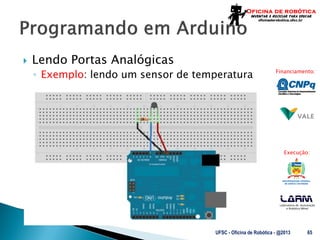
- 65. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo um sensor de temperatura UFSC - Oficina de Robótica - @2013 65
- 66. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo um sensor de temperatura UFSC - Oficina de Robótica - @2013 66 /* Programa que utiliza a equação de Steinhart-Hart 1/T = a + b * ln(R) + c * (ln(R))3 */ #include <math.h> const int sensor = A0; double tempCelsius(int valorNTC) { double temp; temp = log(((10240000 / valorNTC) - 10000)); // Considerando resistência de 10K temp = 1 / (0.001129148 + (0.000234125 + (0.0000000876741 * temp * temp ))* temp ); temp = temp - 273.15; // Converte Kelvin para Celsius return temp; }
- 67. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Lendo Portas Analógicas ◦ Exemplo: lendo um sensor de temperatura UFSC - Oficina de Robótica - @2013 67 void setup() { Serial.begin(9600); } void loop() { int valor = analogRead(sensor); double c = tempCelsius(valor); Serial.println(valor); Serial.println(c); delay(100); }
- 68. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Muitas vezes é necessário repetir uma determinada instrução mais de uma vez. ◦ Os comandos de repetição mantêm em um “laço” uma instrução ou conjunto de instruções. ◦ Os comandos de repetição do Arduino são: Baseado em um contador Baseado em uma expressão com teste no início Baseado em uma expressão com teste no final UFSC - Oficina de Robótica - @2013 68
- 69. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em um Contador Este tipo de comando de repetição deve ser utilizado quando se sabe a quantidade de vezes que uma determinada instrução deve ser executada. No Arduino o comando de repetição baseado em um contador é: for (contador início; expr; incremento do contador) { cmd; } onde: contador = é uma variável do tipo inteiro (int) expr = é uma expressão relacional incremento do contador = passo de incremento do contador UFSC - Oficina de Robótica - @2013 69
- 70. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em um Contador Exemplo: escrevendo uma mensagem x vezes no monitor serial UFSC - Oficina de Robótica - @2013 70 int vezes = 10; // Quantidade de vezes que a mensagem será impressa no monitor serial int executado = 0; // Quantidade de mensagens já impressas void setup() { Serial.begin(9600); } void loop() { for (executado; executado < vezes; executado++) { Serial.println("Testando o comando de repeticao for()"); } }
- 71. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em uma expressão com teste no início Este tipo de comando de repetição avalia uma expressão, caso seja verdadeira, a(s) intrução(ções) dentro do “laço” permanecem executando. No Arduino o comando de repetição baseado em uma expressão com teste no início é: while (expr) { cmd; } onde: expr – é uma expressão que pode ser lógica, relacional ou aritmética. A permanência de execução do “laço” é garantida enquanto a expressão for verdadeira. Nota: Neste tipo de comando de repetição a avaliação da expressão é realizada no início do laço, ou seja, pode ser que o cmd não execute nenhuma vez. UFSC - Oficina de Robótica - @2013 71
- 72. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em uma expressão com teste no início Exemplo: UFSC - Oficina de Robótica - @2013 72 const int botao = 6; const int led = 10; void setup() { pinMode(botao, INPUT); pinMode(led, OUTPUT); digitalWrite(botao, HIGH); // Ativa resistor pull-up } void loop() { // Teste do comando while() while (digitalRead(botao)); // Espera até que o botão seja pressionado digitalWrite(led, HIGH); delay(2000); digitalWrite(led, LOW); }
- 73. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em uma expressão com teste no final Este tipo de comando de repetição avalia uma expressão, caso seja verdadeira, a(s) intrução(ções) dentro do “laço” permanecem executando. No Arduino o comando de repetição baseado em uma expressão com teste no final é: do { cmd; } while (expr) ; onde: expr – é uma expressão que pode ser lógica, relacional ou aritmética. A permanência de execução do “laço” é garantida enquanto a expressão for verdadeira. Nota: Neste tipo de comando de repetição a avaliação da expressão é realizada no final do laço, ou seja, é garatido que pelo menos uma vez o cmd será executado. UFSC - Oficina de Robótica - @2013 73
- 74. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Comandos de Repetição ◦ Baseado em uma expressão com teste no final Exemplo: UFSC - Oficina de Robótica - @2013 74 const int botao = 6; const int led = 10; void setup() { pinMode(botao, INPUT); pinMode(led, OUTPUT); digitalWrite(botao, HIGH); // Ativa resistor pull-up } void loop() { // Teste do comando do while() do { digitalWrite(led, HIGH); delay(2000); digitalWrite(led, LOW); delay(2000); } while (digitalRead(botao)); // Enquanto o botão não for pressionado, pisca o led }
- 75. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Uma variável escalar pode armazenar muitos valores ao longo da execução do programa, porém não ao mesmo tempo. ◦ Existem variáveis que podem armazenar mais de um valor ao mesmo tempo. Essas variáveis são conhecidas como “variáveis compostas homogêneas”. ◦ No Arduino é possível trabalhar com dois tipos de variáveis compostas homogêneas, vetores e matrizes. UFSC - Oficina de Robótica - @2013 75
- 76. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Vetor A declaração de um vetor é feita da mesma maneira que uma variável escalar, entretanto é necessário definir a quantidade de itens do vetor. Exemplo: int vetor[4]; Vetor com 4 (quatro) elementos do tipo inteiro. UFSC - Oficina de Robótica - @2013 76 7 8 1 3 0 1 32 Vetor Dado armazenado Índices
- 77. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Vetor Para atribuir um valor a uma determinada posição do vetor, basta usar o índice, ou seja, a posição onde o valor será armazenado no vetor. Exemplo: vetor[0] = 7; Atribui o valor 7 a posição 0 do vetor. UFSC - Oficina de Robótica - @2013 77 7 8 1 3 0 1 32
- 78. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Vetor Para acessar um determinado valor em uma posição do vetor, basta usar o índice, ou seja, a posição onde o valor está armazenado no vetor. Exemplo: digitalWrite(vetor[0], HIGH); Ativa a porta cujo número está definido na posição 0 do vetor. UFSC - Oficina de Robótica - @2013 78 7 8 1 3 0 1 32
- 79. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Vetor Exemplo: acendendo e apagando leds cujas portas estão definidas em um vetor UFSC - Oficina de Robótica - @2013 79 int leds[5] = {2, 3, 4, 5, 6}; // Define as portas onde estão os leds void setup() { int i; for (i = 0; i < 5; i++) { pinMode(leds[i], OUTPUT); // Define as portas como saída } } void loop() { int i; for (i = 0; i < 5; i++) { digitalWrite(leds[i], HIGH); // Acende os leds delay(1000); } for (i = 0; i < 5; i++) { digitalWrite(leds[i], LOW); // Apaga os leds delay(1000); } }
- 80. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Matriz Uma matriz é similar a um vetor, entretanto pode ser formada por duas ou mais dimensões. Uma matriz bidimensional possui um determinado número de linhas e de colunas. Exemplo: int matriz[4][6]; Matriz com 4 (quatro) linhas e 6 (seis) colunas de elementos do tipo inteiro. UFSC - Oficina de Robótica - @2013 80 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 0 1 2 3 4 5 0 1 2 3 Índices Valor armazenado na posição [3,0]
- 81. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Matriz Para atribuir um valor a uma determinada posição da matriz, basta usar o índice da linha e o índice da coluna, ou seja, a posição onde o valor será armazenado na matriz. Exemplo: matriz[1][2] = 9; Atribui o valor 9 a posição 1 (linha), 2 (coluna) da matriz. UFSC - Oficina de Robótica - @2013 81
- 82. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Matriz Para acessar um determinado valor em uma posição da matriz, basta usar o índice da linha e o da coluna, ou seja, a posição onde o valor está armazenado na matriz. Exemplo: digitalWrite(matriz[0][0], HIGH); Ativa a porta cujo número está definido na posição 0 (linha), 0 (coluna) da matriz. UFSC - Oficina de Robótica - @2013 82
- 83. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Vetores e matrizes ◦ Matriz Exemplo: acendendo e apagando leds aleatoriamente em uma matriz UFSC - Oficina de Robótica - @2013 83 int matriz_leds[2][2] = {{2, 3}, {4, 5}}; void setup() { int i, j; for (i = 0; i < 2; i++) { for (j = 0; j < 2; j++) { // Inicializa portas pinMode(matriz_leds[i][j], OUTPUT); } } randomSeed(analogRead(0)); // Define uma semente a partir da porta ananlógica 0 } void loop() { int linha, coluna; linha = random(2); // Gera um número aleatório entre 0 e 1 coluna = random(2); // Gera um número aleatório entre 0 e 1 // Acende led digitalWrite(matriz_leds[linha][coluna], HIGH); delay(500); // Apaga led digitalWrite(matriz_leds[linha][coluna], LOW); delay(500); }
- 84. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Modularizando um Programa – funções ◦ O objetivo da modularização é separar o programa em módulos funcionais – “dividir para conquistar”. ◦ Um módulo pode ser chamado (acionado) em qualquer ponto do programa. ◦ Os módulos funcionais de um programa também são chamados de funções. ◦ Uma função implementa uma ou mais instruções responsáveis por uma parte do programa. ◦ As funções deixam um programa mais organizado e legível, uma vez que são responsáveis por ações bem específicas. UFSC - Oficina de Robótica - @2013 84
- 85. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Modularizando um Programa – funções ◦ Uma função tem quatro partes fundamentais, que são: um tipo de dado associado a ela (pode ser void); um nome; uma lista de parâmetros (se houver); conjunto de instruções. Exemplo: int soma(int a, int b) { int resultado= a + b; return resultado; } UFSC - Oficina de Robótica - @2013 85 Parâmetros Tipo de dado Nome Conjunto de instruções
- 86. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Modularizando um Programa – funções ◦ Exemplo: programa para acionar 4 (quatro) leds usando funções (dispostos em matriz) UFSC - Oficina de Robótica - @2013 86 int matriz_leds[2][2] = {{5, 4}, {2, 3}}; void pisca_diagonal_principal() // função para controlar os leds da diagonal principal { digitalWrite(matriz_leds[0][0], HIGH); digitalWrite(matriz_leds[1][1], HIGH); delay(1000); digitalWrite(matriz_leds[0][0], LOW); digitalWrite(matriz_leds[1][1], LOW); delay(1000); } void pisca_diagonal_secundaria() // função para controlar os leds da diagonal secundária { digitalWrite(matriz_leds[0][1], HIGH); digitalWrite(matriz_leds[1][0], HIGH); delay(1000); digitalWrite(matriz_leds[0][1], LOW); digitalWrite(matriz_leds[1][0], LOW); delay(1000); }
- 87. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Modularizando um Programa – funções ◦ Exemplo: programa para acionar 4 (quatro) leds usando funções (dispostos em matriz) UFSC - Oficina de Robótica - @2013 87 void setup() { int i, j; for (i = 0; i < 2; i++) { for (j = 0; j < 2; j++) { // Inicializa portas pinMode(matriz_leds[i][j], OUTPUT); } } } void loop() { pisca_diagonal_principal(); pisca_diagonal_secundaria(); }
- 88. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) ◦ O Arduino UNO possui 6 (seis) portas PWM, 3, 5, 6, 9, 10 e 11. ◦ O sinal PWM pode variar de 0 a 255 e para ativá-lo basta usar a seguinte instrução em uma das portas PWM: analogWrite(pin, sinal_pwm); ◦ Note que as portas PWM são todas digitais, porém o sinal é modulado “como se fosse” um sinal analógico. UFSC - Oficina de Robótica - @2013 88
- 89. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) ◦ Ciclo de Trabalho – Duty-Cicle O sinal PWM possui um ciclo de trabalho que determina com que frequência o sinal muda do nível lógico HIGH para o nível lógico LOW e vice versa. No Arduino a frequência do PWM pode ser definida entre 32Hz até 62kHz. UFSC - Oficina de Robótica - @2013 89
- 90. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) ◦ Ciclo de Trabalho – Duty-Cicle Duty cicle = (100% * largura do pulso) / período UFSC - Oficina de Robótica - @2013 90 Período Pulso
- 91. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) ◦ Exemplo PWM – extraído de Teach Yourself PIC Microconrollers for Absolute Beginners – M. Amer Iqbal Qureshi, 2006. UFSC - Oficina de Robótica - @2013 91
- 92. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) UFSC - Oficina de Robótica - @2013 92 Frequência Tempo por troca de ciclo Pinos 30Hz 32 milissegundos 9 e10, 11e 3 61Hz 16 milissegundos 5 e 6 122Hz 8 milissegundos 9 e10, 11e 3 244Hz 4 milissegundos 5 e 6, 11e 3 488Hz 2 milissegundos 9 e10, 11e 3 976Hz (1kHz) 1 milissegundos 5 e 6, 11e 3 3.906Hz (4kHz) 256 microssegundos 9 e10, 11e 3 7.812Hz (8kHz) 128 microssegundos 5 e 6 31.250Hz (32kHz) 32 microssegundos 9 e10, 11e 3 62.500Hz (62kHz) 16 microssegundos 5 e 6
- 93. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Sinal PWM – Pulse Width Modulation (Modulação por Largura de Pulso) ◦ Exemplo: mudando a intensidade de um led de alto brilho com sinal PWM UFSC - Oficina de Robótica - @2013 93 const int led_alto_brilho = 3; void setup() { pinMode(led_alto_brilho, OUTPUT); Serial.begin(9600); } void loop() { int i; for (i = 10; i <= 255; i+=10) { analogWrite(led_alto_brilho, i); // Aumenta a intensidade do brilho Serial.println(i); delay(300); } for (i = 255; i >= 5; i-=10) { analogWrite(led_alto_brilho, i); // Diminui a intensidade do brilho Serial.println(i); delay(300); } delay(3000); }
- 94. Laboratório de Automação e Robótica Móvel Financiamento: Execução: É possível agregar novas funcionalidades a uma placa do Arduino. As extensões das placas do Arduino são chamadas de shields. Existem shields para as mais diversas funcionalidades, por exemplo: ◦ Comunicação ethernet ◦ Comunicação wifi ◦ Comunicação bluethooth ◦ Ponte H ◦ Banco de relês ◦ ... UFSC - Oficina de Robótica - @2013 94
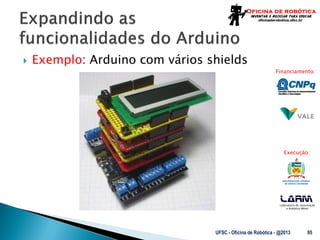
- 95. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplo: Arduino com vários shields UFSC - Oficina de Robótica - @2013 95
- 96. Laboratório de Automação e Robótica Móvel Financiamento: Execução: Exemplos de shields UFSC - Oficina de Robótica - @2013 96