Solution of problems in instrumentation and engineering control in arabic language
1 like1,160 views

يتناول الكتاب "مسائل وحلول في قياس وتحكم أجهزة" لمؤلفه محمد أسامة سليمان المرضي موضوعات أساسية في القياسات وأنظمة التحكم الميكانيكية والالكترونية. يقدم محتويات مفيدة للطلاب في تخصصات الهندسة الميكانيكية ويشرح مبادئ التحكم وآليات القياس بأنواعها المختلفة. يسعى الكتاب إلى إثراء المعرفة الأكاديمية بطرق جديدة ومبسطة لفهم الأنظمة المعقدة.







![2.6بَّﻛرُماﻟ رُﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ إضاﻓيﺔ مﺳائل
التحق :الثالث الﻔصلص ....كمُّحالت مُظُن استقرار من ق136
3.1اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط رﺳم
3.1.1مرﺗدة ﺗغذيﺔ وﺣدة ذات مغﻠﻘﺔ مﻧظومﺔ
3.1.2اﻹﻧﺗﻘال ﻟداﻟﺔ اﻟﻌام اﻟﺷﻛل
3.1.3ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل ﻟرﺳم اﻟﻌامﺔ األﺣﻛام
3.2مﺣﻠوﻟﺔ أمﺛﻠﺔ
3.3راوث أﺳﻠوباﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق
3.4][أ مﺣﻠوﻟﺔ أمﺛﻠﺔ
3.5راوث ألﺳﻠوب اﻟﻌامﺔ األﺣﻛام ﺑﻌض
3.6][ب مﺣﻠوﻟﺔ أمﺛﻠﺔ
3.7إضاﻓيﺔ مﺳائل
ص ....والمراجﻊ الكتب153](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-8-320.jpg)















![( رقم شكل1.22)
𝑨𝒏𝒔. {
𝜽 𝒐
𝜽𝒊
=
𝟏. 𝟓
𝟏 + 𝟎. 𝟖𝑫
, 𝝉 = 𝟎. 𝟖𝒔}
اﻟمﺑيﻧﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال ﻋامل أوﺟد( رﻗم اﻟﺷﻛل ﻓﻲ1.23ادﻧاه ):
( رقم شكل1.23)
𝑨𝒏𝒔. { 𝒔 𝟏(𝑪𝑫 + 𝒔 𝟐)/ [ 𝑪𝑫 ( 𝒔 𝟏 + 𝒔 𝟐) + 𝒔 𝟏 𝒔 𝟐]}](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-24-320.jpg)
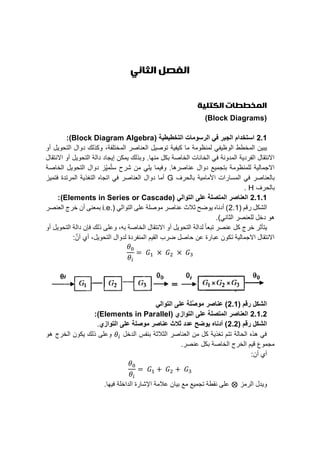
![( رقم الشكل2.2التوازي علﻰ موصلة عناصر )
2.1.3( الوحدة ذات المرتدة التغذية منظومة(Unity Feedback System:
( رقم الشكل2.3وحدة ذات خلﻔية تغذية منظومة يوضح أدناه ).
ﺑاﻹﺷـارة اﻟمﻧظومـﺔ مدﺧل ﺗغذيــﺔ يﺗم اﻟﺣاﻟﺔ ھذه ﻓﻲiθاﻟفرق يﻛون وﺑذﻟكoθ-iθيميز واﻟذي
ﺑاﻟرمزeθ.ﺑاﻟﻌﻧﺻر ﻓﻘط يﺗأﺛر اﻟذي ھو
َّفإن وهكذا:
𝜃 𝑜 = 𝐺𝜃 𝑒 = 𝐺(𝜃𝑖 − 𝜃 𝑜)
𝜃 𝑜 = 𝐺𝜃𝑖 − 𝐺𝜃 𝑜
𝜃 𝑜 + 𝐺𝜃𝑖 = 𝐺𝜃𝑖
𝜃 𝑜[1 + 𝐺] = 𝐺𝜃𝑖
االنتقال أو التحويل دالة:
𝜃0
𝜃𝑖
=
𝐺
1 + 𝐺
( رقم الشكل2.3وحدة ذات خلﻔية تغذية منظومة )
2.1.4( عنصر يعترضها التي المرتدة التغذية منظومةFeed-back loop with
element):
( رﻗم اﻟﺷﻛل2.4اﻟﺧﻠفﻲ اﻟمﺳار ﻓﻲ ﻋﻧﺻر يﻌﺗرضﮭا مﻧظومﺔ يوضح أدﻧاه ).
اﻹﺷارة ﺗﻌديل يﺗم اﻟﺣاﻟﺔ ھذه ﻓﻲ0θاﻟﻌﻧﺻر ﺑواﺳطﺔ اﻟمرﺗدة اﻟﺗغذيﺔ اﺗﺟاه ﻓﻲ مﺳارھا ﻓﻲ وھﻲ
Hاﻹﺷارة ﻻﻋطاء0θHاﻟﺗﺟميﻊ ﻧﻘطﺔ ﻋﻧد.اﻟﺧطأ إﺷارة ﺗﻛون وﺑذﻟكeθاﻟﻌﻧﺻر ﺑﮭا يغذي اﻟﺗﻲ
ھﻲ األمامﻲ اﻟمﺳار ﻓﻲ اﻟموﺟود(𝜃𝑖 − 𝐻𝜃 𝑜).
فإن ذلك وعلﻰ:
𝜃 𝑜 = 𝐺𝜃 𝑒 = 𝐺(𝜃𝑖 − 𝐻𝜃 𝑜)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-26-320.jpg)
![𝜃 𝑜 = 𝐺𝜃𝑖 − 𝐺𝐻𝜃 𝑜
𝜃 𝑜 + 𝐺𝐻𝜃𝑖 = 𝐺𝜃𝑖
𝜃 𝑜[1 + 𝐺𝐻] = 𝐺𝜃𝑖
أن نجد ومنها:
𝑇. 𝑜 =
𝜃0
𝜃𝑖
=
𝐺
1 + 𝐺𝐻
( رقم الشكل2.4الخلﻔي المسار في عنصر يعترضها منظومة )
2.2( محلولة أمثلةSolved examples):
1( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال او اﻟﺗﺣويل ﻋامل أوﺟد .2.5:أدﻧاه )
رقم الشكل(2.5)
الحل:
اﻟﻌﻧﺻر من اﻟﺧرج𝐺1 𝜃𝑖 = 𝐺1.
اﻟﻌﻧﺻر من اﻟﺧرج𝐺4 𝜃𝑖 = 𝐺4.
اﻟﻌﻧاﺻرG2و𝐺3اﻟﺗواﻟﻲ ﻋﻠﻰ مﺗﺻﻠﺔ ﻋﻧاﺻر ھﻲ.ﻛﺗﻠﺔ ﻓﻲ وﺗوﺣيدھا ضرﺑﮭا يمﻛن ﺑاﻟﺗاﻟﻲ
واﺣدة.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-27-320.jpg)





















































![الثاني القسم
مقدمة
ھذا يﮭدفاﻟﻛﺗاب من اﻟﻘﺳمأو اﻟﺗﺣﻛم وأﻧظمﺔ ،اﻟﮭﻧدﺳيﺔ اﻟﻘياس أﺟﮭزة ﻋﻠﻰ اﻟﺗﻌرف أھميﺔ ﻟﺗأﻛيد
اﻟﺳيارات مُﻛَّﺣﺗ ﻟوﺣات ﻓﻲ اﻟموﺟودة اﻟﺳيطرة،.واﻟمﺻاﻧﻊ اﻟماﻛيﻧات
ويﺣﺗويھذاﻋﻠﻰ اﻟﻘﺳمﻓﺻول ﺛالﺛﺔ،من اﻟذاﺗﻲ اﻟﺗﺣﻛم ألﻧظمﺔ مدﺧل ﻋﻠﻰ األول اﻟفﺻل يﺷﺗمل
أﻧواﻋﮭا ﺣيث،ﻛﺗﻠيﺔ مﺧططات ﺷﻛل ﻓﻲ ﺗمﺛيﻠﮭا،اﺳﺗﺟاﺑﺔ ﻋﻠﻰ ﻓيﺷﺗمل اﻟﺛاﻧﻲ اﻟفﺻل أما .ﻋﻧاﺻرھا
اﻧﺣدار ﺑدوال بَّﻛرُم أو أﺳﻲ رُﺧﺗأ ﻛوﻧﮭا ﺣيث من اﻟﻌﻧاﺻر،ﺧطوة،دﻓﻊ،.ﺟيﺑيﺔ أو ﺗواﻓﻘيﺔ وداﻟﺔ
واﻟمرﻛب األﺳﻲ اﻟﺗأﺧر ﻟﻌﻧاﺻر اﻟمﺣﻠوﻟﺔ واألمﺛﻠﺔ اﻟمﺳائل من اﻟﻌديد ًاأيض اﻟﺛاﻧﻲ اﻟفﺻل يﺗضمن.
أﺳﻠوب مﺛل اﻟﺗﺣﻛم ﻧظم اﺳﺗﻘرار من اﻟﺗﺣﻘق ﻓﻲ اﻟمﺳﺗﺧدمﺔ اﻟﺗﻘﻧيات ﺑﻌض اﻟﺛاﻟث اﻟفﺻل يﺳﺗﻌرض
( اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل رﺳمPlotting root locus 𝑖. 𝑒.راوث وأﺳﻠوب )
( ﻟالﺳﺗﻘرارRouth stability criterion 𝑖. 𝑒.).اﻟمﺳائل من اﻟﻌديد ھﻧاﻟك اﻟفﺻل ھذا ﻧﮭايﺔ وﻓﻲ
و.اﻟمﺣﻠوﻟﺔ األمﺛﻠﺔ
اﻻﺳﺗﻘرار ﺗﻘييم من اﻟطالب ﻟﺗمﻛين اﻟﻛالﺳيﻛيﺔ اﻟﺗﺣﻛم ﻧظريﺔ ﻟﺗغطيﺔ اﻟﻛﺗاب ھذا ُفديﮭ،اﻟدﻗﺔ
اﻟﺗﺣﻛم ﻟﻧظم اﻟﻌمﻠيﺔ ﻟﻠﺗﻘﻧيﺔ ﺧاﺻﺔ ﺑمرﺟﻌيﺔ ﻟﻠﻧظام اﻻﺳﺗﺟاﺑﺔ وﺳرﻋﺔ.
:ﻋﻠﻰ ًاﻗادر اﻟطاﻟب ﺟﻌل ھﻲ األﺳاﺳيﺔ اﻟﻛﺗاب ھذا أھداف من
1ﻗيا ﻟﻧظام رياضﻲ ﻧموذج ﺻياﻏﺔ ]ﺗﺣﻛم أو س(𝑖. 𝑒.ميﻛاﻧيﻛيﺔ أﻧظمﺔ،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ،
ﺛيرموديﻧاميﻛيﺔ،)وﻛﮭرﺑائيﺔ.
2اﻟﺣﻠﻘﺔ مغﻠﻘﺔ أو مفﺗوﺣﺔ ﻟﻧظم اﻟﻛﺗﻠيﺔ اﻟمﺧططات ﺗمﺛيل ]،ﺻﻠﺔ َّمو ﻟﻌﻧاﺻر اﻹﻧﺗﻘال دوال وإيﺟاد
ھﺟين ﻋﻧاﺻر أو اﻟﺗوازي أو اﻟﺗواﻟﻲ ﻋﻠﻰ.
3اﻻﻧﺣدار ﻟدوال اﻟزمﻧيﺔ اﻻﺳﺗﺟاﺑﺔ إيﺟاد ]،اﻟﺧطوة،اﻟدﻓﻊ،ﻟﻧظم اﻟﺟيﺑيﺔ أو اﻟﺗواﻓﻘيﺔ واﻟدوال
.ومرﻛب أﺳﻲ ﺗأﺧر
4( اﻟﺗردديﺔ اﺳﺗﺟاﺑﺗه من ﻟﻧظام اﻻﺳﺗﻘرار ﺷرط ﺗﺣديد ]𝑖. 𝑒.ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل رﺳم أﺳﻠوب
.)اﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق راوث وأﺳﻠوب اﻟﺧاﺻيﺔ مﻌادﻟﺔ
5أد ﻟﺗﺣﺳين ﻟﻠﺧطأ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﺗﻌويض ].اﻟﺗﺣﻛم ﻧظام اء
6ﻋاﻟي اﻟﺗﻘﻧيات ﺗطﺑيق ]ﺔاﻟوضﻊ ﻓﻲ اﻟﺗﺣﻛم ﻟذﻟك ﻛمﺛال ﻋمﻠﻲ ﻟﻧظام،اﻟضغط،اﻟﺣرارة درﺟﺔ،
.اﻟﺳوائل مﻧاﺳيب ﻓﻲ واﻟﺗﺣﻛم اﻟموائﻊ ﺳريان
7ديﻧاميﻛيﺔ اﺳﺗﺟاﺑﺔ ذات ﻟمﺳائل اﻟﺗﺣﻛم وﻧظريﺔ اﻟميﻛاﻧيﻛا مﺑادئ ﺗطﺑيق ]،واﻟﺗﺣﻛم اﻻﺳﺗﻘرار
ﻟﻠمرﻛﺑات اﻟﺣرﻛﺔ ﻓﻲ.اﺧ يﺗماﻟمرﻛﺑات واﺳﺗﻘرار اﻟديﻧاميﻛا مﺛل مواضيﻊ من اﻟﺗطﺑيﻘات ﺗيار
واﻟطائرات.
اﻟموﻓق وهللا.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-81-320.jpg)





![∴ 𝑅𝑒 𝑠𝑡
+ 𝜏𝑆𝑅𝑒 𝑠𝑡
= 0
𝑅𝑒 𝑠𝑡(1 + 𝜏𝑆) = 0
∴ τ𝑆 = −1 ∴ 𝑆 = −
1
𝜏
∴ C. F, 𝜃 𝑜 = 𝑅𝑒
−𝑡
𝜏⁄
:الكامل الحل
𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹
𝜃 𝑜 = 𝑘( 𝑡 − 𝜏) + 𝑅𝑒
−𝑡
𝜏⁄
اﻟﺣدوديﺔ اﻟﺷروط(Boundary Conditions):
ﻋﻧد𝑡 = 𝑜،و𝜃 𝑜 = 0
0 = 𝑘(0 − 𝜏) + 𝑅
0 = −𝑘𝜏 + 𝑅
∴ 𝑅 = 𝑘𝜏
𝜃 𝑜 = 𝑘( 𝑡 − 𝜏) + 𝑘𝜏𝑒
−𝑡
𝜏⁄
∴ 𝜃 𝑜 = 𝑘𝑡 − 𝑘𝜏 + 𝑘𝜏𝑒
−𝑡
𝜏⁄
= k [𝑡 − 𝜏 + 𝜏𝑒
−𝑡
𝜏⁄
]
= k [𝑡 − 𝜏 (1 − 𝑒
−𝑡
𝜏⁄
)]
𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃 𝑜 = 𝑘𝑡 − 𝑘( 𝑡 − 𝜏) = 𝑘𝑡 − 𝑘𝑡 + 𝑘𝜏 = 𝑘𝜏،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ
مﺛال(1):
اﻟذاﺗﻲ ﻗﺻوره ﻋزم ًادوار ًاﻋضو يﺣمل إدارة ﻋمود5𝑘𝑔𝑚2
مﻌامل يﻌطﻲ اھﺗزاز ومﺧمد
مﻘداره ﻟزج مضاءﻟﺔ2𝑁. 𝑚𝑠/𝑟𝑎𝑑ﻟﻠﻌالﻗﺔ ًاﺗﺑﻌ ﺑإﻧﺗظام يزداد ﻋزم ﺗﺳﻠيط ﺗم إذا𝑇 = 1.2𝑡𝑁. 𝑚
اﻟدوار اﻟﻌضو ﻋﻠﻰ،ﺑﻌد إﻟيﮭا اﻟوﺻول يمﻛن اﻟﺗﻲ اﻟﺳرﻋﺔ ھﻲ وما ،اﻟزمن ﺛاﺑت ﺣدد3𝑠.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-87-320.jpg)
![اﻟﺣل:
التعجيل عزم5Dω N. m = I
𝑑𝜔
𝑑𝑡
= 𝐼𝛼 =
المضاءلة عزم2𝜔 𝑁. 𝑚 = 𝐶𝜔 =
المسلط العزم
𝑇 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 = (5𝐷𝜔 + 2𝜔) 𝑁. 𝑚
𝑇 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 = (5𝐷 + 2) 𝜔
∴
𝑇
𝜔
= 5𝐷 + 2
∴
𝜔
𝑇
=
1
2 + 5𝐷
=
0.5
1 + 2.5𝐷
الزمن ثابت فإن وهكذا( 𝛕)والكسبk:
τ = 2.5𝑆
𝑘 = 0.5
اﻧﺣدار ﻟداﻟﺔ اﻟدوار اﻟﻌضو يﻌرض ﻋﻧدما𝑇 = 1.2𝑡 𝑁. 𝑚
ﻓإن:
ω = 1.2𝑡 ×
0.5
1 + 2.5𝐷
𝜃 𝑜 = 𝑘 [𝑡 − 𝜏 (1 − 𝑒
−𝑡
𝜏⁄
)]
𝜃𝑖 = 𝑘𝑡
𝐷𝜃𝑖 = 𝜛𝑖 = 𝑘](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-88-320.jpg)
![ω = اﻹضاﻓﻲ اﻟمﻧظومﺔ ﻛﺳب × ﻛﺳب اﻟمﻧظومﺔ × [𝑡 − 𝜏(1 − 𝑒 −𝑡
𝜏⁄ )]
ω = 1.2 × 0.5 [𝑡 − 2.5 (1 − 𝑒
−𝑡
2.5⁄
)]
ﻋﻧد𝑡 = 3𝑠
𝜔 = 0.6 [3 − 2.5 (1 − 𝑒
−3
2.5⁄
)] = 0.752 𝑟𝑎𝑑/𝑠
2.1.2اﻟﺧطوة داﻟﺔ(Step Function):
اﻟﺧطوة ﻟداﻟﺔ األوﻟيﺔ اﻟﺷروط:
𝜃𝑖 = 0, at t < 0
𝜃𝑖 = 𝑘 , 𝑎𝑡 𝑡 ≥ 0
𝑇. 0 = 𝐺 =
𝜃 𝑜
𝜃𝑖
=
1
1 + 𝜏𝐷
(1 + 𝜏𝐷) 𝜃 𝑜 = 𝜃𝑖
𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝜃𝑖
" اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔSteady State( "P.I)
𝜃 𝑜 = 𝑘
" اﻟمﺳﺗﻘرة ﻏير اﻟﺣاﻟﺔTransient State( "C.F)
𝜃 𝑜 = 𝑅𝑒 𝑠𝑡
𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡
𝑅𝑒 𝑠𝑡
+ 𝜏𝐷𝑅𝑒 𝑠𝑡
= 0
𝑅𝑒 𝑠𝑡(1 + 𝜏𝑠) = 0
τs = −1 ، ∴ s = −
1
𝜏
∴ 𝜃 𝑜 = 𝑅𝑒
−𝑡
𝜏⁄
اﻟﻛامل اﻟﺣل:
𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹
𝜃 𝑜 = 𝑘 + 𝑅𝑒
−𝑡
𝜏⁄
اﻟﺣدوديﺔ اﻟﺷروط"B. Conditions":
ﻋﻧد𝜃 𝑜 = 0 , 𝑡 = 0
0 = 𝑘 + 𝑅 ∴ 𝑅 = −𝑘](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-89-320.jpg)


![𝐿𝑛𝑒
−𝑡
4.37⁄
= 𝐿𝑛0.04
−𝑡
4.37
𝐿𝑛 = 𝐿𝑛 0.04
∴ 𝑡 =
𝐿𝑛0.04
𝐿𝑛𝑒
× −4.37 = −3.22 × −4.37 = 14.1𝑠
2.1.3اﻟدﻓﻊ داﻟﺔ(Impulse Function):
اﻻﻧﺣدار ﻟداﻟﺔ اﻟﺛاﻧيﺔ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ أو اﻟﺧطوة ﻟداﻟﺔ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﻋن ﻋﺑارة وھﻲ.
:الدفﻊ لدالة اﻷولية الشروط
∆𝑡 → 0
𝑘 → ∞
𝜃𝑖 = 0
اﻻﻧﺗﻘال ﻋامل 𝑇. 0 =
1
1 + 𝜏𝐷
𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝜃𝑖 → (∗)
اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ"Steady State"(P.I):
𝜃 𝑜 = 0
مﺳﺗﻘرة اﻟال اﻟﺣاﻟﺔ"Transient State"(C.F:)
𝜃 𝑜 = 𝑅𝑒 𝑠𝑡
𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡
المعادلة في عاليه القيم بتعويض(∗):
𝑅𝑒 𝑠𝑡
+ 𝜏𝑠𝑅𝑒 𝑠𝑡
𝑅𝑒 𝑠𝑡[1 + 𝜏𝑠] = 0
∴ 𝜏s = −1
∴ 𝑠 = −
1
𝜏
∴ 𝜃 𝑜 = 𝑅𝑒
−𝑡
𝜏⁄](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-92-320.jpg)




![َّأن ﺑماθ = ω𝑡،
∴ ω =
θ
t
=
2π
25
= 0.2513 𝑟𝑎𝑑/𝑠
τ = 6𝑠
∴ 3.9 =
𝑎
√1 + (0.2513 × 6)2
∴ 𝑎 = 7.06℃
الحرارة درجة متوسط:
Tm =
37.6 + 45.4
2
= 41.5℃
∴الحرارة لدرجة اﻷقصﻰ الحد:
Tm𝑎𝑥 = 41.5 + 7.06 = 48.56℃
الحرارة لدرجة اﻷدنﻰ الحد:
T 𝑚𝑖𝑛 = 41.5 − 7.06 = 34.44℃
2.2األﺳﻲ رُّاﻟﺗأﺧ ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ إضاﻓيﺔ أمﺛﻠﺔ:
1اﻟﺷﻛل يﺑين ]ﻓيه اﻟداﺧﻠﺔ اﻟمياه ﻛميﺔ ًاﺻﮭريﺟ أدﻧاه𝒬iمﻧه واﻟﺧارﺟﺔ𝒬oﻓﻲ اﻟﺗﺣﻛم يﺗم
ﻟوﻟب ﺑواﺳطﺔ وضﻌﮭا ﺗﻌديل يمﻛن ﻋوامﺔ ﺑاﺳﺗﺧدام وضﻌه يضﺑط ﺻمام ﺑواﺳطﺔ اﻟمياه مﻧﺳوب.
اﻟﺻﮭريج إﻟﻰ اﻟمياه ﺗدﻓق يﺗﻧاﺳباﻟﺻﮭريج ﺧارج إﻟﻰ اﻟمياه ﺗدﻓق اﻋﺗﺑار ويمﻛن اﻟﻌوامﺔ ﺣرﻛﺔ مﻊ
ﺑه اﻟموﺟودة اﻟمياه مﻧﺳوب مﻊ ًامﺗﻧاﺳﺑ،ًاﺻغير اﻟمﻧﺳوب ﻓﻲ اﻟﺗغير يﻛون ﻋﻧدما وذﻟك.
اﻟمياه ﻟمﻧﺳوب اﻟفﻌﻠﻲ اﻟﻌﻠو ﺑين اﻟﻌالﻗﺔ اﺳﺗﻧﺑط،اﻟمطﻠوب اﻟﻌﻠو وﺑيناﻟﻠوﻟب ضﺑط ﺗغيير ﻋﻧد.
:اﻟﺣل
اﻟفﻌﻠﻲ اﻟﻌﻠو أن ﻧفرضھو اﻟمياه ﻟمﻧﺳوبℎo
ھو اﻟمطﻠوب اﻟﻌﻠو َّوأنℎi
ھو اﻟمﻧﺳوب ﻓﻲ اﻟﺗغير يﻛون ﻋﻠيهhi − ℎo
َّﻓإن اﻟﻌوامﺔ ﺣرﻛﺔ مﻊ ﺗﺗﻧاﺳب اﻟﺻﮭريج إﻟﻰ اﻟداﺧﻠﺔ اﻟمياه ﻛميﺔ أن ﺑما:](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-97-320.jpg)
![𝒬iα(hi − ho)
∴ 𝒬i = C1(ℎ𝑖 − ho)
ﺣيث𝐶1ﺛاﺑت مﻘدار
ﻛميﺔ أن ﻛماﻓيه اﻟمياه مﻧﺳوب ﻋﻠو مﻊ ﺗﺗﻧاﺳب اﻟﺻﮭريج من اﻟﺧارﺟﺔ اﻟمياه،َّأن أي:
𝒬oαℎo
∴ 𝒬o = C2ℎo
ﺣيث𝑐2ﺛاﺑت مﻘدار
اﻟﺳريان اﺳﺗمراريﺔ مﻌادﻟﺔ من،
𝒬i − 𝒬o = 𝐴𝑣 = 𝐴
𝑑ℎ 𝑜
𝑑𝑡
= 𝐴𝐷ℎ 𝑜
ﺣيث𝐴اﻟﺻﮭريج مﻘطﻊ مﺳاﺣﺔ =
∴ 𝑐1(ℎ𝑖 − ℎ 𝑜) − 𝑐2ℎ 𝑜 = 𝐴𝐷ℎ 𝑜
c1hi − c1ho − c2ho = 𝐴𝐷ℎ 𝑜
c1hi = c1ho + c2ho + 𝐴𝐷ℎ 𝑜
c1hi = ho{ 𝐶1 + C2 + AD}
h0
hi
=
𝑐1
c1+c2+AD
2ﺗردديﺔ ﺣﻠﻘﺔ ذو ﺑﺻمام ﻓيه اﻟﺗﺣﻛم يﺗم ًاھايدروﻟيﻛي ًاﻛﺑاﺳ أدﻧاه اﻟﺷﻛل يوضح ]،يﻛون ﻋﻧدما
اﻻﺳطواﻧﺔ ﻧﮭايﺗﻲ ﻋﻧد اﻟﺳريان يﻘف األوﺳط وضﻌه ﻓﻲ امَّماﻟﺻ.َّاسﺑاﻟﻛ مﻘطﻊ مﺳاﺣﺔ0.003𝑚2
ھو اﻻﺳطواﻧﺔ داﺧل إﻟﻰ اﻟزيت ﺳريان مﻌدل ﻓإن األوﺳط وضﻌه من اﻟﺻمام يﺗﺣرك وﻋﻧدما
0.01𝑚3
/𝑠.اﻟﺻمام يﺗﺣرﻛه مﺗر ﻟﻛل
اﻟﺻورة ﻋﻠﻰ ﺗﻛون اﻻﻧﺗﻘال داﻟﺔ أن ح ِّوض ]أ𝑘/(1 + 𝜏𝐷)،ﺛم اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضات ذﻛر مﻊ
من ﻛل ﻗيمﺔ أوﺟد𝑘, 𝜏.
ﻓﺟأة اﻟذراع ﻧﮭايﺔ ﺗﺣرﻛت إذا ]ب20𝑚𝑚األوﺳط اﻟوضﻊ من،أو اﻟﺣديﺔ اﻻزاﺣﺔ ﻓأوﺟد
اﻟﻧﮭائيﺔ،ﺗﻌادل ﻟﺣرﻛﺔ اﻟالزم اﻟزمن وﻛذﻟك85.اﻻزاﺣﺔ ھذه من %
،التحويل عاملاالنتقال أو](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-98-320.jpg)
![أن ﻧفرض ]أ𝒬اﻟفﺗﺣات من اﻟﺳائل ﺳريان مﻌدل ھو،وأن𝑥مﺣﺻﻠﺔ ھﻲاﻟﺻمام إزاﺣﺔ
∴ 𝒬 = 0.01𝑥𝑚3
/𝑠
𝑥 = 𝑒+
− 𝑒−
،اﻟﺻمام إزاﺣﺔ مﺣﺻﻠﺔ
:اﻟمﺛﻠﺛات ﺑﺗﺷاﺑه
e+
xi
=
80
120
∴ e+
=
80
120
𝑥i
اﻟﺷﻲء ﻧفسe−
=
40
120
𝑥0
∴ 𝑥 =
80
120
𝑥𝑖 −
40
120
𝑥 𝑜
=
40
120
(2xi − xo) =
1
3
(2𝑥𝑖 − 𝑥 𝑜)
∴ 𝒬 =
0.01
3
(2xi − xo) → (1)
اﻟﺳريان اﺳﺗمراريﺔ مﻌادﻟﺔ ﺑاﺳﺗﺧدام،
𝒬 = 𝐴𝑣 = 𝐴
𝑑𝑥0
𝑑𝑡
= 𝐴𝐷𝑥 𝑜 = 0.003𝐷𝑥 𝑜 → (2)
المعادلتين بمساواة( 𝟐)و ( 𝟏):
0.01
3
(2xi − xo) = 0.003𝐷𝑥 𝑜
0.02
3
xi −
0.01
3
xo = 0.003𝐷𝑥 𝑜
0.02
3
xi = (
0.01
3
+ 0.003D) 𝑥0
∴ 𝑇. 0 =
𝑋0
𝑋𝑖
=
0.02
3
0.01
3
+ 0.003𝐷
والمقام البسط بقسمة
𝟎.𝟎𝟏
𝟑
÷:
𝑥0
xi
=
2
1 + 0.9D
اﻟﺻورة ﺑﻧفس اﻟﻌالﻗﺔ وھذه
K
1+𝜏𝐷
ﺣيث:𝐾 = 2،اﻟزمن وﺛاﺑت𝜏 = 0.9S
اﻟذاﺗﻲ اﻟﻘﺻور إھمال ھﻲ اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضياتاﻟمﺗﺣرﻛﺔ ﻟألﺟزاء،ﺗﺳرب إھمال وﻛذﻟك
.اﻟزيت واﻧضغاطيﺔ
ﻋﻧد ]بxi = 20𝑚𝑚](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-99-320.jpg)
![𝑥0
xi
=
k
1 + τD
x0 =
𝐾𝑥𝑖
1 + τD
=
2 × 20
1 + 0.9D
اﻟﻌامﺔ ﻟﻠﺻيغﺔ ﺑاﻟرﺟوعاﻟﺧطوة ﻟداﻟﺔ:
x0 = 𝑘𝑥𝑖 (1 − 𝑒
−𝑡
𝜏⁄
)
∴ 𝑥0 = 40 (1 − 𝑒
−𝑡
0.9⁄
)
ﺑاﻟﺻفر ومﺳاواﺗﮭا اﻟﺧطوة داﻟﺔ ﺗفاضل يﺟب اﻟﻧﮭائيﺔ أو اﻟﺣديﺔ اﻹزاﺣﺔ ﻹيﺟاد،
d𝑥0
dt
= 0 − (
−1
0.9
× 𝑒
−𝑡
0.9⁄
) = 0
=
40
0.9
𝑒
−t
0.9⁄
= 0
𝑒
−t
0.9⁄
= 0
∴ 𝑡 = ∞
∴ x0 = 40(1 − e−∞) = 40(1 − 0) = 40𝑚𝑚
ھﻲ اﻟﺣديﺔ اﻹزاﺣﺔ𝑡 = ∞ ﻋﻧد 40 𝑚𝑚.
ﻋﻧدx0 = 0.85 × 40𝑚𝑚،
40 (1 − e
−t
0.9⁄
) = 40 × 0.85
1 − e
−t
0.9⁄
= 0.85
e
−t
0.9⁄
= 0.15
𝐿𝑛 𝑒
−𝑡
0.9⁄
= 𝐿𝑛0.15
−t
0.9
𝐿𝑛𝑒 = 𝐿𝑛0.15
∴ 𝑡 =
𝐿𝑛0.15
𝐿𝑛𝑒
× −0.9 =
−1.89712
1
× −0.9 = 1.71 𝑠
3يوضح ]اﻟمضغوط ﺑاﻟﮭواء ﺗﻌمل مؤازرة آﻟيﺔ أدﻧاه اﻟﺷﻛل،اﻟﮭواء ﺳريان ﻓﻲ اﻟﺗﺣﻛم يﺗم ﺣيث
( ﻗالﺑﻲ ﺻمام ﺑواﺳطﺔ األﺳطواﻧﺔ داﺧل إﻟﻰFlapper valveذراع يﺣرﻛه ).اﻟﺻمام ﺣرﻛﺔ،𝑦
اﻟوﺻﻠﺔ ﺣرﻛﺔ ﻧﺻف ﺗﺳاوي𝑥،ﺗﻌادل اﻟمﻛﺑس ومﺳاﺣﺔ. 1600 𝑚𝑚2
ايﺟاد يمﻛنﺳريان مﻌدل
اﻟﻌالﻗﺔ من األﺳطواﻧﺔ داﺧل إﻟﻰ اﻟﮭواء𝑄 = 0.01𝑦 𝑚3
/𝑠،ﺣيث𝑦ﺑاﻟمﺗر.
اآلﻟيﺔ ﻟﻠﺗرﻛيﺑﺔ اﻻﻧﺗﻘال داﻟﺔ اﺳﺗﻧﺑط ]أ،ﺛاﺑت إيﺟاد مﻊاﻟزمن،ﻋمود مﻘطﻊ مﺳاﺣﺔ ﺑإھمال وذﻟك
.اﻟمﻛﺑس
ﺟيﺑيﺔ اﻟدﺧل إﺷارة ﻛاﻧت إذا ]ب،ﺑاﻟﻌالﻗﺔ ﻋﻧﮭا رُِّﻌﺑيو𝜃𝑖 = 30 𝑠𝑖𝑛 2𝑡 𝑚𝑚طﺔَّﻠمﺳ وھﻲ
اﻟذراع ﻋﻠﻰ،.ﻟﻠمﻛﺑس اﻟمﺳﺗﻘرة اﻟﺣرﻛﺔ ﻹيﺟاد اﺳﺗﺧدامﮭا يمﻛن اﻟﺗﻲ اﻟﻌالﻗﺔ ﻓاﺳﺗﻧﺑط](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-100-320.jpg)
![:اﻟﺣل
:ﻟﻠوﺻﻠﺔ اﻟﮭﻧدﺳﻲ اﻟﺷﻛل من ][أ
اﻟوﺻﻠﺔ إزاﺣﺔ مﺣﺻﻠﺔ ، 𝑥 =
60
100
× 𝜃𝑖 −
40
100
× 𝜃 𝑜 =
3𝜃 𝑖−2𝜃 𝑜
5
𝑚
∴ 𝑦 =
𝑥
2
=
3𝜃𝑖 − 2𝜃0
10
𝑚
∴ 𝒬 = 0.01 (
3𝜃𝑖 − 2𝜃 𝑜
10
) 𝑚3
/𝑠 → (1)
السريان استمرارية معالة باستخدام،
𝓠 = 𝐀𝐯 = 𝐀
𝐝𝛉 𝐨
𝐝𝐭
= 𝟏𝟔𝟎𝟎 × 𝟏𝟎−𝟔
𝐝𝛉 𝐨
𝐝𝐭
→ ( 𝟐)
( المعادلتين بمساواة1( و )2علﻰ نحصل ):
0.01 (
3𝜃𝑖 − 2𝜃 𝑜
10
) = 0.0016𝐷𝜃 𝑜
3θi − 2θo = 1.6𝐷𝜃 𝑜أو
مﻧﮭا اﻟﺗﻲ،𝑇. 0 =
𝜃 𝑜
𝜃 𝑖
=
3
2+1.6𝐷
=
1.5
1+0.8𝐷
الزمن ثابت َّفإن بالتالي𝛕:
𝜏 = 0.8 𝑆
ﻛان إذا ][بθi = 30 sin 𝑝𝑡،َّﻓإن:
𝜃 𝑜 = 30 𝑠𝑖𝑛 𝑝𝑡 ×
1.5
1 + 0.8𝐷
ﺑاﻟﺷﻛل اﻻﻧﺗﻘال ﻋامل يﻛون𝑘/(1 + 𝜏𝐷)ﺣيث𝑘 = 1.5اﻟمﻌادﻟﺔ من وﺑاﻟﺗاﻟﻲ:
𝜃 𝑜 =
𝑎𝑘
√(1 + 𝑝2 𝜏2)
𝑠𝑖𝑛( 𝑝𝑡−∝)
ﺣيث∝= 𝑡𝑎𝑛−1
𝑝𝜏
𝑖. e. θo =
30 × 1.5
√1 + (2 × 0.8)2
sin[2t − tan−1(2 × 0.8)]
= 23.85 sin(2𝑡 − 58°)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-101-320.jpg)
![ﺑمطال ﺟيﺑيﺔ ﺣرﻛﺔ ﻟه اﻟﻛﺑاس ﻓإن ھﻛذا23.85𝑚𝑚مﻘدارھا ﺑزاويﺔ اﻟدﺧل ﻋن ًامﺗأﺧر58°.
4ﻟﺳفيﻧﺔ ﻗيادة ﺗروس مﻧظومﺔ ]اﺳطواﻧﺔ إﻟﻰ ﺑاﻟدﺧول ﻟﻠزيت يﺳمح ﺣيث ًاھايدروﻟيﻛي ﺗﻌمل
اﻟﺳفيﻧﺔ ﻗيادة ﺑﻌﺟﻠﺔ يﻌمل امَّمﺻ ﺧالل اﻟﺗﺷغيل.( اﻟﺳفيﻧﺔ دﻓﺔ إﻟﻰ اﻟواﺻل اﻟﻌزم يﺗﻧاﺳبRudder)
ويﺳاوي اﻟﺻمام ﻋمود ﺣرﻛﺔ مﻊ1𝐾𝑁. 𝑚مﻘدارھا ﻟﺣرﻛﺔ1𝑚𝑚من اﻟﻧاﺷئ اﻟمﻘاومﺔ ﻋزم .
يﺳاوي اﻟدﻓﺔ إﻟﻰ اﻟماء6.5𝐾𝑁. 𝑚مﻘدارھا ﺑﺳرﻋﺔ1𝑟𝑎𝑑/𝑠.
اﻟﻘيادة ﺑﻌﺟﻠﺔ يﺗﺻل اﻟﺻمام أن إﻟﻰ ﺑاﻹضاﻓﺔﺣرﻛﺗه ﺗﻛون ﺑﺣيث ﺑاﻟدﻓﺔ أيضا يﺗﺻل( ﺑاﻟـmm)
ﺑاﻟمﻌادﻟﺔ ﺗﻌطﻲ(6.25∅ − 15θ)ﺣيث𝜃و ∅ﺑاﻟـ اﻟﺗرﺗيب ﻋﻠﻰ واﻟدﻓﺔ اﻟﻌﺟﻠﺔ زاويﺗﻲ ھما
( 𝑟𝑎𝑑).
ﻟﺣظيﺔ ازاﺣﺔ اﻟﻌﺟﻠﺔ ﺗﻌطﻰ )اﻟﺳﻛون (ﺣاﻟﺔ اﻟدﻓﺔ ﺗﻧﺣرف ﻻ ﻋﻧدما ما ﻟﺣظﺔ ﻓﻲمﻘدارھا90°
وضﻊ ﻓﻲ وﺗﻛوناﻻﻧﺣراف.
اﻟﺗﻲ اﻟزاويﺔ ھﻲ ماﻓيﮭا ﺗدوراﻟدﻓﺔھو وماﻟﺗدور اﻟالزم اﻟزمنﺧالل اﻟدﻓﺔھذه أﻋﺷار ﺗﺳﻊ
؟ اﻟزاويﺔ
اﻟﺣل:
إزاﺣﺔاﻟﺻمام ﻋمود∝اﻟﺳفيﻧﺔ دﻓﺔ اﻟﻲ اﻟواﺻل اﻟﻌزم( 𝑇)
𝑇 = 1𝐾𝑁. 𝑚 = 1 × 103
𝑁. 𝑚
اﻻزاﺣﺔ = 1𝑚𝑚 ،𝑇/𝑚𝑚 = 1 × 103
𝑁. 𝑚
:الدفة إلﻰ الماء من الناشئ المقاومة عزم
TR = 6.5𝐾𝑁. 𝑚 = 6.5 × 103
𝑁. 𝑚
ω = 1𝑟𝑎𝑑/𝑠
∴ 𝐶 =
𝑇
𝜔
=
6.5 × 103
1
= 6.5 × 103
𝑁. 𝑚/( 𝑟𝑎𝑑 𝑆⁄ )
إﻟﻰ ﺑاﻹضاﻓﺔ اﻟﺻمامﺑاﻟدﻓﺔ ًاأيض يﺗﺻل اﻟﻘيادة ﺑﻌﺟﻠﺔ يﺗﺻل اﻧه
= (6.25∅ − 15θ) 𝑚𝑚اﻹزاﺣﺔ
ﺣيث≡ ∅اﻟﻘيادة ﻋﺟﻠﺔ إزاﺣﺔ
≡ θاﻟدﻓﺔ إزاﺣﺔ
( ﺧطوة دﺧل ھو األﺳﻰ اﻟﺗأﺧر ﻋامل ﻧوعStep input)
اﻟﺳﻛون (ﺣاﻟﺔ،)اﻻﻧﺣراف ﻋدمθ = 0
∅ = 90° =
90 × π
180
=
π
2
𝑟𝑎𝑑
θ =?
𝑡 𝑎𝑡 0.9𝜃 =?](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-102-320.jpg)
![معادلة:الحركة
(6.25∅ − 15θ) × 103
− 6.5 × 103
𝐷𝜃 = 𝐼𝐷2
𝜃
(6.25∅ − 15θ) × 103
− 6.5 × 103
𝐷𝜃 = 0
6.5𝐷𝜃 + 15𝜃 = 6.25∅
θ[6.5D + 15] = 6.25∅
𝜃
∅
=
6.25
15 + 6.5D
الخطوة لدخل االستجابة:
15θ + 6.5Dθ = 6.25∅
∅ =
𝜋
2
( المستقرة الحالةP.I):
θ = 𝐾 = ∅
𝐷𝜃 = 0
15𝑘 + 0 = 6.25 ×
𝜋
2
∴ 𝑘 =
6.25𝜋
2
×
1
15
= 0.208𝜋
∴ θ = 𝑘 = 0.208𝜋
( المستقرة غير الحالةC.F):
θ = 𝑅𝑒 𝑠𝑡
𝐷𝜃 = 𝑠𝑅𝑒 𝑠𝑡
15𝑅𝑒 𝑠𝑡
+ 6.5𝑆𝑅𝑒 𝑠𝑡
= 0
𝑅𝑒 𝑠𝑡[15 + 6.5𝑆] = 0
𝑠 = −
15
6.5
= −2.31](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-103-320.jpg)
![θ = 𝑃. 𝐼 + 𝐶. 𝐹،اﻟﻛامل اﻟﺣل
θ = 0.208𝜋 + 𝑅𝑒−2.31𝑡
" الحدودية الشروطBoundary conditions":
ﻋﻧد𝜃 𝑜 = 0 و 𝑡 = 0
0 = 0.208𝜋 + 𝑅
𝑅 = −0.208𝜋
:الكامل الحل
θ = 0.208𝜋 − 0.208𝜋𝑒−2.31𝑡
θ = 0.208𝜋(1 − 𝑒−2.31𝑡)
ﻋﻧد𝑡 = ∞،
θ = 0.208𝜋(1 − 0) = 0.208𝜋
0.9 × 0.208𝜋 = 0.208𝜋(1 − 𝑒−2.31𝑡)
0.9 = 1 − 𝑒−2.31𝑡
e−2.31t
= 0.1
الطرفين علﻰ الطبيعي اللوغاريثم بأخذ:
𝐿𝑛e−2.31t
= 𝐿𝑛0.1
∴ −2.31𝑡 𝐿𝑛𝑒 = 𝐿𝑛0.1
∴ 𝑡 =
𝐿𝑛0.1
𝐿𝑛𝑒
× −
1
2.31
= 0.997𝑠
2.3اﻻﺳﻲ رُّﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ مﺳائل:
1مﻘداره زمن ﺑﺛاﺑت ﺛيرموميﺗر ]6𝑠ﺣرارة درﺟﺔ ﻋﻧد أﺧذه يﺗمﺑمﻘدار ﻏرﻓﺔ15𝐶°ويغمر
ﻋﻧد ﺳائل ﻓﻲ60 C°،ﺑﻌد اﻟﺛيرموميﺗر ﺳيﻘرأ ماذا5𝑠.
𝑨𝒏𝒔. ( 𝟒𝟎. 𝟓𝑪°)
2ﻏرﻓﺔ ﺣرارة درﺟﺔ ﻋﻧد ﺛيرموميﺗر ]15℃اﻟﺣرارة درﺟﺔ ﻓﻲ مفاﺟﻲء ﻻرﺗفاع ﺗﻌريضه يﺗم،
مﻘدارھا ﻗراءة أوضح ﺣيث55C°ﺧالل3.55وﺑﻌد3.5𝑠إضاﻓيﺔ،اﻟﻘراءة أﺻﺑﺣت75𝐶°.أوﺟد
اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟمطﺑق واﻻرﺗفاع ﻟﻠﺛيرموميﺗر اﻟزمن ﺛاﺑت.
𝑨𝒏𝒔( 𝟓. 𝟎𝟒𝒔 ، 𝟗𝟎. 𝟗𝑪°)
3اﻟﺣراريﺔ موﺻﻠيﺗه ﻏاز ﺛيرموميﺗر ]0.02𝑊/𝐶°اﻟﺣراريﺔ وﺳﻌﺗه0.1𝐽/𝐶°.
ﻟﻠﺛيرموميﺗر اﻟزمن ﺛاﺑت ﺣدد ]أ.
اﻟﺣرارة درﺟﺔ ﻋﻧد اﻟﺛيرموميﺗر ﻛان إذا ]ب20𝐶°.ﺑﻌد اﻟﻘراءة أﺣﺳب10𝑠ﺳائل ﻓﻲ ﻏمره من
ﺣرارﺗه درﺟه80℃.
4ﻏاليﺔ ﻓﻲ اﻟﺣرارة ﺳريان يﻛون ]1.5( 𝜃𝑖 − 𝜃 𝑜) 𝑘𝑤ﺣيث𝜃𝑖اﻟمﺗﺣﻛم ضﺑط ھو
(controller settingو )𝜃 𝑜اﻟغاليﺔ ﺣرارة درﺟﺔ ھﻲ.ﻟﻠغاليﺔ اﻟﺣراريﺔ اﻟﺳﻌﺔﻟـ مﺳاويﺔ ﺗﻛون
150 𝑘𝑗/𝐶°.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-104-320.jpg)
![.ﻟﻠغاليﺔ اﻟزمن وﺛاﺑت اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل ﻋﻠﻰ لَّﺻﺗﺣ ]أ
ﻋﻧد ﺑاﺳﺗﻘرار ﺗﺷﺗغل اﻟغاليﺔ ﻛاﻧت إذا ]ب100𝐶°إﻟﻰ ﻓﺟأة اﻟمﺗﺣﻛم ضﺑط إﻋادة وﺗمت200𝐶°،
إﻟﻰ ﻟﺗﺻل اﻟغاليﺔ ﺣرارة درﺟﺔ ﺳﺗﺳﺗغرﻗه اﻟذي اﻟزمن ھو ما100℃.
𝑨𝒏𝒔( 𝟏( 𝟏 + 𝟏𝟎𝟎𝑫)، 𝟏𝟎𝟎𝒔، 𝟔𝟗. 𝟑𝒔)
5أدﻧاه اﻟﺷﻛل من ]،اﻟدﺧل ﺗﺣريك َّمﺗ إذا𝑥iﺑﺳرﻋﺔ اﻹﺗزاﻧﻲ وضﻌه من ﺑاﺳﺗﻘرار5𝑚𝑚/𝑠،
:أوجد
ﺑﻌد اﻟﻛﺑاس ﺣرﻛﺔ ]أ4𝑠.اﻟﺗﺷغيل ﺑدايﺔ من
ﻛان إذا ]جﺣرارة درﺟﺔ ﻋﻧد اﻟﺛيرموميﺗر20℃ﺑﻌد اﻟﻘراءة ﻓأﺣﺳب10𝑠اﻟﺳائل ﺗﺳﺧين من
ﺑمﻌدل ﺑه اﻟمﺣيط2°𝑐/𝑠مﻘدارھا ﺣرارة درﺟﺔ من ًاﺑدء20°𝑐.
𝑨𝒏𝒔( 𝟓𝒔، 𝟕𝟏. 𝟗℃، 𝟑𝟏. 𝟑𝟓℃)
مﺳاﻓﺔ ﻟيﺗﺣرك ﻟﻠﻛﺑاس اﻟمأﺧوذ اﻟزمن ]ب20𝑚𝑚.
𝑨𝒏𝒔( 𝟑𝟏. 𝟏𝒎𝒎، 𝟐. 𝟖𝟔𝟑𝒔)
6اﻟدﺧل إﻋطاء َّمﺗ إذا ،اﻟﺳاﺑﻘﺔ اﻟمﺳأﻟﺔ ﻓﻲ ﻟﻠﺷﻛل ﺑاﻟرﺟوع ]𝑥𝑖ﺑمطال ﺟيﺑيﺔ ﺣرﻛﺔ20 𝑚𝑚
وﺗردد1𝐻𝑍،اﻟﻛﺑاس ﻟﺣرﻛﺔ اﻟمﺳﺗﻘرة اﻟﺳﻌﺔ أوﺟد،.اﻟﺗأﺧر وزاويﺔ
𝑨𝒏𝒔( 𝟔. 𝟗𝟕𝒎𝒎، 𝟖𝟎℃)
7مﻘدارھا ﺳطح ﺑمﺳاﺣﺔ ﺻغيرة ﺑﺣيرة ]104
m2
إﻟﻰ اﻟﺳريان ﻗياس ويﺗم ﺑﺟدول ﺗغذيﺗﮭا يﺗم
ﺑواﺳطﺔ اﻟﺧارجھدار( 𝑤𝑒𝑖𝑟)ﺑـ اﻟﺳريان مﻌدل إﻋطاء يﺗم𝒬 = 5ℎ
3
2⁄
𝑚3
/𝑠ﺣيثℎھو
اﻟماء ﺳمتﺑاألمﺗار اﻟﮭدار ﻓوق.
اﻟدﺧﻠﻲ واﻟﺳريان اﻟﺧرﺟﻲ اﻟﺳريان ﺑين ﻋالﻗﺔ ﻋﻠﻰ ﺗﺣﺻل ]أﻓﻲ ﺻغيرة ﻟﺗفاوﺗاتℎ.
و مﺳﺗﻘرة األﺣوال ﺗﻛون ﻋﻧدما ]بℎﻟـ مﺳاويﺔ0.1𝑚،اﻟﺳريان زيادة ﻓﻲ ﺗﺗﺳﺑب ﻋاﺻفﺔ ھﻧاﻟك
ﺑمﻘدار ﺑاضطراد اﻟدﺧﻠﻲ10−4
𝑚3
/𝑠:اﻟﮭدار ﻓوق اﻟﺳريان مﻌدل أوﺟد .ﺛاﻧيﺔ ﻛل](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-105-320.jpg)
![1.اﻟمﺳﺗﻘرة األﺣوال ﺗﺣت ]
2ﺑﻌد ]20اﻟﻌاﺻفﺔ ﺑدايﺔ من دﻗيﻘﺔ.
𝑨𝒏𝒔 ∙ (
𝓠 𝟎
𝓠𝒊
=
𝟏
𝟏 + (
𝟒𝟎𝟎𝟎
𝟑√𝒉
) 𝑫
، 𝟎. 𝟏𝟓𝟖𝒎 𝟑
/𝒔 ، 𝟎. 𝟏𝟕𝟑𝟕𝒎 𝟑
/𝒔)
8داﺧل إﻟﻰ اﻟزيت يﺗدﻓق ﺣيث ھايدروﻟيﻛﻲ مرﺣل ﺑواﺳطﺔ ﺗﺷغيﻠﮭا يﺗم ﺑاﺧرة ﺗوﺟيه دﻓﺔ ]
إزاﺣﺗﮭا ﻓﻲ يﺗﺣﻛم ﺻمام ﻋﺑر اﻟمرﺣل اﺳطواﻧﺔاﻹﻏالق موضﻊ مناﻟﻘيادة ﻋﺟﻠﺔ ﺑواﺳطﺔ.
اﻟﺻمام إزاﺣﺔ مﻊ ًاطرد يﺗﻧاﺳب اﻟدﻓﺔ ﻋﻠﻰ اﻟمﺳﻠط اﻟﻌزميﻌادل ﺑما1𝑚𝑚 ﻟﻛل 105𝑁. 𝑚
إزاﺣﺔ،ويﺳاوي دوراﻧﮭا ﺳرﻋﺔ مﻊ ًاطرد يﺗﻧاﺳب اﻟدﻓﺔ ﻟدوران اﻟماء ومﻘاومﺔ675 𝑁. 𝑚( 𝑟𝑎𝑑/
𝑠).
وإزاﺣﺗه اﻟﻘيادة ﺑﻌﺟﻠﺔ اﺗﺻاﻟه ﺟاﻧب إﻟﻰ ﺑاﻟدﻓﺔ مﺗﺻل اﻟﺻمام(6.25𝜃𝑖 − 15𝜃0)mmﺣيث
θ 𝑂 و θi.اﻟﺗواﻟﻲ ﻋﻠﻰ واﻟدﻓﺔ اﻟﻘيادة ﻋﺟﻠﺔ ﻹزاﺣﺔ يرمزان
ﺑمﻘدار ﻓﺟأة اﻟﻘيادة ﻋﺟﻠﺔ ازاﺣﺔ مَّﺗ إذا90°اﻻزاﺣﺔ ﻟﺑﻠوغ واﻟزمن اﻻﺳﺗﻘراريﺔ اﻟدﻓﺔ ازاﺣﺔ أوﺟد
اﻻﺳﺗﻘراريﺔ اﻻزاﺣﺔ أﻋﺷار ﺗﺳﻊ.
𝑨𝒏𝒔( 𝟎. 𝟐𝟎𝟖𝟑𝝅 𝒓𝒂𝒅 ، 𝟎. 𝟗𝟖𝟖𝒔)
9ﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔ ﺗدار ﺣداﻓﺔ ]،دﺧل ﺑوﺗﻧﺷيوميﺗر ضﺑط ﺑواﺳطﺔ ﺳرﻋﺗﮭا ﻓﻲ اﻟﺗﺣﻛم يﺗم
اﻟﺣﻠﻘﺔ مغﻠق ﺳرﻋﺔ ﺗﺣﻛم ﻧظام ﺑاﺳﺗﺧدام،اﻟﻘﺻور ﻋزميﻛون واﻟمﺣرك ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ
100𝑘𝑔𝑚2
،مﻘداره ﺳرﻋﺔ وﺧطأ1 𝑟𝑎𝑑 𝑠−1
مﻘداره اﻟﺣداﻓﺔ ﻋﻠﻰ ًاﻋزم يﻧﺗج.45𝑁. 𝑚اﻟﻌزم
اﻻﺣﺗﻛاﻛﻲيﻛون5𝑁. 𝑚اﻟﺣداﻓﺔ ﺳرﻋﺔ ﺗﻛون ﻋﻧدما1𝑟𝑎𝑑 𝑠−1
.
اﻟﺳﻛون ﻋﻧد ﺑاﻟﻧظام،اﻟدﺧﻠﻲ اﻟﺑوﺗﻧﺷيوميﺗر ضﺑط َّﻓإنﻓﺟأة يزدادإﻟﻰ ﺻفر من50𝑟𝑒𝑣/𝑚𝑖𝑛.
.ﻟﻠﺣداﻓﺔ اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺳرﻋﺔ ﺧطأ أﺣﺳب ،واﻟزمن اﻟمﺗﻌاﻗﺑﺔ اﻟﺣداﻓﺔ ﺳرﻋﺔ ﺑين اﻟﻌالﻗﺔ َّاﺷﺗق
𝑨𝒏𝒔(𝝎 𝒐( 𝒕) = 𝟏. 𝟓𝝅(𝟏 − 𝒆−𝟎.𝟓𝒕
)𝒓𝒂𝒅𝒔−𝟏
، 𝟓𝒓𝒆𝒗/𝒎𝒊𝒏)
10ﻗطره وﻋاء من ﻟﺳائل اﻟﺧرﺟﻲ اﻟﺳريان ]0.5𝑚اﻟوﻋاء ﻓﻲ اﻟماء ﻋﻠو مﻊ ًامﺗﻧاﺳﺑ يﻛون،
إﻟﻰ اﻟدﺧﻠﻲ اﻟﺳريان ﺑﺗﻧظيم يﻘوم اﻟﺳائل ﺑمﻧﺳوب ﺗﺷغيﻠه يﺗم ﻛروي ﺻمام ھﻧاﻟك0.125𝑥𝑚3
𝑠−1
ﺣيث ,𝑥مﻘدارھا مرﻏوﺑﺔ ﻗيمﺔ أﺳفل اﻟمﻧﺳوب ھﺑوط ھو1.5𝑚اﻹيﻘاف ﺻمام ﻓﺗح ﺗم إذا .ﻓﻲ
اﻟﺧ اﻟﺳريان أن ﺑﺣيث ﻓﺟأة اﻟﺧرﺟﻲ اﻟﺳريان ماﺳورةإﻟﻰ ﺻفر من يﺗغير رﺟﻲ0.01ℎ𝑚3
𝑠−1
،
ﺣيثℎاﻟفﻌﻠﻲ اﻟمﻧﺳوب ھوﻟﻠوﻋاء،:ِّدﺣد
.اﻟﺧزان ﻓﻲ اﻟﺳائل ﻟمﻧﺳوب اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﻗيمﺔ ]أ
اﻟﺧزان ﻓﻲ اﻟمﻧﺳوب يﮭﺑط ﻟﻛﻲ اﻟمأﺧوذ اﻟزمن ]ب8𝐶𝑚.
اﻟﺧرﺟﻲ واﻟﺳريان اﻟدﺧﻠﻲ ﻟﻠﺳريان اﻟﻠﺣظيﺔ اﻟﻘيم ]ج،ﺑـ اﻟﺻمام ﻓﺗح ﺑﻌد𝑡.ﺛاﻧيﺔ
𝑨𝒏𝒔 (𝟏. 𝟑𝟖𝟖𝒎، 𝟏. 𝟖𝟒𝟓𝒔 ، 𝟎. 𝟎𝟏𝟑𝟗(𝟏 − 𝒆−𝟎.𝟔𝟖𝟕𝟓𝒕
)، 𝟎. 𝟎𝟏𝟑𝟗(𝟏
+ 𝟎. 𝟎𝟕𝟗𝒆−𝟎.𝟔𝟖𝟕𝟓𝒕
))
2.4اﻟمرﻛب رُّﺧاﻟﺗأ داﻟﺔ أو ﻋامل ذات اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ:(Response of Complex
Lag Elements)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-106-320.jpg)

![∴ 𝑆 = ±
1
𝜏
√−1 = ±𝑗
1
𝜏
∴ 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡
= 𝑅𝑒±𝑗
𝑡
𝜏
:َّأن معلوم
ejθ
= cos 𝜃 + j sin θ → (2)
و
e−jθ
= cos 𝜃 − j sin θ → (3)
( المعادلتين بجمﻊ2( و )3علﻰ نتحصل ):
cos 𝜃 =
ejθ
+ e−jθ
2
( المعادلة وبطرح3( المعادلة من )2علﻰ نحصل ):
j sin θ =
ejθ
− e−jθ
2
∴ 𝜃 𝑜 = 𝑅 cos( 𝜃 − Ψ) = 𝑅 cos (
𝑡
𝜏
− Ψ)
:اﻟﻛامل اﻟﺣل𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹
∴ 𝜃 𝑜 = 1 + 𝑅 cos (
𝑡
𝜏
− Ψ) → (4)
الحدودية الشروط بتطبيق:
ﻋﻧد𝑡 = 𝑜و𝜃 𝑜 = 0( ﻟﻠمﻌادﻟﺔ4)
0 = 1 + 𝑅 cos(−Ψ) = 1 + 𝑅 cos Ψ
𝑅 cos Ψ = −1 ∴ 𝑅 =
−1
cos Ψ
ﻋﻧد𝑡 = 𝑜و𝐷𝜃 𝑜 = 0( ﻟﻠمﻌادﻟﺔ4)
𝐷𝜃 𝑜 = 0 + R [−
1
𝜏
sin (
𝑡
𝜏
− Ψ)] = 0
−
𝑅
𝜏
sin(−Ψ) = 0
∴
𝑅
𝜏
sin Ψ = 0 ∴ sin Ψ = 0
وﺑاﻟﺗاﻟﻲ:Ψ = sin−1
0 = 0
∴ 𝑅 =
−1
cos Ψ
=
−1
cos 𝑜
=
−1
1
= −1
∴ 𝜃 𝑜 = 1 − cos
𝑡
𝜏
= 1 − cos 𝜔 𝑛 𝑡
َّأن ﺑما(𝜔 𝑛 =
1
𝜏
)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-108-320.jpg)

![∴ 𝐷𝜃 𝑜 = 0 + 𝑅 [𝑒
−𝜁𝑡
𝜏 × −𝜔 𝑑 sin( 𝜔 𝑑 𝑡 − Ψ) + cos( 𝜔 𝑑 𝑡 − Ψ) ×
−𝜁
𝜏
𝑒
−𝜁𝑡
𝜏 ]
0 = 𝑅 [−𝜔 𝑑 sin(−Ψ) −
𝜁
𝜏
cos(−Ψ)]
0 = 𝜔 𝑑 𝑠𝑖𝑛 𝛹 −
𝜁
𝜏
𝑐𝑜𝑠 𝛹
𝜔 𝑑 sin Ψ =
𝜁
𝜏
cos 𝛹
sin Ψ
cos Ψ
= tan Ψ =
ζ
τωd
=
ωnζ
ωd
=
ωnζ
ωn√1 − ζ2
=
𝜁
√1 − 𝜁2
𝑡𝑎𝑛 Ψ =
𝜁
√1 − 𝜁2
∴ Ψ = sin−1
𝜁
√1 − 𝜁2
cos Ψ =
√1 − 𝜁2
1
= √1 − 𝜁2
𝑅 =
−1
cos Ψ
=
−1
√1 − 𝜁2
ﻟﻛن
∴ 𝜃 𝑜 = 1 −
1
√1 − 𝜁2
𝑒
−𝜁𝑡
𝜏 cos (
𝑡
𝜏
√1 − 𝜁2 − tan−1
𝜁
√1 − 𝜁2
)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-110-320.jpg)

![مﺗأرﺟح ﻏير اﻟمضاءﻟﺔ ﺣرج اھﺗزاز
Critically Damped Vibration (Non-Oscillatory)
:اﻟراﺑﻌﺔ اﻟﺣاﻟﺔ
ﻋﻧدما𝜁 > 1)المضاءلة زائد (تردد(over –damped frequency)
𝑆 =
−𝜁
𝜏
±
1
𝜏
√𝜁2 − 1
( المستقرة غير الحالةC.F:)
𝜃 𝑜 = 𝑅𝑒 𝑠𝑡
= 𝑅𝑒
(
−𝜁
𝜏
±
1
𝜏
√𝜁2−1)𝑡
الكامل الحل:𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹
𝜃 𝑜 = 1 + 𝑅𝑒
(
−𝜁
𝜏
±
1
𝜏
√𝜁2−1)𝑡
𝜃 𝑜 = 1 + 𝑅𝑒
−𝜁
𝜏 𝑡
[𝑒±
𝑡
𝜏
√𝜁2−1
]](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-112-320.jpg)
![اﻟمضاءﻟﺔ زائد اھﺗزاز()مﺗأرﺟح ﻏير
Over Damped Vibration (Non-Oscillatory)
2.5بَّﻛاﻟمر رُﺧأاﻟﺗ ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ أمﺛﻠﺔ:
1ﺣداﻓﺔ ].اﻟيدويﺔ اﻟﻌﺟﻠﺔ ﺣرﻛﺔ ﻟﺗﺗﺑﻊ ًاأوﺗوماﺗيﻛي ﻓيﮭا اﻟﺗﺣﻛم يﺗم ﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔ دارُﺗ
ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزميﻛون150𝑘𝑔𝑚2
ﻋﻠيﮭا َّقﺑاﻟمط اﻟمﺣرك وﻋزميﻛون
2400𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑اﻟمﺣاذاة ﻋدم مناﻟيدويﺔ واﻟﻌﺟﻠﺔ اﻟﺣداﻓﺔ ﺑين.ًامﻛاﻓئ يﻛون اﻟﻠزج اﻻﺣﺗﻛاك
مﻘداره ﻟﻌزم600𝑁. 𝑚 𝑟𝑎𝑑−1
𝑠اﻟﻌﺟﻠﺔ ﺗدوير َّمﺗ اذﺧالل ﻓﺟأة اﻟيدويﺔ60°
اﻟﻧظام يﻛون ﻋﻧدما
ﺳﻛون ﺣاﻟﺔ ﻓﻲ،.ﻟﻠزمن ﺑاﻟﻧﺳﺑﺔ ﻟﻠﺣداﻓﺔ اﻟزاوي ﻟﻠوضﻊ ًاﺗﻌﺑير ِّدﺣد
:اﻟﺣل
𝐼 = 150 𝑘𝑔𝑚2
, 𝜆 = 2400 𝑁. 𝑚/𝑟𝑎𝑑،اﻟذاﺗ اﻟﻘﺻور ﻋزمﻲ
𝐶 = 600 𝑁. 𝑚𝑠/𝑟𝑎𝑑،اﻟﻠزج اﻻﺣﺗﻛاك مﻌامل
𝜃𝑖 = 60° =
60×𝜋
180
=
𝜋
3
𝑟𝑎𝑑،اﻟيدويﺔ اﻟﻌﺟﻠﺔ ازاﺣﺔ
𝜃 𝑜( 𝑡) =?
الحركة معادلة:](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-113-320.jpg)
![λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝜃 𝑜
°
= 𝐼𝜃 𝑜
°°
λ𝜃𝑖 − λ𝜃 𝑜 − CD𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
λ𝜃𝑖 = λ𝜃 𝑜 + CD𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑇. 0 =
𝜆
𝜆+𝐶𝐷+𝐼𝐷2
اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل
والمقام البسط بقسمة𝛌 ÷:
𝜃 𝑜
𝜃𝑖
=
1
1 +
𝐶
𝜆
𝐷 +
𝐼
𝜆
𝐷2
اﻟمرﻛب رُﺧﻟﻠﺗأ اﻟﻘياﺳيﺔ ﻟﻠﺻورة مﻧاظر ھو واﻟذي،
1
1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2
∴ 2𝜁𝜏 =
𝐶
𝜆
، 2𝜁𝜏 =
600
2400
= 0.25 → (1)
𝜏2
=
𝐼
𝜆
=
150
2400
، ∴ 𝜏 = √
150
2400
= 0.25 sec → (2)ًاوأيض،
ﻗيمﺔ ﺑﺗﻌويضτ( اﻟمﻌادﻟﺔ من2( اﻟمﻌادﻟﺔ ﻓﻲ )1)،
2 × 0.25𝜁 = 0,25
∴ 𝜁 =
0.25
0.5
= 0.5
ان ﺑما𝜁 < 1اﻟمضاءﻟﺔ ﻧاﻗص يﻛون )(اﻻھﺗزاز اﻟﺗردد ﻓإن
𝜃 𝑜 = 𝜃𝑖 (1 + 𝑅𝑒
−𝜁𝑡
𝜏 cos( 𝜔 𝑑 𝑡 − Ψ))،اﻟﺧطوة داﻟﺔ اﺳﺗﺟاﺑﺔ
𝜃 𝑜 =
𝜋
3
(1 −
1
√1 − 𝜁2
𝑒
−𝜁𝑡
𝜏 cos (
𝑡
𝜏
√1 − 𝜁2 − tan−1
𝜁
√1 − 𝜁2
))
𝜽 𝒐 =
𝝅
𝟑
(𝟏 −
𝟏
√𝟏 − 𝟎. 𝟓 𝟐
𝒆(−𝟎.𝟓/𝟎.𝟐𝟓)𝒕
𝐜𝐨𝐬 (
𝒕
𝟎. 𝟐𝟓
√ 𝟏 − 𝟎. 𝟓 𝟐
− 𝐭𝐚𝐧−𝟏
𝟎. 𝟓
√𝟏 − 𝟎. 𝟓 𝟐
))
∴ 𝜃 𝑜 =
𝜋
3
[1 − 1.155𝑒−2𝑡
cos(3.46𝑡 − 0.58)]
2مﻘداره ذاﺗﻲ ﻗﺻور ﻋزم ﻟديه اﻟﺧرج ﻋﻧد اﻟﺣمل أن ﻧﺟد اﻟﺑﻌد ﻋﻠﻰ من ﺗﺣﻛم ﺟﮭاز ﻓﻲ ]
0.2𝑘𝑔 𝐶𝑚2
يﺳاوي اﻟمضاءﻟﺔ ومﻌامل0.6اﻟﺣرج اﻟمضاءﻟﺔ مﻌامل من.ًاﻋزم اﻟمﺣرك يﻌطﻲ
مﻘداره200𝜇𝑁. 𝑚/𝑟𝑎𝑑مضروﺑاﻟﺧطأ ﻓﻲ ًا.ﺷﻛل ﻓﻲ ﺗﺷويش إﻟﻰ اﻟﺧرج ﻋمود ﺗﻌرض إذا
ﻋﻧد اﻟﺧرج ﻟﻌمود ﻟﻠمﺟاوزة اﻟﻘﺻوى اﻟمئويﺔ اﻟﻘيمﺔ أﺣﺳب .اﻻﺗزان موضﻊ من مفاﺟئﺔ إزاﺣﺔ
.اﻟﻘﺻوى ﻗيمﺗه إﻟﻰ يﺻل ﻋﻧدما اﻟﺗﺷويش ھذا ﺑﻌد واﻟزمن اﻻﺗزان وضﻊ إﻟﻰ ﻟﻠرﺟوع مﺣاوﻟﺗه](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-114-320.jpg)

![دالة الستجابة الكامل الحل:الخطوة
𝜃 𝑜 = 1 −
1
√1 − 𝜁2
𝑒
−𝜁
𝜏
𝑡
cos (
𝑡
𝜏
√1 − 𝜁2 − tan−1
𝜁
√1 − 𝜁2
)
الصعود زمن(Rise time)( 𝐭 𝒓)إﻟﻰ األوﻟﻰ ﻟﻠمرة اﻻﺳﺗﺟاﺑﺔ ﻓيه ﺗﺻل اﻟذي اﻟزمن ھو :
.اﻟمﺳﺗﻘرة اﻟﻧﮭائيﺔ ﻗيمﺗﮭا
اﻷقصﻰ الزمن(Peak time)(𝒕 𝒑):.اﻟﻘﺻوى ﻗيمﺗﮭا إﻟﻰ اﻻﺳﺗﺟاﺑﺔ ﻓيه ﺗﺻل اﻟذي اﻟزمن ھو
االستقرار أو الضبط زمن(Settling time)( 𝒕 𝒔):ﺗﺗأرﺟح ان ﻗﺑل اﻟمطﻠوب اﻟزمن ھو
( من َّلأﻗ اﻻﺳﺗﺟاﺑﺔ5% إﻟﻰ 2%.اﻟمﺳﺗﻘرة اﻟﻧﮭائيﺔ ﻗيمﺗﮭا من )
𝑡 𝑝 =
𝜃
𝜔 𝑑
=
𝜋
𝜔 𝑑
=
𝜋
𝜔 𝑛√1−𝜁2
األﻗﺻﻰ اﻟزمن
∴ 𝑡 𝑝 =
𝜋
3.165√1 − 0.62
= 1.241 𝑠𝑒𝑐𝑜𝑛𝑑𝑠
𝜃 𝑜 = 1 −
1
√1 − 𝜁2
𝑒
−𝜁
𝜏 𝑡
cos (
𝑡
𝜏
√1 − 𝜁2 tan−1
𝜁
√1 − 𝜁2
)
𝜃 𝑜 = 1 −
1
√1 − 0.62
𝑒
−0.6
0.316
×1.241
cos [(
1.241
0.316
√1 − 0.62
− tan−1
0.6
√1 − 0.62
×
𝜋
180
) ×
180
𝜋
]
∴ 𝜃0 = 1 + 0.0948 = 1.0948 𝑟𝑎𝑑
= 1 − 0.0948 = 1.0948 𝑟𝑎𝑑،اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة
𝑃. 𝑜 =
0.0948
1
× 100% = 9.48%اﻟﻘﺻوى ﻟﻠمﺟاوزة اﻟمئويﺔ اﻟﻧﺳﺑﺔ
القصوى المجاوزة حساب يمكن ًاأيضكاآلتي المئوية:
𝑃. 𝑂 = 100 𝑒−𝜁𝜋/√1−𝜁2](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-116-320.jpg)
![∴ 𝑃. 𝑂 = 100 𝑒−0.6𝜋/√1−0.62
= 9.48%
يلي كما حسابها يمكن أو:
𝑃. 𝑂 = 100 𝑒
−𝜁
𝜏 𝑡
= 100 𝑒
−0.6
0.316×1.241
= 9.48%
3مضاءﻟﺔ ﺑواﺳطﺔ ما ﺣد إﻟﻰ اﺳﺗﻘرارھا يﺗم ارة َّدو ﻛﺗﻠﺔ وضﻊ ﻓﻲ ﻟﻠﺗﺣﻛم مؤازرة مﻧظومﺔ ]
ﺗﺳاوي ﻟزﺟﺔ اﺣﺗﻛاكاﻟمطﻠوﺑﺔ اﻟﺣرﺟﺔ اﻟمضاءﻟﺔ أرﺑاع ﺛالث.ﻗيمﺔ ﻛاﻧت إذااﻟﺣر اﻟطﺑيﻌﻲ اﻟﺗردد
ھﻲ ﻟﻠمﻧظومﺔ )اﻟمﺧمد (ﻏير12 𝐻𝑍.
ومﻧه اﻟﺳﻛون من ﺟديد وضﻊ إﻟﻰ ﻓﺟأة اﻟدﺧل مﺗﺣﻛم ﺗﺣريك َّمﺗ إذا اﻟمﻧظومﺔ ﻟﺧرج ًاﺗﻌﺑير اﺷﺗق
اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة أوﺟد.ﻟالﺳﺗﺟاﺑﺔ
:اﻟﺣل
معطياتالمسألة:
c = 0.75c 𝑐
∴
𝑐
𝑐 𝑐
𝜁 = 0.75
𝜔 𝑛 = 12𝐻𝑍 =
12𝑐𝑦𝑐𝑙𝑒𝑠
𝑠𝑒𝑐
= 12 × 2𝜋 = 75.4𝑟𝑎𝑑/𝑠
τ =
1
𝜔 𝑛
= 0.01326 𝑠𝑒𝑐
:الحركة معادلة
λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝜃 𝑜
0
= I𝜃 𝑜
00
λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜
0
= ID𝜃 𝑜
00
λ𝜃𝑖 − λ𝜃 𝑜 − 𝐶𝐷 𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
= 𝜃 𝑜[ 𝜆 + 𝐶𝐷 + 𝐼𝐷2]
𝜃 𝑜
𝜃𝑖
=
𝜆
𝜆 + 𝐶𝐷 + 𝐼𝐷2 =
1
1 +
𝐶
𝜆
𝐷 +
𝐼
𝜆
𝐷2
مرﻛب ﺗأﺧر ﻟﻧظام اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ مﻧاظرة ﺗﻛون واﻟﺗﻲ
1
1+2𝜁𝜏𝐷+𝜏2 𝐷2](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-117-320.jpg)


![𝜽 𝟎 = 𝟏 −
𝟏
𝟏 − 𝟎. 𝟕𝟓 𝟐 𝒆
−𝟎.𝟕𝟓
𝟎.𝟎𝟏𝟑𝟐𝟔×𝟎.𝟎𝟔𝟑
𝐜𝐨𝐬 ((
𝟎. 𝟎𝟔𝟑
𝟎. 𝟎𝟏𝟑𝟐𝟔
√ 𝟏 − 𝟎. 𝟕𝟓 𝟐
− (𝐭𝐚𝐧−𝟏
𝟎. 𝟕𝟓
√𝟏 − 𝟎. 𝟕𝟓
) ×
𝝅
𝟏𝟖𝟎
) ×
𝟏𝟖𝟎
𝝅
)
𝜃 𝑜 = 1 + 0.0284 = 1.0284 𝑟𝑎𝑑
= 1.0284 − 1 = 0.0284اﻟﻘﺻوى اﻟمﺟاوزة
𝑃. 𝑂 = 0.0284 × 100 − 2.84%اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة
4اﻟزاويﺔ اﻹزاﺣﺔ ﻓﻲ ﺗﺗﺣﻛم اﻟوضﻊ ﻓﻲ مٌّﻛﺗﺣ مﻧظومﺔ ]مﻊ ًاطرد يﺗﻧاﺳب ﻋزم ﺑﺗﺳﻠيط ﻟﻠﺣموﻟﺔ
ﻟﻠﺣموﻟﺔ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم .)واﻟﺧرج اﻟدﺧل ﺑين اﻟفرق (أي اﻟﺧطأ340𝑘𝑔𝑚2
اﻟﺗﺧميد ومﻌامل
يﺳاوي8000𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)يﻛون ﻋﻧدمااﻟدﺧل10𝑑𝑒𝑔/𝑠.يﺳاوي اﻟمﺳﺗﻘر اﻟﺧطأ0.25°،
:أوﺟد
اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘.
اﻟﺗﺧميد ﻧﺳﺑﺔ ]ب.
.اﻟمﺧمد اﻟطﺑيﻌﻲ اﻟﺗردد ]ج
.مﺧمد اﻟغير اﻟطﺑيﻌﻲ اﻟﺗردد ]د
اﻟﺣل:
:الحركة معادلة
𝑘( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 − 𝑘𝜃 𝑜 − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 = 𝑘𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 = 𝜃 𝑜[ 𝑘 + 𝐶𝐷 + 𝐼𝐷2]
𝑇. 0 =
𝜃 𝑜
𝜃 𝑖
=
𝑘
𝑘+𝐶𝐷+𝐼𝐷2
اﻻﻧﺗﻘال او اﻟﺗﺣويل ﻋامل
والمقام البسط بقسمة𝒌%علﻰ نحصل:
𝜃 𝑜
𝜃𝑖
=
1
1 +
𝐶
𝐾
𝐷 +
𝐼
𝐾
𝐷2](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-120-320.jpg)
![ﻟﻠﺻيغﺔ مﻧاظر ھو واﻟذياﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ
1
1+2ζτD+τ2D2
:المسألة معطيات
𝐶 = 8000𝑁.
𝑚
(
𝑟𝑎𝑑
𝑠
)
, 𝐼 = 340𝑘𝑔𝑚2
اﻟﺗﺧميد مﻌامل
ωi = 10°
/s =
10°
× π
180
= 0.1745rad/s
∈ss= 0.25° = 0.25 ×
𝜋
180
= 0.00436𝑟𝑎𝑑،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ
اﻧﺣدار ﻟدﺧل اﺳﺗﺟاﺑﺔ
𝜃𝑖 = ω𝑡
( المستقرة الحالةP.I:)
𝐷𝜃 𝑜 = ω
𝐷2
𝜃0 = 0
𝜃 𝑜 + 2ζτ𝐷𝜃 𝑜 + 𝜏2
𝐷2
𝜃 𝑜 = 𝜃𝑖
ω𝑡 + 𝒬 + 2ζτω + 0 = ωt
∴ 𝒬 = −2ζτω
𝜃 𝑜 = ω𝑡 − 2ζτω،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ اﺳﺗﺟاﺑﺔ
θ𝑖 = ω𝑡
∈ss= θi − θo = ωt − ωt + 2ζτω = 0.0043،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ
∈ss= 0.00436 = 2ζτω
ﻟﻛن،ω = 0.1745𝑟𝑎𝑑/𝑠
∴ 0.00436 = 2ζτ × 0.1745
∴ 2ζτ =
0.00436
0.1745
= 0.025 → (1)
اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘:
𝑘 =
𝐶
2ζτ
=
8000
0.025
= 320,000𝑁. 𝑚/𝑟𝑎𝑑
= 320𝐾𝑁. 𝑚/𝑟𝑎𝑑
اﻟﺗﺧميد ﻧﺳﺑﺔ ]بζ:
τ2
=
I
K
∴ τ = √
I
K
= √
340
320 × 103 = 0.0326𝑠/𝑟𝑎𝑑
2ζ × 0.0326 =
8000
320×103
∴ ζ =
8000
2 × 0.0326 × 320 × 103
= 0.383
اﻟمﺧمد اﻟطﺑيﻌﻲ اﻟﺗردد [ج𝜔d:](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-121-320.jpg)
![ωd = ωn√1 − ζ2
ωn =
1
τ
=
1
0.0326
= 30.7𝑟𝑎𝑑/𝑠
∴ ωd = 30.7√1 − 0.3832 = 28.36 𝑟𝑎𝑑/𝑠
اﻟمﺧمد ﻏير اﻟطﺑيﻌﻲ اﻟﺗردد ]د𝜔n:
ωn = 30.7 𝑟𝑎𝑑/𝑠
5مدﻓﻊ ﻗاﻋدة ﻛﺗﻠﺔ ]ﻟﻠطائرات مضاد7.5 𝑀𝑔دوراﻧﮭا مﺣور ﺣول اﻟﺗدويمﻲ اﻟﻘطر وﻧﺻف
0.76 𝑚،ﺑﻌد من ﻟﻠمدﻓﻊ اﻟزاويﺔ ﻟإلزاﺣﺔ اﻟﺧطأ ﺗفاضل زائد طردي ﺗﺣﻛم ﺟﮭاز يﺳﺗﺧدم.مﻌامل
اﻟمدﻓﻊ مﺣور ﺣول اﻟﺗﺧميد10.9 𝐾𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،ﻗﺻوى ﺑﺳرﻋﺔ اﻟمدﻓﻊ ﺗﺣريك ﻋﻧدمﻘدارھا
25 𝑟𝑒𝑣/𝑚𝑖𝑛ﻋن اﻟﺗﺧﻠف يزيد أﻻ يﺟب2°ﺗﺳاوي اﻟﺗﺧميد وﻧﺳﺑﺔ0.5،:أوﺟد
ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت ]أ.اﻟﺧطأ
مفاﺟئ دﺧل ﺗﺳﻠيط ﻋﻧد اﻟدورة زمن ]ب.
اﻟﺣموﻟﺔ ﺗﺣريك ﻋﻧد اﻟمؤازرة مﺣرك ﻗدرة ]ج.اﻟﻘﺻوى ﺑاﻟﺳرﻋﺔ
:اﻟﺣل
kG = 0.76 𝑚 ، 𝑚 = 7.5 × 103
𝑘𝑔،ﻋزم ﻗطر ﻧﺻف أو اﻟﺗدويمﻲ اﻟﺣرﻛﺔ ﻗطر ﻧﺻف
اﻟذاﺗﻲ اﻟﻘﺻور.
𝐼 = 𝑚𝐾 𝐺
2
= 7.5 × 103
× 0.762
= 4332𝑘𝑔𝑚2
،اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم
𝐶 = 10.9 × 103
𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،اﻟمدﻓﻊ مﺣور ﺣول اﻟﺗﺧميد مﻌامل
𝑁 𝑚𝑎𝑥 = 25𝑟𝑒𝑣/𝑚𝑖𝑛
ωmax =
25×2π
60
= 2.618𝑟𝑎𝑑/𝑠،اﻟﻘﺻوى اﻟﺳرﻋﺔ
∈ss=
2°×𝜋
180
= 0.035𝑟𝑎𝑑،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ
ζ = 0.5،اﻟﺗﺧميد ﻧﺳﺑﺔ
اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت𝑘1](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-122-320.jpg)
![انحدار لدخل االستجابة،
θi = ω𝑡
( اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔP.I:)
𝜃 𝑜 = ω𝑡 + 𝒬
Dθo = ω
D2
θo = 0
اﻟﺣرﻛﺔ مﻌادﻟﺔ:
𝑘( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 − 𝑘𝜃 𝑜 − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 = 𝑘𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
= 𝜃 𝑜[ 𝑘 + 𝐶𝐷 + 𝐼𝐷2]
𝜃 𝑜
𝜃𝑖
=
𝑘
𝑘 + 𝐶𝐷 + 𝐼𝐷2
𝜃 𝑜
𝜃𝑖
=
1
1 +
𝐶
𝐾
𝐷 +
𝐼
𝐾
𝐷2
اﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ مﻧاظرة ھﻲ واﻟﺗﻲ
1
1+2ζτD+τ2D2
𝜃 𝑜 +
𝑐
𝑘
𝐷𝜃 𝑜 +
1
𝑘
𝐷2
𝜃 𝑜 = 𝜃𝑖
𝜔𝑡 + 𝒬 +
𝑐
𝑘
𝜔 +
𝐼
𝑘
× 0 = 𝜔𝑡
ω𝑡 + 𝒬 +
𝑐
𝑘
𝜔 = 𝜔𝑡
∴ 𝒬 = −
𝑐
𝑘
𝜔
ﻟﻛن𝜃 𝑜 = ω𝑡 + 𝒬
∴ 𝜃 𝑂ω𝑡 −
𝑐
𝑘
𝜔
θi = ω𝑡
∈ss= 𝜃i − 𝜃 𝑜،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﻓﻲ ﺧطأ
∈ 𝑆𝑆= ωt − (𝜔t −
c
k
ω)
∴∈ 𝑆𝑆= ω𝑡 − 𝜔𝑡 +
𝑐
𝑘
𝜔 =
𝑐
𝑘
𝜔
اﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ اﻟﺻورة مﻊ اﻻﻧﺗﻘال داﻟﺔ ﺑﺗﻧاظر،
𝑐
𝑘
= 2𝜁𝜏 → (1)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-123-320.jpg)
![𝐼
𝑘
= 𝜏2
→ (2)
َّأن وﺑما،∈ss=
𝐶
K
ω → (3)أن ﺑما
في بالتعويض( المعادلة3:)
0.035 =
10.9 × 103
𝑘
× 2.618
∴ 𝑘 =
10.9 × 103
×× 2.618
0.035
= 815320𝑁. 𝑚/𝑟𝑎𝑑
= 815.32𝐾𝑁. 𝑚/𝑟𝑎𝑑
( المعادلة من2)
I
𝑘
= τ2
،
4332
815.32 × 103
= 𝜏2
∴ τ = 0.0729𝑠𝑒𝑐/𝑟𝑎𝑑
ﻟﻠﺧطأ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﺑإضاﻓﺔ،
:الحركة معادلة
𝑘(∈ +𝑘1 𝐷 ∈) = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
∈= θi − 𝜃 𝑜
𝑘[( 𝜃𝑖 − 𝜃 𝑜) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃 𝑜)] = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 − 𝑘𝜃 𝑜 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃 𝑜 = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃 𝑜 + 𝑘𝑘1 𝐷𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝜃 𝑜[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐶𝐷 + 𝐼𝐷2]
𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝑘𝜃 𝑜 [1 + 𝑘1 𝐷 +
𝐶
𝐾
𝐷 +
𝐼
𝐾
𝐷2
]](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-124-320.jpg)
![𝑇. 0 =
𝜃 𝑜
𝜃𝑖
=
1 + k1D
1 + (𝑘1 +
𝐶
𝐾
) 𝐷 +
𝐼
𝐾
𝐷2
𝜃 𝑜
𝜃𝑖
=
1 + k1D
1 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝐷 +
𝐼
𝐾
𝐷2
→ (3)
:القياسية للصيغة مناظرة هي والتي
1
1 + 2ζτD + τ2D2
𝜃 𝑜 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝐷𝜃 𝑜 +
𝐼
𝐾
𝐷2
𝜃 𝑜 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖
:االنحدار لدخل االستجابة
θi = ω𝑡
𝐷θi = ω
( المستقرة الحالةP.I):
𝜃 𝑜 = ω𝑡 + 𝒬
Dθo = ω
D2
θo = 0
ω𝑡 + 𝒬 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔
𝒬 = 𝑘1 𝜔 − (
𝑘𝑘1 + 𝑐
𝑘
) 𝜔 = [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔
𝜃 𝑜 = ω𝑡 + [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] ω
𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃 𝑜
𝜖 𝑠𝑠 = ω𝑡 − 𝜔𝑡 − [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔
𝜖 𝑠𝑠 = − [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔 = [
𝑘𝑘1 + 𝑐
𝑘
− 𝑘1] 𝜔
المعادلة من(3)،
𝑘𝑘1 + 𝑐
𝑘
= 2ζτ → (4)
𝐼
𝐾
= 𝜏2
→ (5)
من( المعادلة4)،
815.32 × 103
𝑘1 + 10.9 × 103
815.32 × 103
= 2 × 0.5 × 0.0729
⇒∴ 𝑘1 = 0.0595𝑠𝑒𝑐](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-125-320.jpg)
![مفاﺟئ دﺧل ﺗﺳﻠيط ﻋﻧد اﻟدورة زمن ]ب:
𝑡 𝑝 =
2𝜋
𝜔 𝑑
،اﻟدورة زمن
𝜔 𝑑 = 𝜔 𝑛√1 − 𝜁2
=
1
𝜏
√1 − 𝜁2
∴ 𝜔 𝑑 =
1
0.0729
√1 − 0.52 = 11.88𝑟𝑎𝑑/𝑠
∴ 𝑡 𝑝 =
2𝜋
11.88
= 0.529𝑠𝑒𝑐
ﻋﻧد اﻟمؤازرة مﺣرك ﻗدرة ]جاﻟﻘﺻوى ﺑاﻟﺳرﻋﺔ اﻟﺣموﻟﺔ ﺗﺣريك:
𝑃 = 𝑇𝜔،اﻟﻘدرة
𝑇 = 𝐶𝜔،اﻟﻌزم
∴ 𝑃 = 𝐶𝜔2
= 10.9 × 103
× 2.6182
= 74707.8𝑊
= 74.71𝐾𝑊
6ﺗﺳاوي ﻛﺗﻠﺔ ﻟه ﻟﻠطائرات مضاد مدﻓﻊ ]7500𝑘𝑔دوراﻧه مﺣور ﺣول ﺗدويمﻲ ﻗطر وﻧﺻف
0.75𝑚طر يﺗﻧاﺳب ًاﻋزم طِّﺳﻠُﺗ ﻟﻠمدﻓﻊ ﺔِّاﻟزاوي اﻟﺣرﻛﺔ ﻓﻲ اﻟﺗﺣﻛم وآﻟيﺔاﻟﺧطأ وﺗفاضل اﻟﺧطأ مﻊ ًاد
واﻟﺧرج اﻟدﺧل ﺑين.مﺣوره ﻓﻲ ﻟزج ﻟﺗﺧميد اﻟمدﻓﻊ يﺗﻌرض ﻛمامﻌامﻠه10 𝐾𝑁. 𝑚( 𝑟𝑎𝑑/𝑠)إذا
اﻟمدﻓﻊ ﺗﺣريك ﻋﻧد اﻟمطﻠوب ﻛانﺗﺳاوي اﻟﺗﻲ اﻟﻘﺻوى اﻟدوران ﺑﺳرﻋﺔ25𝑟𝑒𝑣/𝑚𝑖𝑛ﻻ أن
اﻟﺧرج ﺗﺧﻠف يﺗﺟاوز2°ﺛ األوﻟيﺔ األﺳس من ًامﺑﺗدئ أوﺟد .اﻟدﺧل ﻋناﻟﺧطأ اﺑت𝑘ﺗفاضل وﺛاﺑت
اﻟﺧطأk1.
:اﻟﺣل
ﻟﻠطائرات مضاد مدﻓﻊ،
𝑚 = 7500𝑘𝑔 , 𝑘 𝐺 = 0.75𝑚
𝐼 = 𝑚𝑘 𝐺
2
= 7500 × 0. 752
= 4218.75𝑘𝑔𝑚2
،اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم
𝑇𝛼 ∈ +𝐷𝜖
𝐶 = 10𝐾𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)
Nmax = 25𝑟𝑒𝑣/𝑚𝑖𝑛
∴ ωmax =
25 × 2π
60
= 2.618𝑟𝑎𝑑/𝑠
∈ss= 2° =
2° × π
180
= 0.035𝑟𝑎𝑑
𝑘 =?اﻟﺧطأ ﺛاﺑت
𝑘1 =?اﻟﺧطأ ﺗفاضل ﺛاﺑت](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-126-320.jpg)
![الحركة معادلة:
𝑘(∈ +𝑘1 𝐷 ∈) = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
∈= θi − 𝜃0
𝑘[( 𝜃𝑖 − 𝜃 𝑜) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃 𝑜)] = 𝐶𝐷𝜃0 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 − 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃 𝑜 = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2
𝜃 𝑜
𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃0 + 𝐶𝐷𝜃0 + 𝐼𝐷2
𝜃0
𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝜃0[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐶𝐷 + 𝐼𝐷2]
𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝑘𝜃0 [1 + 𝑘1 𝐷 +
𝐶
𝑘
𝐷 +
𝐼
𝑘
𝐷2
]
𝜃0
𝜃𝑖
=
1 + 𝑘1 𝐷
1 + (𝑘1 +
𝐶
𝑘
) 𝐷 +
𝐼
𝑘
𝐷2
→ (1)
( المعادلة بضرب1:علﻰ نحصل ًاعكسي )
𝜃0 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝐷𝜃0 +
𝐼
𝑘
𝐷2
𝜃0 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖 → (2)
:انحدار لدخل االستجابة
θi = ω𝑡
𝐷θi = ω
الحالة( المستقرةP.I):
θ0 = ω𝑡 + 𝒬
Dθ0 = ω
𝐃 𝟐
𝛉 𝟎 = 𝟎
( المعادلة في بالتعويض2:)
ω𝑡 + 𝒬 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-127-320.jpg)
![𝒬 = 𝑘1 𝜔 − (
𝑘𝑘1 + 𝑐
𝑘
) 𝜔 = [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔
∴ 𝜃0 = ω𝑡 + [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] ω
𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃0
𝜖 𝑠𝑠 = ω𝑡 − 𝜔𝑡 − [𝑘1 (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔
𝜖 𝑠𝑠 = − [𝑘1 − (
𝑘𝑘1 + 𝑐
𝑘
)] 𝜔 = [
𝑘𝑘1 + 𝑐
𝑘
− 𝑘1] 𝜔 → (3)
اﻟمﻌادﻟﺔ من(1:ھﻲ اﻟﺗﻲ اﻟﻘياﺳيﺔ اﻟﺻيغﺔ مﻊ وﺑاﻟﺗﻧاظر )
1
1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2
𝑘𝑘1 + 𝑐
𝑘
= 2ζτ → (4)
1
𝐾
= 𝜏2
→ (5)
المعادلة من( 𝟑):
0.035 = [
𝑘𝑘1 + 10 × 103
𝑘
− 𝑘1] × 2.618
0.01337 =
𝑘𝑘1 + 10 × 103
− 𝑘𝑘1
𝑘
0.01337 =
10 × 103
𝑘
∴ 𝑘 =
10 × 103
0.01337
= 747943.16𝑁. 𝑚/𝑟𝑎𝑑
= 748𝐾𝑁. 𝑚/𝑟𝑎𝑑
من( المعادلة5:)
τ = √
𝐼
𝐾
= √
4218.75
748 × 103 = 0.0751𝑠𝑒𝑐/𝑟𝑎𝑑
𝜔 𝑑 = 𝜔 𝑛√1 − 𝜁2
2.618 =
1
0.075
√1 − 𝜁2
⇒∴ ζ = 0.98
( المعادلة من4:)
748 × 103
𝑘1 + 10 × 103
748 × 103
= 2 × 0.98 × 0.0751](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-128-320.jpg)
![∴ 𝑘1 = 0.134𝑠𝑒𝑐
7]ﻋزم اﻟﺣموﻟﺔ ﺑاﻋﺗﺑار رادار ھوائﻲ ﺗوﺟيه ﻓﻲ ﺗﺣﻛم آلﻟيﺔ اﻟمميزة اﻟمﻌادﻟﺔ أوﺟداﻟﻘﺻور
اﻟﮭوائﻲ ﻟﺑرج اﻟذاﺗﻲاﻟﺑرج ﻛراﺳﻲ ﻓﻲ ﻟزج ﺗﺧميد مﻊ،ﻟﺗﺻﺣيح اﻟﺣموﻟﺔ ﻋﻠﻰ طَّﻠاﻟمﺳ واﻟﻌزماﻟوضﻊ
إضاﻓﺔ أﺛر ھو ما .واﻟفﻌﻠﻲ اﻟمرﻏوب اﻟزاوي اﻟوضﻊ ﺑين اﻟفرق مﻊ ًاطرد يﺗﻧاﺳب.اﻟفرق ﺗفاضل
ﻟﻠﺣموﻟﺔ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم0.2𝑘𝑔𝑚2
اﻟﺗﺧميد ومﻌامل7𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)وﻋزماﻟﺗﺻﺣيح
رُِّوﻓيﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔدواره ﻗﺻور ﻋزم12 × 10−6
𝑘𝑔𝑚2
ﺑين اﻟﺗروس وﺻﻧدوق
اﻟمﺣركﺑﻧﺳﺑﺔ اﻟﺳرﻋﺔ ضُِّﺧفي واﻟﺣموﻟﺔ100:1،اآلﺗﻲ أوﺟد:
اﻹﺳﺗﻘراري اﻟﺗﺧﻠف ﻛان إذا واﻟفﻌﻠﻲ اﻟمرﻏوب ﺑين ﻓرق زاويﺔ درﺟﺔ ﻟﻛل اﻟمﺣرك ﻋزم ]أ
اﻟمﺳموح0.25°ﺑﺳرﻋﺔ اﻟﺣموﻟﺔ دوران ﻋﻧد30𝑟𝑒𝑣/𝑚𝑖𝑛.
إﻟﻰ األﻗﺻﻰ اﻟﺗﺟاوز ﻟﺣد اﻟفرق ﺗفاضل ﺛاﺑت ]ب20%.
اﻟﺣل:
𝑇 ∝ { 𝜖 + 𝑘1 𝐷𝜖}
𝑇 = 𝑘{ 𝜖 + 𝑘1 𝐷𝜖}
= 𝑘[( 𝜃𝑖 − 𝜃0) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃0)]
𝐼 = 0.2𝑘𝑔𝑚2
∈ 𝑠𝑠= 𝜃𝑖 − 𝜃0 = 0.25° =
0.25° × 𝜋
180
𝑟𝑎𝑑
𝜔𝑖 = 30𝑟𝑒𝑣/ min =
30 × 2𝜋
60
= 𝜋𝑟𝑎𝑑/𝑠
𝑐 = 7𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)
𝐼 𝑚 = 12 × 10−6
𝑘𝑔𝑚2
𝐺𝑅 = 100/1اﻟﺗروس ﻧﺳﺑﺔ
]أ𝑇 𝑚/𝜖 𝑠𝑠 =?
]بP. O = 0.2 ﻋﻧدما 𝑘1 =?](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-129-320.jpg)
![[ 𝑇 𝑚 − 𝐼 𝑚 𝐷2
𝜃 𝑚] × 𝐺𝑅 = 𝑘{( 𝜃𝑖 − 𝜃0) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃0)}
= 𝐼𝐷2
𝜃0 + 𝐶𝐷𝜃0
𝑘𝜃𝑖 − 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃0 = 𝐼𝐷2
𝜃0 + 𝐶𝐷𝜃0
𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃0 + 𝐼𝐷2
𝜃0 + 𝐶𝐷𝜃0
𝑘𝜃𝑖[1 + 𝑘1 𝐷] = 𝜃0[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐼𝐷2
+ 𝐶𝐷]
𝜃𝑖[1 + 𝑘1 𝐷] = 𝜃0 [1 + 𝑘1 𝐷 +
𝐼
𝐾
𝐷2
+
𝐶
𝐾
𝐷]
𝜃0
𝜃𝐼
=
1+𝑘1 𝐷
1+𝑘1 𝐷+
𝐼
𝐾
𝐷2+
𝐶
𝐾
𝐷
=
1+𝑘1 𝐷
1+𝑘1 𝐷+
𝐶
𝐾
𝐷+
𝐼
𝐾
𝐷2
𝜃0
𝜃𝐼
=
1 + 𝑘1 𝐷
1 + (𝑘1 +
𝐶
𝐾
) 𝐷 +
𝐼
𝐾
𝐷2
𝜃0
𝜃𝐼
=
1 + 𝑘1 𝐷
1 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝐷 +
𝐼
𝐾
𝐷2
→ (1)
ﺗﻛون اﻟﺗﻲ:اﻟمﻌياريﺔ ﻟﻠﺻيغﺔ مﻧاظرة
1
1 + 2ζτD + τ2D2
( ﻟﻠمﻌادﻟﺔ اﻟﻌﻛﺳﻲ ﺑاﻟضرب1ﻋﻠﻰ ﻧﺣﺻل )،
θ0 + (
𝑘𝑘1 + 𝑐
𝑘
) 𝐷𝜃0 +
𝐼
𝐾
𝐷2
𝜃0 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖
مرﻛب ﺗأﺧر اﻧﺗﻘاﻟﮭا أو ﺗﺣويﻠﮭا ﻋامل اﻟﺗﻲ اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ
:االنحدار لدخل االستجابة
θi = ω𝑡
𝐷θi = ω
( المستقرة الحالةP.I):
θ0 = ω𝑡 + 𝒬
Dθ0 = ω
D2
θ0 = 0
𝜔𝑡 + 𝒬 + (
𝑘𝑘1 + 𝐶
𝑘
) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔
𝒬 = 𝑘1 𝜔 − (
𝑘𝑘1 + 𝐶
𝑘
) 𝜔
𝒬 = ω [𝑘1 − (
𝑘𝑘1 + 𝐶
𝑘
)]
𝒬 = ω [(
𝑘𝑘1 − 𝑘𝑘1 − 𝐶
𝑘
)]](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-130-320.jpg)

![2𝜁𝜏 =
𝑘𝑘1 + 𝑐
𝑘
→ (2)
،ًاأيض𝜏2
𝐷2
=
𝐼
𝐾
𝐷2
∴ 𝜏2
=
𝐼
𝐾
∴ τ = √
𝐼
𝐾
= √
0.2
5040
= 6.3 × 10−3
𝑠𝑒𝑐/𝑟𝑎𝑑
( المعالة من2)،
2 × 0.456 × 6.3 × 10−3
=
5040𝑘1 + 7
5040
∴ 𝑘1 = 4.36 × 10−3
𝑠𝑒𝑐
2.6بَّﻛرُماﻟ رُﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ اضاﻓيﺔ مﺳائل:
1اﻟﺧطأ ﺗفاضل زائد طردي ﺗﺣﻛم ﺗﺳﺗﺧدم اﻟﺑﻌد ﻋﻠﻰ من اﻟوضﻊ ﻓﻲ ﺗﺣﻛم مﻧظومﺔ ]ﻟﺗﺣريك
اﻟذاﺗﻲ ﻗﺻورھا ﻋزم ﺣموﻟﺔ9 𝑘𝑔𝑚2
مﻌامﻠه ﻟزج ﺗﺧميد مﻊ60 𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)ﺛاﺑت ﻛان إذا
اﻟطردي اﻟﺗﺣﻛم4500 𝑁. 𝑚/𝑟𝑎𝑑اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت ﻓﻲ ًامضروﺑ اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت
يﺳاوي120𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،ﺑﺳرﻋﺔ اﻟدﺧل ﻋمود دوران ﻋﻧد اﻹﺳﺗﻘراري اﻟﺧطأ أوﺟد
2𝑟𝑎𝑑/𝑠،مئويﺔ مﺟاوزة أﻗﺻﻰ ﻛذﻟك أوﺟدﻋن ﻋﺑارة اﻟدﺧل ﻛان إذاداﻟﺔأﺣاديﺔ ﺧطوة.
𝑨𝒏𝒔. (𝟐𝟏. 𝟏% ؛ 𝟎. 𝟎𝟐𝟔𝟕 𝒓𝒂𝒅)
2ﺑﻌد ﻋﻠﻰ من اﻟوضﻊ ﻓﻲ ﺗﺣﻛم ﺟﮭاز ]،ﺣموﻟﺔ ك ُِّﺣري أن مطﻠوبذاﺗﻲ ﻗﺻور ﻋزم ذاتمﻘداره
2.95𝑘𝑔𝑚2
اﻟذاﺗﻲ اﻟﻘﺻور وﻋزماﻟمؤازرة ﻟمﺣرك3.16 × 103
𝑘𝑔𝑚2
،اﻟﺗﺧميد ومﻌامل
ﻋﻠﻰاﻟمﺣرك ﻋمود1.360𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)اﻟمﺣرك وﺳرﻋﺔ ،20مرةاﻟﺣموﻟﺔ ﺳرﻋﺔ.ﻛان إذا
ﺣدود ﻓﻲ اﻟﺗﺧﻠف0.5°اﻟﺳرﻋﺔ ﺗﻛون ﻋﻧدما25𝑟𝑒𝑣/𝑚𝑖𝑛اﻟدﺧل ﺗغيير ﻋﻧد ﺗﺟاوز يﺣدث وﻻ
ﻓﺟأة.اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت أوﺟد..ﻟﻠمﻧظومﺔ اﻟﺗﺧميد مﻌامل أوﺟد
𝑨𝒏𝒔. (𝟏𝟔𝟑𝑲𝑵.
𝒎
𝒓𝒂𝒅
، 𝟎. 𝟎𝟎𝟔𝟖𝟒𝒔 ، 𝟏𝟔𝟔𝟎𝑵𝒎/( 𝒓𝒂𝒅/𝒔))
3اﻟﺳرﻋﺔ ﻓﻲ ﺗﺣﻛم مﻧظومﺔ ﻓﻲ ]،اﻟﻌزم يﺗزايد𝑇dاﻟﺳرﻋﺔ ﻓرق مﻊ ًاطرد اﻟﺣموﻟﺔ ﻋﻠﻰ اﻟمﺳﻠط
واﻟﺧرج اﻟدﺧل ﺑين𝜔eﺑمﻘدار0.01𝑁𝑚/( 𝑟𝑎𝑑/𝑠)،ﻗﺻور ﻋزم ذات ﺣداﻓﺔ ﻋن ﻋﺑارة اﻟﺣموﻟﺔ
ذاﺗﻲ0.5𝑘𝑔𝑚2
مﻌامﻠه ﻟﺗﺧميد ض َّومﻌر0.04𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،:اآلﺗﻲ أوﺟد
اﻟﻌال ]أﺑين ﻗﺔωeو 𝑇𝑑اﻟﺣموﻟﺔ دوران ﻋﻧدﺑﺳرﻋﺔ150 𝑟𝑎𝑑/𝑠.اﻟﺧرج مﻊ اﻟدﺧل ﺗﺳاوي ﻋﻧد
اﻟﺣموﻟﺔ دوران ﻋﻧد ﻟﻠمﻧظومﺔ اﻟﺳرﻋﺔ ﺛاﺑت ]بﺑﺳرﻋﺔ150 𝑟𝑎𝑑/𝑠مﻊ اﻟدﺧل ﺗﺳاوي ﻋﻧد
.اﻟﺧرج
مﻘدارھا ﻗيمﺔ إﻟﻰ اﻟدﺧل رﻓﻊ ﻋﻧد اﻟﻧﮭائيﺔ اﻻﺳﺗﻘراريﺔ اﻟﺳرﻋﺔ ]ج180 𝑟𝑎𝑑/𝑠.
4اﻟﻛﺗﻠﺔ أدﻧاه َّﺣﺔضاﻟمو اﻟمﻧظومﺔ ﻓﻲ ]𝑚مﻘدارھا2𝑘𝑔اﻟياي وﻛزازة𝑘ﺗﺳاوي800𝑁/𝑚
اﻟﺗﺧميد ومﻌامل𝐶يﺳاوي15𝑁/( 𝑚/𝑠)ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال داﻟﺔ أوﺟد،:أوﺟد ﺛم](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-132-320.jpg)
![اﻟدﺧل يﻛون ﻋﻧدما اﻻﺳﺗﺟاﺑﺔ ]أ𝑥iأﺣاديﺔ ﺧطوة داﻟﺔ،ﻟﻠمﺟاوزة اﻟﻘﺻوى اﻟمئويﺔ اﻟﻧﺳﺑﺔ ھﻲ وما
ھذه ﻓﻲ.اﻟﺣاﻟﺔ
ﻛان إذا اﻻﺳﺗﻘراريﺔ اﻻﺳﺗﺟاﺑﺔ ]بxi = 0.01 sin 15𝑡.
5اﻧﺣدار ﻟداﻟﺔ أدﻧاه اﻟﻌﻧﺻر اﺳﺗﺟاﺑﺔ أوﺟد ]{ 𝑟𝑎𝑚𝑝 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛}اﻟمﺧمد ﻓائدة ًامﺑيﻧ𝑐1.
6ﺛاﺑت طردي ﺗﺣﻛم ﺛاﺑت ذات مﺧمد مؤازرة آﻟيﺔ ]𝑘ﺗﺧميد ومﻌامل𝑐.اﻟﺧطأ أن ُالﺣظي
ﺑه اﻟمﺳموح أضﻌاف ﻋﺷرة ُﻌادلي اﻧﺣدار دﺧل ﺗﺳﻠيط ﻋﻧد اﻻﺳﺗﻘراري.ﺑﺗغيير ذﻟك ﺗﺻﺣيح ﺗم
اﻟﺛاﺑت𝑘ﺗغيير دون اﻟﺗﺧميد ﻧﺳﺑﺔ ﺗظل ﺑﺣيث اﻟﺧطأ ﺑﺗفاضل مُّﻛﺗﺣ وإضاﻓﺔ.اﻟﺗﺣﻛم ﺛاﺑت أوﺟد
اﻟطردي.اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟﺟديد
𝑨𝒏𝒔 ∙ (𝟏𝟎𝒌، 𝟎. 𝟐𝟏𝟔
𝒄
𝒌
)
7ﺑﺗغذيﺔ ﺗﺣﻛم ﻧظام ]أدﻧاه اﻟﺷﻛل ﻓﻲ ﺗوضيﺣه يﺗم اﺷﺗﻘاﻗيﺔ ﺧﻠفيﺔ وﺗغذيﺔ وﺣدة ذات ﺧﻠفيﺔ.إذا
ًاﺻفر ﺗﺳاوي اﻻﺷﺗﻘاﻗيﺔ اﻟﺧﻠفيﺔ أو اﻟمرﺗدة اﻟﺗغذيﺔ ﻛاﻧت.اﻹﺧماد أو اﻟمضاءﻟﺔ ﻧﺳﺑﺔ ِّدﺣدواﻟﺗردد
ﻟدﺧل اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ وﺧطأ ﻟﻠﻧظام اﻟطﺑيﻌﻲوﺣدة ذو اﻧﺣدار.مضاءﻟﺔ ﻧﺳﺑﺔ ﻋﻠﻰ اﻟﺣﺻول يﺗم
مﻘدارھا0.8اﻟﺛاﺑت ﻗيمﺔ ِّدﺣد .اﻻﺷﺗﻘاﻗيﺔ اﻟﺧﻠفيﺔ اﻟﺗغذيﺔ ﺑضﺑط𝑘اﻟﺷرط ھذا ﻟﺗﺣﻘيق،اﻟزيادة ِّروﻗد
.وﺣدة ذو اﻧﺣدار ﻟدﺧل ﻟﻠﻧظام اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ ﻓﻲ
𝑨𝒏𝒔(𝝃 = 𝟎. 𝟓، 𝝎 𝒏 = 𝟒و 𝟎. 𝟐𝟓 ، 𝒌 = 𝟎. 𝟏𝟓و 𝟎. 𝟒)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-133-320.jpg)
![8ﺑالﺳﺗيك ﺳﺑاﻛﺔ ﻹﺟراء اﻟﺣرارة درﺟﺔ ]{ 𝑃𝑙𝑎𝑠𝑡𝑖𝑐 𝑚𝑜𝑢𝑙𝑑𝑖𝑛𝑔 𝑝𝑟𝑜𝑐𝑒𝑠𝑠}اﻟﺗﺣﻛم يﺗم
ﺑﺗﺳﺧين ﻓيﮭا)أدﻧاه (اﻟﺷﻛل اﻟﺑالﺳﺗيﻛيﺔ ﺑاﻟﺷﺣﻧﺔ اﻟمﺣيط اﻟﺗﺟويف.مﻛاﻓئﺔ ﺣرارة يمد اﻟﺗﻧاﺳﺑﻲ اﻟمﺗﺣﻛم
ﻟـ𝐵ﺑاﻟـ اﻟﺣرارة درﺟﺔ ﺧطأ ﻓﻲ مضروﺑﺔ( 𝐾)اﻟﺗﺟويف ﻋﻧد.ﺑمﻘدار اﻟﺗﺟويف ﺣرارة درﺟﺔ ﺗﺗغير
2 × 10−6
𝐾𝐽−1
ﻟﻠﺣرااﻟﺣرارة درﺟﺔ .اﻟمﺳﺗﺧﻠﺻﺔ أو اﻟمﻛﺗﺳﺑﺔ رة𝐶ﺗﺗغير اﻟﺑالﺳﺗيﻛيﺔ ﻟﻠﺷﺣﻧﺔ
ﺑمﻘدار0.004 ( 𝐾𝑠−1)/𝐾ﺣرارة درﺟﺔ ﻓرق .اﻟﺗﺟويف ﺣرارة درﺟﺔ ﻓرق ﻓﻲ مضروﺑﺔ
.ًاﺛاﺑﺗ اﻓﺗراضه يمﻛن اﻟﺗﺟويف
اﻟمﺗﺣﻛم ﻛﺳب ﺣدد ]أ𝐵مﻘدارھا مضاءﻟﺔ ﺑﻧﺳﺑﺔ ﺧطوة ﻻﺳﺗﺟاﺑﺔ0.7.
ﺳرﻋ زيادة يمﻛن ﻛيف وضح ]بﺔ.اﻟمضاءﻟﺔ درﺟﺔ ﻧفس ﻋﻠﻰ اﻟمﺣاﻓظﺔ يﺗم ﺑيﻧما اﻻﺳﺗﺟاﺑﺔ
𝑨𝒏𝒔( 𝟏. 𝟎𝟐 × 𝟏𝟎 𝟑
𝑱/𝒔𝑲)
9دوارة ﻛﺗﻠﺔ ﻓﻲ ﻟﻠﺗﺣﻛم ﺗﺳﺗﺧدم ﻛﮭرﺑائيﺔ مؤازرة ﻓﻲ ]،يﺳاوي اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم
100𝑘𝑔𝑚2
يﺳاوي اﻟمﺣرك ﻋزم ،1600𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑اﻟمضاءﻟﺔ وﻧﺳﺑﺔ اﻟمﺣاذاة منζﺗﺳاوي
0.5.ووضﻊ اﻟﺧرج ﻋمود وضﻊ ﺑين اﻻﻧﺗﻘال داﻟﺔ أوﺟد وﺑاﻟﺗاﻟﻲ اﻟﻧظام ﻟﮭذا اﻟﻛﺗﻠﻲ اﻟمﺧطط رِّطو
.اﻟدﺧل ﺗﺣﻛم ﻋﺟﻠﺔ](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-134-320.jpg)
![10طائرة ميل درﺟﺔ ﺗﺣﻛم ﻟﻧظام ھواء ﻧفق من ًاﺟزء ح ُِّوضي أدﻧاه اﻟﺷﻛل ﻓﻲ اﻟمﺧطط ].زاويﺔ
اﻟميل𝜃0ھو اﻟطيار ودﺧل𝜃i،ھﻲ اﻟراﺳيﺔ اﻟﺳرﻋﺔ إﺷارة𝑉v،ﺑيﻧما𝜃e.اﻟﺻﻌود زاويﺔ ھﻲ
اﻟمﺧطط ﺑﺗﺧفيض،.اﻟمغﻠﻘﺔ اﻟﺣﻠﻘﺔ اﻧﺗﻘال داﻟﺔ ﺣدد
11اﻟدﺣراج اﻟمﺣور ﺣول ذاﺗﻲ ﻗﺻور ﻋزم ﻟه اﻻﺧﺗﺑار ﺗﺣت ﻟﺳفيﻧﺔ ﻧموذج ]{ 𝑟𝑜𝑙𝑙 𝑎𝑥𝑖𝑠}
مﻘداره1𝑘𝑔𝑚2
.)(اﻟدﺣرﺟﺔ اﻟدرﻓﻠﺔ ﻋزم{ 𝑟𝑜𝑙𝑙𝑖𝑛𝑔 𝑚𝑜𝑚𝑒𝑛𝑡}ﺳرﻋﺔ ﺑمﻌدل ﺗوﻟيده يﺗم اﻟذي
𝑟 𝑟𝑎𝑑𝑠−1ًاﺳاﻟﺑ يﻛونi. e. )وﺑمﻘدار )أدﻧاه اﻟﺷﻛل أﻧظر اﻟﺧارج إﻟﻰ0.8𝑟 𝑁. 𝑚.اﻻﺳﺗﻘرار
ﻟﻠﺳفيﻧﺔ اﻟطﺑيﻌﻲمﻘداره اﺳﺗرﺟاع ﻋزم بُِّﺳﺑي2𝜙𝑁. 𝑚ﺑمﻘدار اﻟﺳفيﻧﺔ ﺗﺗدﺣرج ﻋﻧدما يﻌملϕ𝑟.
ﺗرﻛيب ﻗرار أﺧذ َّمﺗ ﻟﻘداﻟدﺣرﺟﺔ ﻓﻲ ﺗﺣﻛم زﻋاﻧف،مﻘداره موﺟب ﻋزم ﺗﻧﺗج4δ𝑁. 𝑚اﺗﺟاه (ﻓﻲ
)األمام ﺟﮭﺔ من ﺑاﻟﻧظر اﻟﺳاﻋﺔ ﻋﻘارب دوران،ﺣيثδاﻻﻧﺣراف زاويﺔ ھﻲ،ﺗﺣﻛم ﻧظام أدار إذا
ﻟﻠﻘاﻧون ًاطﺑﻘ اﻟزﻋاﻧف اﻟدﺣرﺟﺔ:
δ = 𝑎𝜙 + 𝑏
𝑑𝜙
𝑑𝑡
+ 𝐶𝑟
أوﺟد𝑐، 𝑏، 𝑎:ﺑﺣيث
مﻌﺗدﻟﺔ اﻟﺳفيﻧﺔ ﺗﺑﻘﻰ ]أ{upright}.مﺳﺗﻘر ﺗدوير ﺧالل مدﺣرﺟﺔ ﻏير
مﻘداره طﺑيﻌﻲ ﺗردد ﻟﻠدﺣرﺟﺔ اﻟﻌاﺑرة اﻻﺳﺗﺟاﺑات ﺗمﺗﻠك ]ب2 𝑟𝑎𝑑𝑠−1
مﻘدارھا مضاءﻟﺔ وﻧﺳﺑﺔ
0.5.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-135-320.jpg)
![12يِّاﻟزاو اﻟوضﻊ ﻓﻲ ﻟﻠﺗﺣﻛم ﺗﺻميمﮭا يﺗم مؤازرة آﻟيﺔ ]دوارة ﻟﻛﺗﻠﺔﺑواﺳطﺔ اﺳﺗﻘرارھا يﺗم
ﻟﻠﺗﺳارع مرﺗدة ﺗغذيﺔ.اﻟﻘﺻور ﻋزم يﻛونﻟﻠﻧظام اﻟذاﺗﻲ10−5
𝑘𝑔𝑚2
واﻟﻌزم ،اﻟﻠزج اﻻﺣﺗﻛاﻛﻲ
ﻟﻛل𝑟𝑎𝑑يﺳاوي ﺛاﻧيﺔ ﻟﻛل10−4
𝑁. 𝑚اﻟمﺣرك وﻋزم𝑇mﺑـ إﻋطاؤه يﺗم:
Tm = 4 × 10−3[ 𝜃e + ks2
θ0] 𝑁. 𝑚
اﻟﺗﺣﻛم مﻌادﻟه واﺷﺗق ﻟﻠﻧظام اﻟﻛﺗﻠﻲ اﻟمﺧطط ارﺳم.ﻗيمﺔ ِّدﺣد ﺑاﻟﺗاﻟﻲ𝑘اﻟمضاءﻟﺔ ﺳﺗﺟﻌل اﻟﺗﻲ
ﺣرﺟﺔ.مﻘدارھا دﺧل ﻹﺷارة اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطا ھو ما1.26𝑟𝑎𝑑𝑠−1
.
𝑨𝒏𝒔. ( 𝟐. 𝟑𝟒 × 𝟏𝟎−𝟑
، 𝟏𝟒 𝐫𝐚𝐝)
13ذاﺗﻲ ﺑﻘﺻور ﺗﺣﻛم ﻧظام ]160kgm2
ﻓﻘط ﻟزﺟﺔ اﺣﺗﻛاك ﺑمضاءﻟﺔ ﺗﺷغيﻠه يﺗم،مﻌامﻠﮭا ﻗيمﺔ
640𝑁. 𝑚𝑟𝑎𝑑 −1
𝑠مﻘدارھا مضاءﻟﺔ ﻧﺳﺑﺔ يمﺗﻠك اﻟﻧظام ﻛان إذا0.4وﺧطأ اﻟطﺑيﻌﻲ اﻟﺗردد ِّدﺣد
مﻘداره اﻧﺣدار داﻟﺔ دﺧل إﻟﻲ ﺗﻌريضه يﺗم ﻋﻧدما اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ10 𝑟𝑒𝑣/𝑚𝑖𝑛.
أرﺑﻌﺔ إﻟﻲ اﻟطﺑيﻌﻲ اﻟﺗردد ُزادي ﺑﺣيث اﻟﻛﺳب ضﺑط ويﺗم ﻟﻠﻧظام ﺗفاضﻠﻲ ﺧطأ ﺗﺣﻛم إضاﻓﺔ يﺗم
األﺻﻠيﺔ ﻗيمﺔ إضﻌافﻗيمﺗﮭا ﻋﻧد اﻟمضاءﻟﺔ ﻧﺳﺑﺔ ﻋﻠﻲ اﻟمﺣاﻓظﺔ يﺗم ﺑيﻧمااألﺻﻠيﺔ0.4ﺧطأ ِّدﺣد
اﻟﺣاﻟﺔاﻟﺗفاضﻠﻲ اﻟزمن ﺛاﺑت ﻗيمﺔ وﺣدد اﻻﻧﺣدار دﺧل ﻟﻧفس اﻟﺟديد اﻟمﺳﺗﻘرةﻓﻲ إدﺧاﻟه يﺗم اﻟذي
.اﻟﻧظام
𝑨𝒏𝒔 ∙ ( 𝟓 𝒓𝒂𝒅𝒔−𝟏
، 𝟎. 𝟏𝟔𝟖 𝒓𝒂𝒅، 𝟎. 𝟎𝟏𝟎𝟓𝒓𝒂𝒅، 𝟎. 𝟎𝟑𝒔)
14اﺧﺗﺑار ﺟﮭاز ﻋﻠﻰ ﻟﺣداﻓﺔ اﻟزاوي اﻟوضﻊ ]{ 𝑇𝑒𝑠𝑡 𝑟𝑖𝑔}ﺗﺣﻛم ﻧظام ﺑواﺳطﺔ ﻓيه اﻟﺗﺣﻛم يﺗم
أوﺗوماﺗيﻛﻲدﺧل راﻓﻌﺔ ﺣرﻛﺔ ﻟيﺗﺑﻊ ﻟﻠﺧطأ لِّفﻌُم اﻟﺣﻠﻘﺔ مغﻠق.ﻓﻲ اﻟراﻓﻌﺔ ﻋﻠﻰ اﻟمﺣاﻓظﺔ يﺗم
ﺧالل ﺟيﺑيﺔ ﺗأرﺟﺣات±60°زاوي ﺑﺗردد𝜔 = 2𝑟𝑎𝑑/𝑠.ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم
يﺳاوي150𝑘𝑔𝑚2
ﺗﻛون اﻟﺗﺣﻛم ازة َّوﻛز2400𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑.اﻟمﺣاذاة ﻋدم من
اﻻﺣﺗﻛاﻛﻲ اﻟﻌزم أﺣﺳبﺣرﺟﺔ مضاءﻟﺔ ﺑاﻓﺗراض .ﺣرﺟﺔ مضاءﻟﺔ ﻹﻧﺗاج اﻟمطﻠوب اﻟﻠزج،
.اﻟﺗﺣﻛم وراﻓﻌﺔ اﻟﺣداﻓﺔ ﺑين اﻟزمن وﺗأﺧر ﻟﻠﺣداﻓﺔ اﻟﺗأرﺟح مطال أﺣﺳب
𝑨𝒏𝒔( 𝟏𝟐𝟎𝟎𝑵. 𝒎𝒓𝒂𝒅−𝟏
𝒔 ، 𝟒𝟖° ، 𝟎. 𝟒𝟔𝟒𝒔)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-136-320.jpg)
![الثالث الفصل
التحكم نظم استقرار من التحقق
3.1اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط رﺳم{ 𝑷𝒍𝒐𝒕𝒕𝒊𝒏𝒈 𝒓𝒐𝒐𝒕 𝒍𝒐𝒄𝒊}.
3.1.1مرﺗدة ﺗغذيﺔ وﺣدة ذات مغﻠﻘﺔ مﻧظومﺔ
{ 𝑪𝒍𝒐𝒔𝒆𝒅 𝒍𝒐𝒐𝒑 𝒘𝒊𝒕𝒉 𝒖𝒏𝒊𝒕𝒚 𝒇𝒆𝒆𝒅 𝒃𝒂𝒄𝒌}.
( اﻟﺷﻛل3.1مغﻠﻘﺔ مﻧظومﺔ ح ُِّوضي أدﻧاه )ﺧﻠفيﺔ ﺗغذيﺔ وﺣدة ذات
( رﻗم ﺷﻛل3.1ﺧﻠفيﺔ ﺗغذيﺔ وﺣدة ذات اﻟﺣﻠﻘﺔ مغﻠﻘﺔ مﻧظومﺔ )
األمامﻲ اﻟمﺳار اﻧﺗﻘال ﻋامل𝐺( 𝐷) = { 𝐹𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑜𝑝𝑒𝑟𝑎𝑡𝑜𝑟}
اﻟمﻧظومﺔ اﻧﺗﻘال ﻋامل𝑇( 𝐷) = { 𝑆𝑦𝑠𝑡𝑒𝑚 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑜𝑝𝑒𝑟𝑎𝑡𝑜𝑟}
𝐺( 𝐷) =
𝜃 𝑜
∈
, 𝑇( 𝐷) =
𝜃 𝑜
𝜃𝑖
𝐺( 𝐷) =
𝜃 𝑜
𝜃𝑖 − 𝜃 𝑜
=
𝜃 𝑜
∈
𝜃 𝑜 = 𝐺( 𝐷) ∈
أن وﺑما،
∈= 𝜃𝑖 − 𝜃 𝑜
∴ θ0 = 𝐺( 𝐷)(θi − θ0)
θ0 = 𝐺( 𝐷) 𝜃𝐼 − 𝐺( 𝐷) 𝜃0
θ0 + 𝐺( 𝐷) 𝜃0 = 𝐺( 𝐷) 𝜃𝑖
θ0[1 + 𝐺( 𝐷)] = 𝐺( 𝐷) 𝜃𝑖](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-137-320.jpg)
![∴
θ0
θi
=
G(D)
1 + G(D)
= 𝑇( 𝐷) → (3.1)
اﺳﺗﺑدل𝐷ﺑــ𝑆:ﺣيث𝑆 = 𝛼 + 𝑗𝜔
( المعادلة عن التعبير يمكن بالتالي3.1كاآلتي ):
∴ 𝑇( 𝑆) =
𝐺( 𝑆)
1 + 𝐺( 𝑆)
→ (3.2)
)األﺳﻲ (ﻟﻠﺗأﺧر𝑇( 𝑆) =
1
1+𝜏𝑆
)اﻟمرﻛب (ﻟﻠﺗأﺧر𝑇( 𝑠) =
1
1+2𝜁𝜏𝑆+𝜏2 𝑠2
3.1.2(:اﻻﻧﺗﻘال ﻟداﻟﺔ اﻟﻌام اﻟﺷﻛل( 𝐺𝑒𝑛𝑟𝑎𝑙 𝐹𝑜𝑟𝑚 𝑜𝑓 𝑇𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛)
𝑇( 𝑠) =
𝑁( 𝑠)
𝐷( 𝑠)
→ (3.3)
ﺣيث𝑁( 𝑠)اﻟﺣدود مﺗﻌددة ھﻲ{ 𝑃𝑜𝑙𝑦𝑛𝑜𝑚𝑖𝑎𝑙}ﻓﻲ𝑠ا ﻓﻲﻟﺑﺳط{ 𝑁𝑢𝑚𝑒𝑟𝑎𝑡𝑜𝑟} 𝐷( 𝑠)،
𝐷( 𝑠)ﻓﻲ اﻟﺣدود مﺗﻌددة ھﻲ𝑠اﻟمﻘام ﻓﻲ{ 𝐷𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑡𝑜𝑟}( اﻟمﻌادﻟﺔ ﻛﺗاﺑﺔ يمﻛن ﺑاﻟﺗاﻟﻲ3.3)
اﻟﺗاﻟﻲ اﻟﻧﺣو ﻋﻠﻰ:
𝑇( 𝑠) =
𝑁( 𝑆)
𝐷( 𝑆)
=
𝑎 𝑛( 𝑠 − 𝑠1)( 𝑠 − 𝑠2) … … … … … … … … ( 𝑠 − 𝑠 𝑛)
𝑏 𝑚( 𝑠 − 𝑠 𝑎)( 𝑠 − 𝑠 𝑏) … … … … … … . . . . ( 𝑠 − 𝑠 𝑚)
→ (3.4)
ﺣيث𝑠1, 𝑠2, … . . , 𝑠 𝑛وھﻲ اﻟﺑﺳط ﺟذور ھﻲﻗيم𝑠ﺗﺟﻌل اﻟﺗﻲ𝑇( 𝑠) = 0ﺑأﺻفار ﺗﺳمﻰ و
اﻻﻧﺗﻘال داﻟﺔ{ 𝑍𝑒𝑟𝑜𝑠 𝑜𝑓 𝑡ℎ𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛}اﻟمﺳﺗوى ﻓﻲ وﺗمﺛلs{ 𝑠 −
𝑝𝑙𝑎𝑛𝑒}ﺻغيرة ﺑدوائر.َّوأن𝑠 𝑎, 𝑠 𝑏, … . . , 𝑠 𝑚ﻗيم وھﻲ اﻟمﻘام ﺟذور ھﻲsﺗﺟﻌل اﻟﺗﻲT( 𝑠) =
∞اﻻﻧﺗﻘال داﻟﺔ ﺑأﻗطاب ﺗﺳمﻰ وھﻲ
{Poles of the transfer function}اﻟمﺳﺗوى ﻓﻲ وﺗمﺛلs −ﺑﻌالمﺔ𝑋.
:ﺣيث
≡ 𝑚األﻗطاب ﻋدد
≡ n.األﺻفار ﻋدد
≡ 𝑚 − 𝑛 → (3.5)اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ
3.1.3ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل ﻟرﺳم اﻟﻌامﺔ اﻻﺣﻛام:(General rules for plotting
root loci)
1:اﻟﺻفر من يﻘﺗرب أو اﻟﻘطب ﻋن يﺑﺗﻌد ﻋﻧدما ﻟﻠﺟذر اﻟﮭﻧدﺳﻲ اﻟمﺣل اﺗﺟاه ]
{ 𝑫𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒓𝒐𝒐𝒕 𝒍𝒐𝒄𝒖𝒔 𝒂𝒔 𝒊𝒕 𝒍𝒆𝒂𝒗𝒆𝒔 𝒂 𝒑𝒐𝒍𝒆 𝒐𝒓 𝒂𝒑𝒑𝒓𝒐𝒂𝒄𝒉𝒆𝒔 𝒂𝒛𝒆𝒓𝒐}
𝛿a = (δ1 + δ2 + ⋯ ) − (δb + δc + ⋯ ) ± 180° → (3.6)ﻋن اﻻﺑﺗﻌاد زاويﺔ
اﻟﻘطب
δ1 = (δa + δb + ⋯ ) − (δ2 + δ3 + ⋯ ) ± 180° → (3.7)من اﻻﻗﺗراب زاويﺔ
.اﻟﺻفر
2:اﻟمﻘارﺑﺔ اﻟﺧطوط أﺗﺟاه أو ﻧﮭايﺔ ﻻ ما ﻓﻲ اﻟﺻفر اﺗﺟاه ]](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-138-320.jpg)
![{ 𝑫𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒛𝒆𝒓𝒐 𝒂𝒕 𝒊𝒏𝒇𝒊𝒏𝒊𝒕𝒚 𝒐𝒓 𝒅𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒂𝒔𝒚𝒎𝒑𝒕𝒐𝒕𝒆𝒔}
=
180
𝑚−𝑛
(1 + 2𝐿) → (3.8)اﻟﻌﻧﺻر اﺗﺟاه أو اﻟمﻘارﺑﺔ اﻟﺧطوط اﺗﺟاهاﻟالﻧﮭائﻲ
3اﻟﺣﻘيﻘﻲ اﻟمﺣور مﻊ اﻟمﻘارﺑﺔ اﻟﺧطوط ﺗﻘاطﻊ ]:
{ 𝑰𝒏𝒕𝒆𝒓𝒔𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒂𝒔𝒚𝒎𝒑𝒕𝒐𝒕𝒆𝒔 𝒘𝒊𝒕𝒉 𝒕𝒉𝒆 𝒓𝒆𝒂𝒍 𝒂𝒙𝒊𝒔}
𝛼̅ =
(1 × αa + 1 × αb + ⋯ ) − (1 × α1 + 1 × α2 + ⋯ )
m − n
→ (3.9)
4:اﻟﺳرج ﻧﻘطﺔ ﻋﻧد ]( 𝑆𝑎𝑑𝑑𝑙𝑒 𝑝𝑜𝑖𝑛𝑡)
dF(s)
ds
= 0 → ( 3.10 )
5اﻟﺧطوط ﺗﻘاطﻊ ]اﻟﺗﺧيﻠﻲ اﻟمﺣور مﻊ اﻟمﺗﻘارﺑﺔ:
:
{ 𝑷𝒐𝒊𝒏𝒕 𝒘𝒉𝒆𝒓𝒆 𝒕𝒉𝒆 𝒃𝒓𝒂𝒏𝒄𝒉𝒆𝒔 𝒊𝒏𝒕𝒆𝒓𝒆𝒔𝒆𝒄𝒕 𝒘𝒊𝒕𝒉 𝒕𝒉𝒆 𝒊𝒎𝒂𝒈𝒊𝒏𝒂𝒓𝒚 𝒂𝒙𝒊𝒔}
الخاصية معادلة تستخدم،
1 + 𝐺( 𝑠) = 0 → (3.11)
ﺑاﺳﺗﺑدال𝑗𝜔 ﺑـ 𝑠اﻟمﻌادﻟﺔ ﻟﺗﺻﺑح1 + 𝐺( 𝑗𝜔)
6واألﺻفار األﻗطاب ﺗرﺗيب ]:ھﻧاﻟك ﻓإن اﻟﺣﻘيﻘﻲ اﻟمﺣور ﻋﻠﻰ وأﻗطاب أﺻفار ھﻧاﻟك ﻛان إذا
أﻗﺻﻰ ﻓﻲ اﻟﺟذر من ﺗﺑدأ ﺗفرﻋات.اﻟيمين
( رﻗم اﻟﺷﻛل3.2ﺗرﺗيب ﻛيفيﺔ ح ُِّوضي أدﻧاه ).اﻟﺣﻘيﻘﻲ اﻟمﺣور ﻋﻠﻰ واألﺻفار األﻗطاب
𝑠 اﻟمﺳﺗوى ( 𝑠 − 𝑝𝑙𝑎𝑛𝑒)
( رقم الشكل3.2المحور علﻰ واﻷصﻔار اﻷقطاب ترتيب ).الحقيقي
3.2:مﺣﻠوﻟﺔ أمﺛﻠﺔ
1ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط ارﺳم أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال داﻟﺔ من ]اﺳﺗﻘرار من وﺗﺣﻘق
اﻟﺛاﺑت ﻗيمﺔ وأوﺟد اﻟمﻧظومﺔ𝐴.
𝐺( 𝑠) =
𝐴
(1 + 2𝑠)(1 + 0.5𝑠)(1 + 0.25𝑠)
:اﻟﺣل
𝐶𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑜𝑓 𝑡ℎ𝑒 ℎ𝑖𝑔ℎ𝑒𝑠𝑡 𝑜𝑟𝑑𝑒𝑟 𝑜𝑓 𝑠ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑠](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-139-320.jpg)


![−67.5 + 4𝐴 = 0
∴ 4𝐴 = 67.5
∴ 𝐴 =
67.5
4
= 16.875
2داﻟﺔ من ]اﺳﺗﻘرار من وﺗﺣﻘق ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط أرﺳم أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال
ﻗيمﺔ وأوﺟد اﻟﻧظام اﺳﺗﻘرار ﻋدم أو𝐴.اﻟﺣدي ﻟالﺳﺗﻘرار
𝐺( 𝑆) =
𝐴
(3𝑆 + 2)( 𝑆2 + 4𝑆 + 8)
𝐺( 𝑆) = 𝐾𝐹( 𝑆)
ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆
𝐾 =
𝐴
3
𝐹( 𝑆) =
1
(𝑆 +
2
3
) ( 𝑆2 + 4𝑆 + 8)
( للمعادلة𝑺 𝟐
+ 𝟒𝑺 + 𝟖)،كاآلتي الجذور حساب يتم:
𝑆 =
−𝑏 ± √𝑏2 − 4𝑎𝑐
2𝑎
=
−4 ± √16 − 4 × 1 × 8
2
=
4 ± √−16
2
=
−4 ± 𝑗4
2
= −2 ± 𝑗2
𝐹( 𝑆) =
1
(𝑆 +
2
3
) ( 𝑆 + 2 − 𝑗2)( 𝑆 + 2 + 𝑗2)
𝑆𝑐 = −2 − 𝑗2 ، 𝑆 𝑏 = −2 + 𝑗2 ، 𝑆 𝑎 = −
2
3
اﻟمﺳﺗوى يوضح أدﻧاه اﻟﺷﻛلsﺗغادر ﻋﻧدما واﺗﺟاھاﺗﮭا اﻟﻘطﺑيﺔ اﻟﺟذور مواضﻊ ﻋﻠﻰ يﺣﺗوي اﻟذي
اﻟالﻧﮭائيﺔ اﻟﺻفريﺔ اﻟﺟذور ﻟﺗالﻗﻲ.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-142-320.jpg)

![∴ 𝜔2
=
32
3
∴ ω = ±√
32
3
∗الصﻔر من يقترب أو القطب عن يبتعد عندما للجذور الهندسي المحل اتجاه:
b
δ
b
= (
𝑏
𝛿
1
+
b
δ
2
+ ⋯ ) − (
b
δ
a
+
b
δ
c
+ ⋯ ) ± 180
b
δ
a
= 180 − tan−1
2
1.33
= 180° − 56.4 = 123.6°
b
δ
c
= 90°
∴
b
δ
b
= −(123.6 + 90) ± 180 = −33.6° 𝑜𝑟 − 393.6°
َّﻓإن مﺗماﺛل اﻟﮭﻧدﺳﻲ اﻟمﺣل أن وﺑما،
c
δ
𝑐
= −
b
δ
b
= 33.6°
قيمة إليجاد𝑨:بأخذالحقيقية المكونات معادلة:
−14𝜔2
+ 16 + 𝐴 = 0
−14 ×
32
3
+ 16 + 𝐴 = 0
∴ 𝐴 = 14 ×
32
3
− 16 = 149.3 − 16 = 133.3
3اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط وأرﺳم اﻟﻧظام اﺳﺗﻘرار من ﺗﺣﻘق أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال داﻟﺔ من ]
.ﻟﻠﺟذور
𝐺( 𝑆) =
𝐴( 𝑆2
+ 2𝑆 + 2)
(3𝑆 + 2)( 𝑆2 + 4𝑆 + 8)
:اﻟﺣل
𝐺( 𝑆) = 𝐾𝐹( 𝑆)
ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆
𝐾 =
𝐴
3
𝐹( 𝑆) =
𝑆2
+ 2𝑆 + 2
(𝑆 +
2
3
) ( 𝑆2 + 4𝑆 + 8)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-144-320.jpg)


![1
δ
2
= 90°
∴
1
δ
1
= (108.4 + 135 + 71.6) − (90) ± 180°
= 225 ± 180° = 405 𝑜𝑟 45°
الهندسي المحل أن بماَّفإن متماثل:
𝑐
δ
c
= −
b
δ
b
= −209.7 أو 150.3
2
δ
2
= −
1
δ
1
= −405° أو − 45° ، ًاوأيض
3.3اﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق راوث أﺳﻠوب{ 𝑹𝒐𝒖𝒕𝒉 𝒔𝒕𝒂𝒃𝒊𝒍𝒊𝒕𝒚 𝒄𝒓𝒊𝒕𝒆𝒓𝒊𝒐𝒏}
( راوث اﺳﺗﻧﺑطRouthاﻟمﻌادﻟﺔ ﺑاﺳﺗﺧدام وذﻟك اﻟﺗﺣﻛم ﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق ًامﺑﺗﻛر ًاأﺳﻠوﺑ )
ﻟﻠﻧظام اﻟمميزة{1 + 𝐺( 𝑠) = 0}مﺻفوﻓﺔ ﺷﻛل ﻓﻲ ووضﻌﮭاوﺗرﺗيﺑﮭا مﺣدداﺗﮭا إيﺟاد وﺑاﻟﺗاﻟﻲ
ﻟﻠمﺻفوﻓﺔ األول اﻟﻌمود ﻓﻲ.اﻟموﺟودة اﻟﻌﻧاﺻر مراﻗﺑﺔ يﺗم ﻻ أم مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا ما ﻟمﻌرﻓﺔ
األول اﻟﻌمود ﻓﻲ،وإﻻ مﺳﺗﻘرة اﻟمﻧظومﺔ ﻓﺗﻌﺗﺑر مﺗغيرة ﻏير ﻟﻠﻌﻧاﺻر اﻟﺟﺑريﺔ اﻹﺷارة ﻛاﻧت ﻓإذا
.مﺳﺗﻘرة ﻏير ﺳﺗﻌﺗﺑر ﻓإﻧﮭا
اﻟﺗاﻟيﺔ األمﺛﻠﺔ ﺧالل من وأﺣﻛامه راوث أﺳﻠوب ﺷرح ﺳيﺗم.مﻘارﻧﺔ ﺳيﺗم ًاأيضراوث أﺳﻠوب
ﺑأﺳﻠوب.اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل
3.4][أ مﺣﻠوﻟﺔ أمﺛﻠﺔ:
1األمامﻲ مﺳارھا داﻟﺔ اﻟﺗﻲ اﻟمرﺗدة اﻟﺗغذيﺔ وﺣدة ذات اﻟﺗﺣﻛم ﻟمﻧظومﺔ اﻟﮭﻧدﺳﻲ اﻟمﺣل أرﺳم ]
:ﻛاآلﺗﻲ
𝐺( 𝑆) =
𝐴( 𝑆 + 1)
𝑆2( 𝑆 + 2)
راوث طريﻘﺔ ﺟرب ًاأيض{ 𝑅𝑜𝑢𝑡ℎ}اﻟﻧظام اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق.
:اﻟﺣل
𝐺( 𝑆) = 𝐾𝐹( 𝑆)
ﻟـ اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆
𝐹( 𝑆) =
( 𝑆 + 1)
𝑆 × 𝑆( 𝑆 + 2)](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-147-320.jpg)

![0A1𝑆3
0A2𝑆2
002A − A
2
=
𝐴
2
𝑆1
00A2
2
− 0
A
2⁄
= 𝐴
𝑆0
مﺳﺗﻘرة ﺗﻌﺗﺑر اﻟمﻧظومﺔ ﻓإن مﺗغيرة ﻏير األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟﻌﻧاﺻر اﺷارة ان وﺑما.
ﻟالﺳﺗﻘراريﺔَّﻓإن اﻟﺣديﺔ∴ 𝐴 > 0 ،
𝐴
2
> 0،َّأن ﺑمﻌﻧﻰ𝐴اﻟﺻفر من أﻛﺑر ﺗﻛون.
2األمامﻲ اﻟمﺳار داﻟﺔ ]𝐺( 𝑆)ﻛاآلﺗﻲ ﻋﻧﮭا اﻟﺗﻌﺑير يمﻛن ﺗﺣﻛم ﻟمﻧظومﺔ:
𝐺( 𝑆) =
2100𝑆 + 101
3200𝑆2(10𝑆 + 1)
مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا ما ﻟﺗﺣديد آﺧر اﺳﻠوب أي أو راوث اﺳﻠوب اﺳﺗﺧدم؟ ﻻ أم
:اﻟﺣل
الخاصية معادلة:
1 + 𝐺( 𝑆) = 0
1 +
1 + 2100𝑆 + 101
3200𝑆3 + 3200𝑆2 = 0
3200𝑆3
+ 3200𝑆2
+ 2100𝑆 + 101 = 0
0210032000𝑆3
01013200𝑆2
003200 × 2100 − 32000 × 101
3200
= 1090
𝑆1
001090 × 101 − 0
1090
= 101
𝑆0
مﻧظومﺔ ﺗﻌﺗﺑر اﻟمﻧظومﺔ ھذه ﻓان ﺗﺗغير ﻟم األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟمﻌامالت إﺷارة أن وﺑما
.مﺳﺗﻘرة
3ﻟﻠداﻟﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ من ]ما ِّدﺣد اآلﺗيﺔذﻟك ﻏير أم مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا.
S4
+ 3S3
+ S2
+ 6𝑆 + 2 = 0](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-149-320.jpg)
![:اﻟﺣل
0211𝑆4
0063𝑆3
002−1𝑆2
00012𝑆1
0002𝑆0
اﺷارة أن ﺑمااﻟموﺟودة اﻟمﻌامالتإﻟﻰ ﺛم اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من ﺗغيرت األول اﻟﻌمود ﻓﻲ
ﻏير ﺗﻌﺗﺑر اﻟمﻧظومﺔ ﻓإن أﺧرى مرة اﻟموﺟب.مﺳﺗﻘرة
3.5راوث ألﺳﻠوب اﻟﻌامﺔ األﺣﻛام ﺑﻌض:
:( 𝐆𝐞𝐧𝐞𝐫𝐚𝐥 𝐑𝐮𝐥𝐞𝐬 𝐨𝐟 𝐑𝐨𝐮𝐭𝐡 𝐒𝐭𝐚𝐛𝐢𝐥𝐢𝐭𝐲 𝐂𝐫𝐢𝐭𝐞𝐫𝐢𝐨𝐧)
1اﻟمﻌامالت اﺷارة ﻓﻲ اﻟﺗغيرات ﻋدد أن راوث ﻗاﻧون يﻘول ]األول اﻟﻌمود ﻓﻲيﺳاوي ﻟﻠمﺻفوﻓﺔ
اﻟﺧاﺻيﺔ ﻟداﻟﺔ ﺟذور ﻋدداﻟمﺣور يمين ﻋﻠﻰ اﻟواﻗﻌﺔ.اﻟﺗﺧيﻠﻲ
اﻹﺷارة ﻓﻲ ﺗغيران ھﻧاﻟك اﻟﺳاﺑق اﻟمﺛال ﻓﻲاﻟموﺟب إﻟﻰ اﻟﺳاﻟب من ﺛم اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من
.اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺟذرين ﻓﮭﻧاﻟك وﻋﻠيه
2ھو األول اﻟﻌمود ﻓﻲ اﻟمﻌامالت ﻋدد ]𝑛 + 1ﺣيث𝑛اﻟﺧاﺻيﺔ داﻟﺔ رﺗﺑﺔ ھﻲ.
3ﻓمﻌادﻟﺔ ﺻفر ھو األﺧير اﻟﺻف مﻌامل ﻛان إذا ]اﻟﺧاﺻيﺔ.األﺻل ﻋﻧد ﺟذر ﻟديﮭا
4األﺻل ﻋﻧد مزدوج ﺟذر ﻟديﮭا اﻟﺧاﺻيﺔ ﻓمﻌادﻟﺔ ﺻفر ھو األﺧيرين اﻟﺻفين مﻌامل ﻛان إذا ].
5ﺻفر ھو األول اﻟﻌمود مﻌامالت أﺣد ﻛان إذا ]،ﺻغير ﺑرﻗم اﺳﺗﺑداﻟه ﻓيمﻛنًاﺟد∈ﺑغرض
:ﻟذﻟك وﻛمﺛال اﻟمﺻفوﻓﺔ ﻓﻲ اﻟمﺗﺑﻘيﺔ اﻟمﻌامالت ﺣﺳاب
S5
+ 2S4
+ 4S3
+ 8S2
+ 10S + 6 = 0
01041S5
0682𝑆4
0070 ≈∈𝑆3
006
−
14
∈
𝑆2
0007𝑆1
0006𝑆0
ومن اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من مرﺗين ﺗغيرت األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟمﻌامالت إﺷارة أن ﺑما
.اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺟذرين ﻟديﮭا ﺳيﻛون اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻓإن اﻟموﺟب إﻟﻰ اﻟﺳاﻟب
6ﺻفوف أﺣد ﻓإن األﺻل ﻧﻘطﺔ ﺣول ﺑﺗماﺛل ﻋﺔ َّموز اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺟذور ﺑﻌض ﻛاﻧت إذا ]
اﻟﺻفر ﻋﻠﻰ ﺟميﻌﮭا ﺳﺗﺣﺗوي راوث مﺻفوﻓﺔ.اﻟوضﻊ ھذا ويﺣدثمﻌادﻟﺔ ﺗمﺗﻠك ﻋﻧدمااﻟﺧاﺻيﺔ](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-150-320.jpg)
![مﻌﻛوﺳﺔ ﺑإﺷارات اﻟﺣﻘيﻘيﺔ اﻟﺟذور من زوج(±α)،ﺑإﺷارة اﻟمﻌﻘدة اﻟمراﻓﻘﺔ اﻟﺟذور من زوج أو
مﻌﻛوﺳﺔ(±jω)ﺑ أوواﻟمﻌﻘدة اﻟﺣﻘيﻘيﺔ اﻟﺟذور من د ِّﺣَّﺗُم زوج(−α ± 𝑗𝜔 ، 𝛼 ± 𝑗𝜔).
اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟذﻟك مﺛال:
S6
+ 6S5
+ 10S4
+ 12S3
+ 13S2
− 18𝑆 − 24 = 0
:راوث مصﻔوفة
0−2413101S6
00−18126S5
00−24168𝑆4
00000𝑆3
00000𝑆2
00000𝑆1
00000𝑆0
ﺻفS3
يﺣﺗويﺻفر ﻋﻠﻰ ﺟميﻌه
اﻟمﺳاﻋدة اﻟمﻌادﻟﺔ{Auxiliary equation} 𝐴( 𝑆)،اﻟﺻف مﻌامالت من ﻋﻠيﮭا اﻟﺣﺻول يمﻛن
.اﻟﺳاﺑق
𝐴( 𝑆) = 8𝑆4
+ 16𝑆2
− 24
= 8(S4
+ 2S2
− 3) = 8( 𝑆2
− 1)(S2
+ 3)
.اﻟرﺗﺑﺔ زوﺟيﺔ ًادائم ھﻲ اﻟمﺳاﻋدة اﻟمﻌادﻟﺔ
S6
+ 6S5
+ 10S4
+ 12S3
+ 13S2
− 18𝑆 − 24
= 8( 𝑆4
− 2S2
− 3)(S2
+ 6S + 8) = 0
اﻟمﻌادﻟﺔ ﺟذور( 𝑆2
− 1)( 𝑆2
+ 3)ھﻲ(S4
+ 2S2
− 3)
اﻟﺣﻘيﻘيﺔ اﻟﺟذور من زوج:S2
= 1 ، ∴ S = ±1
اﻟﺗﺧيﻠيﺔ اﻟﺟذور من زوج:S2
= −3 ، ∴ 𝑆 = ±√−3
اﻟمﻌادﻟﺔ ﺟذور( 𝑠2
+ 6𝑠 + 8)ھﻲ:S2
+ 6𝑆 + 8 = ( 𝑆 + 4)( 𝑆 + 2) = 0
∴ 𝑆 = −4، 𝑆 = −2
3.6:][ب مﺣﻠوﻟﺔ أمﺛﻠﺔ
1]هي مرتدة تغذية ذات تحكم لمنظومة الخاصية معادلة:
(S + 2)(S2
+ 4S + 8) + 𝐾 = 0
طريﻘﺔ اﺳﺗﺧدمﻗيم مدى ﻟﺗﺣديد راوث𝐾مﺳﺗﻘرة اﻟمﻧظومﺔ ﺗﻛون ﺣﺗﻰ.
الحل:](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-151-320.jpg)
![S3
+ 4S2
+ 8𝑆 + 2𝑆2
+ 8𝑆 + 16 + 𝐾 = 0
ﻋاﻟيﺔ اﻟمﻌادﻟﺔ ﺗرﺗيب ﺑإﻋادة،
S3
+ 6S2
+ 16𝑆 + (16 + 𝐾) = 0
راوث مصﻔوفة:
0161𝑆3
0(16 + 𝑘)6𝑆2
0080 − K
6
𝑆1
0016 + 𝑘𝑆0
أو من أﻛﺑر يﻛون أن يﺟب األول اﻟﻌمود ﻓﻲ األﺧير ﻗﺑل اﻟﺻفر ﻓإن مﺳﺗﻘرة اﻟمﻧظومﺔ ﺗﻛون ﻟﻛﻲ
ﻟﻠﻌﻧﺻر ًامﺳاوي..ﻟﻠﻌﻧﺻر ًامﺳاوي أو من أﻛﺑر األﺧير اﻟﻌﻧﺻر يﻛون أن يﺟب ًاأيض
80 − K
6
≥ 0 → (1)
80 − K ≥ 0
−𝐾 ≥ −80
∴ 𝐾 ≤ 80
16 + 𝐾 ≥ 0 → (2)
∴ 𝐾 = −16
−16 ≤ 𝐾 ≤ 80
ﻗيم𝐾ﺑين مﺣﺻورة ﺗﻛون80 و − 16.
2]ھﻲ ﺗﺣﻛم ﻟمﻧظومﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ:
𝑠( 𝑠2
+ 8𝑠 + 𝑎) + 4( 𝑠 + 8) = 0
راوث طريﻘﺔ اﺳﺗﺧدمﻗيم مدى ﻋﻠﻰ ﻟﻠﺣﺻول𝑎.مﺳﺗﻘرة اﻟمﻧظومﺔ ﻟﺗﻛون
:الحل
s3
+ 8𝑠2
+ 𝑎𝑠 + 4𝑠 + 32 = 0
s3
+ 8s2
+ (a + 4) 𝑠 + 32 = 0
راوث مصﻔوفة:
0(a + 4)1𝑆3
0328𝑆2
00a𝑆1
0032𝑆0
ﻗيمﺔ𝑎ﺻفر من أﻛﺑر أو مﺳاويﺔ ﺗﻛون أن يﺟب∴ 𝑎 ≥ 0
3.7:إضاﻓيﺔ مﺳائل
1ﻟﻠمﺳﺗوى اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺗﻘﻊ اﻟﺗﻲ اﻟﺟذور ﻋدد ﻟﺗﺣديد راوث طريﻘﺔ اﺳﺗﺧدم ]𝑠ﻟمﻌادﻻت
:اﻟﺗاﻟيﺔ اﻟﺧاﺻيﺔ](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-152-320.jpg)
![( 𝑖)s3
+ 5s2
+ 6s = 0
( 𝑖𝑖)𝑠3
+ 𝑠2
− 𝑠 − 1 = 0
( 𝑖𝑖𝑖)s3
+ 2𝑠2
+ 4𝑠 + 8 = 0
( 𝑖𝑣)𝑠4
+ 5𝑠3
+ 6𝑠2
= 0
( 𝑣)𝑠4
+ 5𝑠3
+ 5𝑠2
− 5𝑠 − 6 = 0
( 𝑣𝑖)𝑠4
+ 5𝑠3
+ 7𝑠2
+ 5𝑠 + 6 = 0
( 𝑣𝑖𝑖)𝑠5
+ 𝑠4
+ 5𝑠3
+ 5𝑠2
− 4𝑠 + 4 = 0
( 𝑣𝑖𝑖𝑖)𝑠5
+ 4𝑠4
+ 6𝑠3
+ 24𝑠2
+ 25𝑠 + 100 = 0
اﻟﺟذور ﻋﻠﻰ ف َّﺗﻌر ًاوأيض.األﺻل ﻧﻘطﺔ ﺣول ﺑﺗماﺛل ﻋﺔ َّوزُماﻟ
2ھﻲ ﺗﺣﻛم ﻟمﻧظومﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ ]:
𝑠( 𝑠2
+ 6𝑠 + 13) + 𝑘 = 0
ﻗيم ﺣدد ]أ𝑘ﺗﺟ اﻟﺗﻲ.مﺳﺗﻘرة اﻟمﻧظومﺔ ﻌل
ﻗيم ﺣدد ]ب𝑘اﻟﺟذور من زوج ﺗمﺗﻠك اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺗﺟﻌل اﻟﺗﻲاﻟمﺣور ﻋﻠﻰ اﻟمﻌﻘدة اﻟمراﻓﻘﺔ
.اﻟﺗﺧيﻠﻲ
ﻗيم ﺣدد ]ج𝑘اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺗﺟﻌل اﻟﺗﻲاﻟمراﻓﻘﺔ اﻟﺟذور من زوج ﺗمﺗﻠكاﻟﺣﻘيﻘﻲ ﺟزئﮭا اﻟﺗﻲ
ھو−1.](https://image.slidesharecdn.com/solutionofproblemsininstrumentationandengineeringcontrolinarabiclanguage-170811050113/85/Solution-of-problems-in-instrumentation-and-engineering-control-in-arabic-language-153-320.jpg)



Solution of problems in instrumentation and engineering control in arabic language
- 2. مســ حلــولائل و قيــاس أجهـزة فيتحـكم سليم المرضي محمد أسامةان الميكانيكية الهندسة قسم والتقنية الهندسة كلية النيل وادي جامعة–عطبرة إي إصدارات-كتب أيار ،لندن-مايو2016
- 3. Matters Solutions in measuring and control devices By: Osama Mohamed El-Mordhi All Rights Reserved to the Author Published by E-Kutub.com, 2016 ISBN: 978-1-78058-206-1 ***** الطبعةاﻷولﻰ،ﻟﻧأيار ،دن-مايو2016 اﻟمؤﻟ:فالمرضي محمد أسامة اﻟﻧاﺷ:رE-kutub Ltd،ﺷرﺑ ﻛﺔريطﻓﻲ مﺳﺟﻠﺔ اﻧيﺔاﻧﺟﻠﺗراﺑرﻗ:م7513024 ©جميﻊالحقوقمحﻔوظللم ةؤلف ﺗﺟ ﻻإ وزﻋاط دةﺑاﻋﺔأيﺟزءما ھذا نﻟﻛﺗاأ بﻟﻛﺗروﻧياأوﻋﻠﻰ.ورقيﺟ ﻻ ﻛماا وزﻻﻗﺗﺑاسما دون نﻹﺷاا رةﻟﻰ اﻟمﺻ.در أيمﺣاوﻟﻠﻧﺳﺦ ﻟﺔإ أوﻋادةاﻟﻧﺷرﺗﻌرضﺻاﺣﺑﮭااﻟﻰاﻟمﺳؤوﻟيﺔاﻟﻘاﻧو.ﻧيﺔ إذاﻋﺛرتﻋﺑ ﻧﺳﺧﺔ ﻋﻠﻰو أي رﺳيﻠﺔاﺧرىﻏيرموﻗﻊاﻟﻧاﺷ( رإي-كتبأو )ﻏوﻏلﺑوﻛ،سﻧرﺟإ وﺷﻌارﺑ ﻧاوﺟود ﻏي ﻧﺳﺧﺔرمﺷروﻋﺔوذﻟك ،ﺑاﻟﻛﺗاﺑﺔإ:ﻟيﻧا ekutub.info@gmail.com يمﻛﻧا كﻟﻛﺗاﺑﺔاﻟﻰاﻟمؤﻟفﻋﻠﻰاﻟﻌﻧا وانﻟﺗاﻟﻲ: il.comosamamm64@gma
- 4. وعرفان شكر وﺟميﻊ وﺻﺣﺑه آﻟه وﻋﻠﻰ مﺣمد وﺧادمه رﺳوﻟه ﻋﻠﻰ واﻟﺻﻠوات واﻟﺗﺑريﻛات هلل واﻟﻌرﻓان اﻟﺷﻛر .اﻟﻘيامﺔ يوم إﻟﻰ ﺗﺑﻌه من وﺧاﻟﺗﻲ ،ﺳﻠيمان اﻟمرضﻲ مﺣمد اﻟﻌزيز وأﺑﻲ ،طه درار ﺧضرة اﻟغاﻟيﺔ أمﻲ من ِّلُﻛ ﻟذﻛرى طه درار زﻋفران اﻟﺣﺑيﺑﺔ.وﺗدﺑيره وﺗرﺗيﺑه اﻟوﻗت واﺣﺗرام ﻟﻠﻌمل اﻟﻌظيمﺔ اﻟﻘيمﺔ مﻧﮭم ﺗﻌﻠمت اﻟذين ﻟﺣﺑﮭم ًاﺗﻘدير وآيﺔ روان ،رؤى اﻟﺛالث وﺑﻧاﺗﻲ اﻟمﺟيد ﻋﺑد ﻋﺑاس ﻧوال األوﻟﻰ زوﺟﺗﻲ إﻟﻰ .األمور وﺗﺗﺷاﺑك ﺗﺗﻌﻘد ﻋﻧدما ًﺔَّﺻﺧا واﻟﺳﻛون اﻟراﺣﺔ ﺗوﻓير ﻓﻲ ومﺛاﺑرﺗﮭم وﺻﺑرھم هللا ﻋﺑد ﻟمياء اﻟﺛاﻧيﺔ زوﺟﺗﻲ إﻟﻰدﻓﻌﻧﻲ اﻟذي اﻟزﺧم هللا إﻟﻰ وﺗضرﻋﮭا ﺣﺑﮭا لَّﺛَم اﻟﺗﻲ ﻓزاري ﻋﻠﻲ .اﻟﺷائك واﻟمﻌرﻓﺔ اﻟﺑﺣث طريق ﻓﻲ ﻟﻠمﺳير اﻟﻛﺗاب ھذا إﺧراج ﻓﻲ ووﻗﺗه وﻓﻛره ﺑﺟﮭده ﺳاھم من ﻟﻛل أﺟذﻟه ﺑاﻟﺷﻛر يﺗﻘدم أن اﻟﻛاﺗب ُد َّوَي اﻟميﻛاﻧيﻛ اﻟﮭﻧدﺳﺔ ﺑﻘﺳم األﺳاﺗذة اﻟزمالء ﺑذﻟك ويﺧص اﻟمطﻠوﺑﺔ ﺑاﻟﺻورة،اﻟﻧيل وادي ﺑﺟامﻌﺔ يﺔ .األﺣمر اﻟﺑﺣر ﺑﺟامﻌﺔ اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﺑﻘﺳم األﺳاﺗذة األﺧوة ًاوأيض وإﻋادة مراﺟﻌﺔ ﻓﻲ ﻛﺑير ﺑﻘدر ﺳاھم اﻟذي ﻋﺛمان يس مﺣمود ﻟﻠﺑروﻓيﺳور واﻟﻌرﻓان واﻟﺗﻘدير اﻟﺷﻛر .اﻟﻛﺗاب مﺣﺗويات مراﺟﻌﺔ اﻟﮭﻧ وﺑﻛاﻟوريوس دﺑﻠوم ﻟطالب أﺳاﺳيﺔ ﺑﺻفﺔ اﻟﻛﺗاب ھذا أھديﺧاﺻﺔ اﻟﺗﺧﺻﺻات ﺟميﻊ ﻓﻲ دﺳﺔ اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم طالب.مﺟال ﻓﻲ اﻟﺗطﺑيﻘات من اﻟﻛﺛير اﻟﻛﺗاب ھذا يﺳﺗﻌرض ﺣيثاألﺟﮭزة واﻟيدوي اآلﻟﻲ اﻟﺗﺣﻛم ومﺑادئ اﻟدﻗيﻘﺔ. ﺑمرﻛز ﻋﻠﻲ مﺣمد مﺣمود أﺳامﺔ اﻟمﮭﻧدس إﻟﻰ وامﺗﻧاﻧﻲ ﺷﻛري ﻋن وامﺗﻧاﻧﻲ ﺷﻛري ﻋن رِّﻋﺑُوأ اﻟﺣاﺳوب ﻟﺧدمات داﻧيﺔمراﺟﻌﺔ ،طﺑاﻋﺔ ﻓﻲ اﻟﺳاﻋات من اﻟﻌديد أﻧفق اﻟذي ﻋطﺑرة ﺑمديﻧﺔ واﻟطﺑاﻋﺔ .مرة من أﻛﺛر اﻟﻛﺗاب ھذا طﺑاﻋﺔ وإﻋادة ﻓائدة ذو يﻛون أن آمل واﻟذي اﻟمﺗواضﻊ اﻟﻌمل ھذا َّلﺑيﺗﻘ أن وﺗﻌاﻟﻰ ﺳﺑﺣاﻧه هللا من أرﺟو ،ًاأﺧير .ﻟﻠﻘارئ
- 5. مقـدمة مﻧه ًاوإيماﻧ اﻟﻛﺗاب ھذا مؤﻟف َّإنإﺛراء ﻓﻲ اﻟﺟامﻌﻲ األﺳﺗاذ ﺑه يﻘوم اﻟذي درَّﻘواﻟم اﻟﻌظيم ﺑاﻟدور اﻟﻛﺗاب ھذا يفﻲ أن يأمل يمﺔِّاﻟﻘ اﻟﮭﻧدﺳيﺔ واﻟﻛﺗب ﻟﻠمراﺟﻊ واﻟﺗرﺟمﺔ واﻟﺗﻌريب اﻟﺗأﻟيف ﺣرﻛﺔ اﻟﺑﻛاﻟوريوس ﺑرامج ﺑمﺗطﻠﺑات،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻟطالب اﻟﻌام واﻟدﺑﻠوم اﻟﻌاﻟﻲ اﻟدﺑﻠوم،ھﻧدﺳﺔ واﻟﺗﺻﻧي اﻹﻧﺗاجﻊ،ﺗغطيﺔ ﻓﻲ ﻛﺑيرة أھميﺔ من ﻟه ﻟما اﻟمدﻧيﺔ واﻟﮭﻧدﺳﺔ واﻹﻟﻛﺗروﻧيﺔ اﻟﻛﮭرﺑائيﺔ اﻟﮭﻧدﺳﺔ اﻟﮭﻧدﺳ اﻟﻘياس أﻧظمﺔ مﻘرراتيواﻟﺗﺣﻛم ﺔ(i.e.ميﻛاﻧيﻛيﺔ أﻧظمﺔ،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ،ﺣراريﺔ، وﻛﮭرﺑائيﺔ.) ًاﻟغوي اﻟﻛﺗاب ھذا يﺗفقمرﺟﻌ ُّدُﻌيو اﻟﺳوداﻧﻲ ﺣداﻟمو اﻟﮭﻧدﺳﻲ اﻟﻘاموس مﻊيمﻛن ﺣيث مﺟاﻟه ﻓﻲ ًا واﻟﺑاﺣث واﻟمﮭﻧدس اﻟطاﻟب مﻧه يﺳﺗفيد أن.ومذﻛرات مﺣاضرات من مﻘﺗﺑﺳﺔ اﻟﻛﺗاب ھذا مادة مﻌظم ًاﻋام ﻋﺷرون ﻋن ًالﻗﻠي ﺗزيد ﻟفﺗرة اﻟمﻘرر ﻟﮭذا ﺗدريﺳه ﻓﻲ مؤﻟفﺔ. اﻟﮭﻧدﺳيﺔ اﻟﻘياس أﺟﮭزة ﻋﻠﻰ اﻟﺗﻌرف أھميﺔ ﻟﺗأﻛيد اﻟﻛﺗاب ھذا يﮭدف،اﻟﺳيط أو مُّﻛاﻟﺗﺣ وأﻧظمﺔرة ورﺑطﮭماﺑاﻟميﻛاﺗروﻧيك ُﻌرفي اﻟذي اﻟﺟديد اﻟﺗطﺑيق ﻋﻠﻰ ف ُّاﻟﺗﻌر ﻟمﺣاوﻟﺔ اﻟميﻛاﻧيﻛيﺔ ﺑاألﻧظمﺔ (mechatronic i.e.)اﻟﻛﮭرﺑائيﺔ مَّﻛاﻟﺗﺣ ﺑأﻧظمﺔ اﻟميﻛاﻧيﻛيﺔ اﻟﻌﻧاﺻر يرﺑط واﻟذي.واﻹﻟﻛﺗروﻧيﺔ يﺣﺗويمن األول اﻟﻘﺳمﻓﺻول ﺛالث ﻋﻠﻰ اﻟﻛﺗاب.ﺑﻧظام اﻟﺗﻌريف ﻋﻠﻰ األول اﻟفﺻل يﺷﺗمل اﻟﻘياس،اﻟﻘياس أﻧظمﺔ أﻧواع،ميﻛاﻧيﻛيﺔ ألﻧظمﺔ اﻻﻧﺗﻘال ﻋوامل أو دوال،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ وﻛﮭرﺑائيﺔ،بَّﻛواﻟمر ﻲِّاألﺳ رُّﺧاﻟﺗأ ذات اﻻﻧﺗﻘال ﻟدوال اﻟمﻌياريﺔ أو اﻟﻘياﺳيﺔ ﺑاﻟﺻيغﺔ واﻟﺗﻌريف. اﻟﻌديد ًاأيض األول اﻟفﺻل نَّميﺗضاﻟمﺣﻠوﻟﺔ وﻏير اﻟمﺣﻠوﻟﺔ واﻟمﺳائل األمﺛﻠﺔ من. أو ﻛﺗﻠيﺔ مﺧططات ﺷﻛل ﻓﻲ اﻟﻧظام ﻋﻧاﺻر أو اﻻﻧﺗﻘال دوال ﺗمﺛيل ﻛيفيﺔ اﻟﺛاﻧﻲ اﻟفﺻل يﻧاﻗش اﻟﺗواﻟﻲ ﻋﻠﻰ موﺻﻠﺔ ﺻﻧدوﻗيﺔ،واﻟﺗوازي اﻟﺗواﻟﻲ ﺑين ھﺟين أو اﻟﺗوازي.ﺗﺑﺳيط يمﻛن األﺳﻠوب ﺑﮭذا ﻋ ﻋﻠﻰ ﺗﺷﺗمل اﻟﺗﻲ دةَّﻘاﻟمﻌ األﻧظمﺔ ﻓﮭمﻟﻠﻧظام اﻹﺟماﻟيﺔ اﻻﻧﺗﻘال داﻟﺔ ﺗﺣديد يﺗم وﺑاﻟﺗاﻟﻲ ﻋديدة ﻧاﺻر. ﻧظريات ﻓﮭم ﻋﻠﻰ اﻟطاﻟب ﺗﺳاﻋد اﻟﺗﻲ واﻟمﺳائل األمﺛﻠﺔ من اﻟﻛﺛير ﻋﻠﻰ ًاأيض اﻟفﺻل ھذا يﺷﺗمل ويﺳر ﺳﮭوﻟﺔ ﺑﻛل اﻟمادة وﺗطﺑيﻘات. األﺳاﺳيﺔ مﻛوﻧاﺗﮭا ﺣيث من اﻟﻘياس ﻧظم ﺑدراﺳﺔ اﻟﺛاﻟث اﻟفﺻل يﮭﺗم،أﻧواﻋﮭا.ي ﺣيثمﻧاﻗﺷﺔ ﺗم اﻟضغط ﻗياس أﺟﮭزة،( اﻟميﻛاﻧيﻛيﺔ اﻹﻧفﻌاﻻت ﻟﻘياس اﻟمﻘاومﺔ وﻻت ِّمﺣi.e.اﻻﻧفﻌال مﻘاييس،) ِّمﺣواﻟﺣرارة درﺟﺔ ﻟﻘياس اﻟمﻘاومﺔ ﻻت(i.e.واﻟﺛيرمﺳﺗورات اﻟمﻘاومﺔ ﺗرمومﺗرات،)ومضﺧمات واﻟزاويﺔ اﻟﺧطيﺔ اﻟميﻛاﻧيﻛيﺔ اﻹزاﺣﺔ.من اﻟﻌديد ھﻧاﻟك اﻟفﺻل ھذا ﻧﮭايﺔ ﻓﻲواﻟمﺳائل األمﺛﻠﺔ. ﻋﻠﻰ ًاﻗادر اﻟطاﻟب ﻟﺟﻌل وذﻟك اﻟﻛالﺳيﻛيﺔ مُّﻛاﻟﺗﺣ وأﻧظمﺔ اﻟﻘياس أﺟﮭزة ﻟﺗغطيﺔ اﻟﻛﺗاب ھذا يﮭدف اآلﺗﻲ:- 1مُّﻛوﺗﺣ ﻗياس ألﻧظمﺔ رياضيﺔ ﻧماذج ﺻياﻏﺔ .(i.e.ميﻛاﻧيﻛيﺔ أﻧظمﺔ،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ، وﻛﮭرﺑائيﺔ ﺣراريﺔ.) 2اﻟﻛﺗﻠيﺔ اﻟمﺧططات ﺗمﺛيل .اﻟﺗواﻟﻲ ﻋﻠﻰ ﻠﺔَّﺻمو اﻧﺗﻘال دوال أو ﻟﻌﻧاﺻر اﻟﺻﻧدوﻗيﺔ أو،اﻟﺗوازي ھﺟين ﻋﻧاﺻر أو. 3اﻟﻘياس ﻟﻧظام األﺳاﺳيﺔ وﻧاتُّﻛاﻟم ﻋﻠﻰ ف ُّاﻟﺗﻌر .(i.e.أو اﻟمطﻠوب يرِّاﻟمﺗغ أو اﻟدﺧل يرِّمﺗغ اﻟمرﻏوب،اﻟطاﻗﺔ ولُّﺣم،اﻹﺷارة مﮭيئ،اﻟﻌرض وﺣدة،اﻟفﻌﻠ يرِّاﻟمﺗغ أو اﻟﺧرج يرِّومﺗغﻲ.)
- 6. 4اﻟضغط ﻗياس أﻧظمﺔ ﺑﻌض دراﺳﺔ .(i.e.ﺑوردون أﻧﺑوب،اﻟمﻌﺗدل أو اﻟﻘائم اﻟماﻧوميﺗر .)اﻟمائل واﻟماﻧوميﺗر 5اﻟﺣرارة درﺟات ﻗياس أﻧظمﺔ ﺑﻌض دراﺳﺔ .(i.e.زﺟاﺟﺔ ﻓﻲ ﺳائل ﺗرمومﺗرات،ﺗرمومﺗرات اﻟمﻘاومﺔ،اﻟﺛيرمﺳﺗورات،اﻟﺣراريﺔ واﻟمزدوﺟات.) 6ماتَّﺧمض ﻋﻠﻰ اﻟﺗﻌرف .زاويﺔ أم ﻛاﻧت ﺧطيﺔ اﻟميﻛاﻧيﻛيﺔ اﻹﺷارة،ﻋاﻛﺳﺔ ﻏير أو ﻋاﻛﺳﺔ ﻟإلﺷارة. 7واﻟﺗيار اﻟﺟﮭد ﻗياس أﺟﮭزة ﺑﻌض دراﺳﺔ .. واﻻﺳﺗيﻌاب اﻟفﮭم ﺗﺑﺳيط وھو أﻻ أﺟﻠه من َبِّﺗُﻛ اﻟذي اﻟﮭدف اﻟﻛﺗاب ھذا قِّيﺣﻘ أن اﻟﻛاﺗب يأمل و واﻟمﮭﻧدس ﻟﻠطاﻟب ًامﻌيﻧ ﺗﺻﺑح ﺣﺗﻰ ﺑﺳﮭوﻟﺔ وھضمﮭا اﻟمادة ﻟﮭذهاﻟﻛﺗاب ﻟﮭذا ﻗارئ وﻛل اﻟﺑاﺣث. واﻟﺳداد اﻟﺗوﻓيق هللا أﺳأل اﻟﺧﺗام ﻓﻲ. اﻟموﻓق وهللا المؤلف سليمان المرضي محمد أسامة Osama Mohammed Elmardi Suleiman مارس2016م
- 7. المحـتويات ص ....اﻷول القسم7 ص ....مقدمة :اﻷول الﻔصل7 1.1ﺗﻌريفات 1.2واﻟﺗﺣﻛم اﻟﻘياس أﻧظمﺔ أﻧواع 1.3اﻟﺗﺣويل أو اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل 1.4مِّاﻟمﻧظ اﺳﺗﺟاﺑﺔ أﻧواع 1.5مﺣﻠوﻟﺔ أمﺛﻠﺔ 1.6إضاﻓﺔ مﺳائل ص ....الصندوقية أو الكتلية المخططات :الثاني الﻔصل24 2.1اﻟﺗﺧطيطيﺔ اﻟرﺳومات ﻓﻲ اﻟﺟﺑر اﺳﺗﺧدام 2.2مﺣﻠوﻟﺔ أمﺛﻠﺔ 2.3إضاﻓ مﺳائليﺔ ص ....القياس نظم :الثالث الﻔصل36 3.1اﻟﻧظام ﺗﺣﻠيل 3.2ﻛﺗﻠﻲ مﺧطط ﻓﻲ اﻟﻘياس مﻧظومﺔ ﺗمﺛيل 3.3اﻟﻘياس ﻧظم ﻟﺑﻌض ﻋمﻠيﺔ أمﺛﻠﺔ 3.4إضاﻓيﺔ مﺳائل ص ....المراجﻊ78 ص ....الثاني القسم80 ص ....الذاتي ُمكَّحالت ﻷنظمة مدخل :اﻷول الﻔصل81 1.1مدﺧل 1.2أﻧواعمُﻛَّﺣاﻟﺗ أﻧظمﺔ 1.3اﻟﻧظام ﺗمﺛيل 1.4مُﻛَّﺣاﻟﺗ ﻧظام ﻋﻧاﺻر ص ....العناصر استجابة :الثاني الﻔصل85 2.1األﺳﻲ رُﺧاﻟﺗأ داﻟﺔ أو ﻋامل ذات اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ 2.1.1اﻻﻧﺣدار داﻟﺔ 2.1.2اﻟﺧطوة داﻟﺔ 2.1.3اﻟدﻓﻊ داﻟﺔ 2.1.4ﻏير اﻟﺟيﺑﻲ اﻟدﺧل أو ﺧمدُماﻟ ﻏير اﻟﺗواﻓﻘﻲ اﻟدﺧلﺧمدُماﻟ 2.2األﺳﻲ اﻟﺗأﺧر ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ إضاﻓيﺔ أمﺛﻠﺔ 2.3األﺳﻲ رُّﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ مﺳائل 2.4بَّﻛرُماﻟ ﺧرُّاﻟﺗأ داﻟﺔ أو ﻋامل ذات اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ 2.5بَّﻛرُماﻟ رُﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ أمﺛﻠﺔ
- 8. 2.6بَّﻛرُماﻟ رُﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ إضاﻓيﺔ مﺳائل التحق :الثالث الﻔصلص ....كمُّحالت مُظُن استقرار من ق136 3.1اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط رﺳم 3.1.1مرﺗدة ﺗغذيﺔ وﺣدة ذات مغﻠﻘﺔ مﻧظومﺔ 3.1.2اﻹﻧﺗﻘال ﻟداﻟﺔ اﻟﻌام اﻟﺷﻛل 3.1.3ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل ﻟرﺳم اﻟﻌامﺔ األﺣﻛام 3.2مﺣﻠوﻟﺔ أمﺛﻠﺔ 3.3راوث أﺳﻠوباﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق 3.4][أ مﺣﻠوﻟﺔ أمﺛﻠﺔ 3.5راوث ألﺳﻠوب اﻟﻌامﺔ األﺣﻛام ﺑﻌض 3.6][ب مﺣﻠوﻟﺔ أمﺛﻠﺔ 3.7إضاﻓيﺔ مﺳائل ص ....والمراجﻊ الكتب153
- 9. األول القسم األول الفصل مقدمة (Introduction) 1.1( تعريﻔاتDefinitions): النظام(System):ألداء مﺟﺗمﻌﺔ ﺗﻌمل اﻟﺗﻲ اتِّاﻟمﻛوﻧ أو اﻟﻌﻧاﺻر من مﺟموﻋﺔ ھو اﻟﻧظام ( اﻟﺷﻛل .مﺣددة وظائف1.1( اﻟمﺧﺗﻠفﺔ ﺑمﻛوﻧاﺗه ﻟﻧظام ًاوﺻف ُوضحي أدﻧاه )i.e.ميﻛاﻧيﻛﻲ، ھيدروﻟيﻛﻲ،ﻧيوماﺗﻲ،ﻛﮭرﺑائﻲ،وﻏيره إﻟﻛﺗروﻧﻲ). ( شكل1.1نظام )المختلﻔة بمكوناته ( النظام حدSystem Boundary):ﻟمﻛوﻧات ﻛمﺣﺗوى ويﻌمل ﻟﻠﻧظام اﻟﺧارﺟﻲ اﻻطار ھو اﻟﻧظام. ( المتغيرة المقادير أو العناصرParameters):اﻟﻧظام ﺳﻠوك ﺗﺣدد اﻟﺗﻲ اﻟﻌﻧاﺻر ھﻲ. ومخرجات مدخالت( النظامInputs and outputs):إﻟﻰ ﺗدﺧل مﻌيﻧﺔ ﻛميات ھﻲ اﻟمﻧظومﺔاﻟمﺧرج ﻋﻧد مﻌيﻧﺔ ﻛميات ﻹﻧﺗاج مﻌاﻟﺟﺗﮭا ويﺗم. ( النظام بيئةSystem Environment):اﻟﺧارﺟيﺔ اﻟﺗأﺛيرات من مﺟموﻋﺔ ھﻲ اﻟﻧظام ﺑيئﺔ ( اﻟﻧظام أداء ﻋﻠﻰ ﺗؤﺛر اﻟﺗﻲi.e.اﻟضغط ﺗأﺛيرات،اﻟﺣرارة درﺟﺔ،اﻟرطوﺑﺔاﻟﻧﺳﺑيﺔ،اﻟرطوﺑﺔ اﻟﻧوﻋيﺔ،واﻟغﺑار األﺗرﺑﺔ،األمطار،واﻟﺑري اﻟﺗآﻛل مﻌدﻻتوﻏيرھا.) 1.2و القياس أنظمة أنواعالتحكم:(Types of Instrumentation & Control Systems) ھﻲ واﻟﺗﺣﻛم اﻟﻘياس أﺟﮭزة ﻓﻲ ﺗﺳﺗﺧدم اﻟﺗﻲ األﻧظمﺔ من ﻧوﻋان ھﻧاﻟك:
- 10. 1.2.1( الحلقة مﻔتوح قياس نظامOpen – Loop Measurement System): يﺗمما ﻟمﻧظومﺔ األداء مﺗطﻠﺑات ضﺑطمﻧﮭا اﻟمطﻠوﺑﺔ اﻟوظيفﺔ ﺑأداء ﻟﻠماﻛيﻧﺔ ويﺳمح اﻟمﻧظم ﻓﻲ اﻟمالﺑس أو األطﺑاق ﻏﺳيل ماﻛيﻧﺔ ﻟذﻟك ﻛمﺛال اﻟمﺧرج ﻋﻧد اﻟﻧﺗيﺟﺔ ﻋن اﻟﻧظر ﺑﺻرف،إﺷارات ﻟوﺣﺔ اﻟمرور،اﻟﺷوارع وﻟمﺑات.رﻗم اﻟﺷﻛل(1.2)اﻟﺣﻠﻘﺔ مفﺗوح ﻟﻧظام ﻛﺗﻠﻰ مﺧطط يوضح أدﻧاه. ( شكل1.2الحلقة مﻔتوح قياس لنظام كتلي مخطط ) ﺣيثθiو اﻟدﺧل مﺗغير أو اﻟمرﻏوب او اﻟمطﻠوب اﻟمﺗغير ھوθoمﺗغير أو اﻟفﻌﻠﻲ اﻟمﺗغير ھو اﻟﺧرج. 1.2.2( الحلقة مغلق نظامClosed – Loop Measurement System): مﺗغير ﻗياس يﺗماﻟﻧظام مﺧرج ﻋﻧد اﻟﻧﺗيﺟﺔ ﻟﺗﺻﺣيح وذﻟك اﻟدﺧل ﺑمﺗغير ومﻘارﻧﺗه ﺑاﻧﺗظام اﻟﺧرج. ( مﺗﻘطﻊ اﻟﺣﻠﻘﺔ مغﻠق ﻟﻧظام مﺛالIntermittent Systemاﻟﺳيارة ومﻧظومﺔ اﻟﺛيرموﺳﺗات ھو ) مﺳﺗمر أو ﺗﺻلُم اﻟﺣﻠﻘﺔ مغﻠق ﻟﻧظام ومﺛال اﻟﺧزاﻧات ﻓﻲ اﻟﺳوائل مﻧاﺳيب يﺣدد اﻟذي اﻟﻌوامﺔ وﻧظام (Continuous Systemﻓﻲ اﻟﻛارﺑوريﺗر ﺟﮭاز أو اﻟديزل مﺣرﻛات ﻓﻲ اﻟميﻛاﻧيﻛﻲ اﻟﺣاﻛم ھو ) اﻟﺑﻧزين مﺣرﻛات.( رﻗم اﻟﺷﻛل1.3اﻟﺣﻠﻘﺔ مغﻠق ﻟﻧظام ًاﻛﺗﻠي ًامﺧطط يوضح أدﻧاه ). اﻟﺧرج مﺗغير ﻗياس اﻟﻧظام ھذا ﻓﻲ يﺗم ﺣيثθoإرﺳال ويﺗم اﻟمراﻗﺑﺔ ﻋﻧﺻر ﺑواﺳطﺔ ﺑاﺳﺗمرار اﻟﺧرج مﺗغير مﻘارﻧﺔ ﻓيه يﺗم اﻟذي اﻟمﻘارﻧﺔ ﻋﻧﺻر إﻟﻰ اﻟﻘراءةθoاﻟدﺧل ﺑمﺗغيرθi.ھذه ﻧاﺗج ( إﺷارة ﺷﻛل ﻓﻲ اﻟمﻧظم إﻟﻰ إرﺳاﻟه يﺗم اﻟمﻘارﻧﺔsignal)(i.e.ميﻛاﻧيﻛيﺔ،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ، ﻛﮭرﺑيﺔ،اﻟﻛﺗروﻧيﺔ.)اﻟﺦ .... ( شكل1.3الحلقة مغلق قياس لنظام كتلي مخطط ) ( اﻟمﻧظم يﻘومregulatorاﻟمﺣطﺔ إﻟﻰ اﻟطاﻗﺔ امداد ﺑﺗﻧظيم )(i.e.يراد اﻟﺗﻲ اﻟمﺻﻧﻊ أو اﻟماﻛيﻧﺔ اﻟفيزيائيﺔ ﻛمياﺗﮭا ﺑﻌض ﻓﻲ اﻟﺳيطرة أو اﻟﺗﺣﻛم،اﻟميﻛاﻧيﻛيﺔ أو اﻟﻛيميائيﺔ)ﻗيمﺔ ويﺟﻌل يﺗواﻓق ﺑما اﻟﺧرج مﺗغيرθoمﺳاويﺔ أو من ﻗريﺑﺔﻟاﻟدﺧل مﺗغير ﻘيمﺔθi. تشويش الماكينةالمنظم θoθi
- 11. ( رﻗم اﻟﺷﻛل1.4ﺳيارة ﻟمﻧظومﺔ ًاﻛﺗﻠي ًامﺧطط يوضح أدﻧاه ): ( شكل1.4سيارة لمنظومة كتلي مخطط ) 1.3عامل( التحويل أو االنتقال دالة أوTransfer Operator or Function): اﻟزمن ﻓﻲ داﻟﺔ ﻋادة ويﻛون ﻛامﻠﺔ ﻟمﻧظومﺔ أو ﻓردي ﻟﻌﻧﺻر اﻟمدﺧالت إﻟﻰ اﻟمﺧرﺟات ﻧﺳﺑﺔ ھو. يلي فيما سياقها سيتم االنتقال لدوال متباينة أمثلة عدة هنالك: 1.( اليايSpring): ( اﻟﺷﻛل1.5يا مﻧظومﺔ يوضح أدﻧاه )اﻟﺣر اﻟطرف ﻓﻲ مﺣوري اﻧضغاط ﺣمل ﻋﻠيﮭا مﺳﻠط ي اآلﺧر اﻟطرف ﻓﻲ ﺑﺟﺳاءة ومﺛﺑﺗﺔ. ( شكل1.5محوري حمل عليها مسلط ياي منظومة ) ﺣيث𝑘ﺑين ﻟﻠﻌالﻗﺔ اﻟﺗﻧاﺳب ﺛاﺑت أو اﻟياي ﻛزازة =𝐹و𝑥. 𝑥اﻹزاﺣﺔ =. Fاﻻﻧفﻌال ﻗوة =. F ∝ 𝑥،اﻻﻧفﻌال ﻗوة F = k 𝑥،اﻻﻧفﻌال ﻗوة اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝑥 𝐹 = 1 𝑘 يﻠﻲ ﻛما ﻛﺗﻠﻲ ﺑمﺧطط اﻻﻧﺗﻘال ﻋامل ﺗمﺛيل يمﻛن ﺣيث: 2.الرافعة أو الذراع((Lever: ( اﻟﺷﻛل1.6ﺑﺳيطﺔ ميﻛاﻧيﻛيﺔ راﻓﻌﺔ يوضح أدﻧاه )ﻟﺗﻘﻠيل ﺗﺳﺗﺧدماﻟﺟﮭد. ﺣيث: عةالسر o/pمجموعة تنظيم الوقود المحرك صندو ق الترو مجموعة التروس الفرقية العجالت الوقود i/p 1 k 𝑥F
- 12. = اﻟدﺧل ﻗوة1F = اﻟﺧرج ﻗوة2F ( رقم شكل1.6بسيطة ميكانيكية رافعة ) التزانأخذ يتم النظاماالرتكاز محور حول العزومOكاآلتي: اﻟﺳاﻋﺔ ﻋﻘارب ﻟدوران مﻌاﻛس اﺗﺟاه ﻓﻲ اﻟﻌزوم = اﻟﺳاﻋﺔ ﻋﻘارب دوران اﺗﺟاه ﻓﻲ اﻟﻌزوم. مﻌاﻛس اﺗﺟاه ﻓﻲ اﻟﻌزوم ًالﺗأﺻي أوﺣول اﻟطواف اﺗﺟاه ﻓﻲ اﻟﻌزوم = اﻟﻛﻌﺑﺔ ﺣول ﻟﻠطواف اﻟﻛﻌﺑﺔ. b2a = F1F اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝐹2 𝐹1 = 𝑎 𝑏 يﻠﻲ ﻛما ًامﺧططي ﺗمﺛيﻠه ويﺗم: 3.( كير أو نﻔاخBellows): ( اﻟﺷﻛل1.7ﻛير أو ﻧفاخ يوضح أدﻧاه )َّادداﻟﺣ يﺳﺗﺧدمه ﻛاﻟذيموﺳيﻘيﺔ ﻧفﺦ آﻟﺔ أو. ( رقم شكل1.7كير أو نﻔاخ ) ﺣيثBاﻟﻧفاخ ﺛاﺑت =. 𝑥اﻹزاﺣﺔ =. p ∝ 𝑥،اﻟﮭواء ضغط ∴ p = B 𝑥 a b 𝐹2𝐹1
- 13. اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝑥 𝑝 = 1 𝐵 ﻛاآلﺗﻲ ًامﺧططي ﺗمﺛيﻠه ويﺗم: 4.الكهربية المقاومة(Electrical Resistor): ( اﻟﺷﻛل1.8ﻛﮭرﺑيﺔ دائرة ﻓﻲ ﻛﮭرﺑيﺔ ﻟمﻘاومﺔ ًاﻋﻧﺻر يوضح أدﻧاه ) ( رقم شكل1.8كهربية مقاومة عنصر ) أوم ﻗاﻧون من: V = IRاﻟﺟ ﻓرقﮭاﻟﻛﮭرﺑﻲ د اﻻﻧﺗﻘال داﻟﺔ أو اﻻﻧﺗﻘال ﻋامل: 𝑇. 𝑜 = 𝑉 𝐼 = 𝑅 ﺗمﺛيﻠه ويﺗمﻛاآلﺗﻲ ًامﺧططي: 5الكهربي المحث .(Inductor): ( اﻟﺷﻛل1.9ﻛﮭرﺑيﺔ دائرة ﻓﻲ ﻛﮭرﺑﻲ ﻟمﺣث ًاﻋﻧﺻر يوضح أدﻧاه ). ( رقم شكل1.9كهربي محث عنصر ) ﺣيثLاﻟﻛﮭرﺑيﺔ اﻟمﺣاﺛﺔ =(Inductance) اﻟﻛﮭرﺑﻲ اﻟﺟﮭد ﻓرق: 1 B 𝑥𝑝
- 14. 𝑉 ∝ 𝑑𝐼 𝑑𝑡 = 𝐿𝐷𝐼 ﺣيث𝐷 ≡ 𝑑 𝑑𝑡 (i.e.ﻋاملD) داﻟﺔ أو ﻋاملاﻻﻧﺗﻘال: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝑉 𝐼 = 𝐿𝐷 ﻛاآلﺗﻲ ًامﺧططي ﺗمﺛيﻠه ويﺗم: 6الكهربي الميسﻊ .(Capacitor): ( اﻟﺷﻛل1.10ﻛﮭرﺑيﺔ دائرة ﻓﻲ ﻛﮭرﺑﻲ ﻟميﺳﻊ ًاﻋﻧﺻر يوضح أدﻧاه ). ( رقم شكل1.10كهربي ميسﻊ عنصر ) اﻟﺗيار ﺷدة: 𝐼 ∝ 𝑑𝑉 𝑑𝑡 𝐼 = 𝐶 𝑑𝑉 𝑑𝑡 = 𝐶𝐷𝑉 ﺣيثCھﻲاﻟﻛﮭرﺑيﺔ اﻟمواﺳﻌﺔ اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑉 𝐼 = 1 𝐶𝐷 يﻠﻲ ﻛما ًامﺧططي ﺗوضيﺣه ويمﻛن:
- 15. 7االهتزاز مخمد .(Dash pot or damper): ( اﻟﺷﻛل1.11اھﺗزاز مضائل أو مﺧمد يوضح أدﻧاه ) ( رقم شكل1.11اهتزاز مضائل أو مخمد ) اﻹﺧماد أو اﻟمضاءﻟﺔ ﻗوة: 𝐹 ∝ 𝑣 اﻹﺧماد أو اﻟمضاءﻟﺔ ،ﻗوة 𝐹 ∝ 𝑑𝑥 𝑑𝑡 ﻛاآلﺗﻲ اﻟﺳرﻋﺔ ﻋن اﻟﺗﻌﺑير يﺗم ﺣيث: 𝑑𝑥 𝑑𝑡 = 𝑥 𝑜 اﻹﺧماد و اﻟمضاءﻟﺔ ،ﻗوة F = 𝐶 𝑥 𝑜 = C 𝑑𝑥 𝑑𝑡 = 𝐶𝐷𝑥 ﺣيثCاﻟﻠزج اﻟمضاءﻟﺔ مﻌامل ھو(Coefficient of viscous damping.) عاملاالنتقال دالة أو: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝑥 𝐹 = 1 𝐶𝐷 8مخمد ياي بها ميكانيكية منظومة .(Spring damper System): ( اﻟﺷﻛل1.12يوضح أدﻧاه )يا ﺑﮭا مﻧظومﺔاھﺗزاز مضائل أو ومﺧمد ي. ( رقم الشكل1.12اهتزاز ومخمد ياي منظومة ) ﺣيث:𝑥iاﻟدﺧل إزاﺣﺔ ھﻲ.
- 16. 𝑥0اﻟﺧرج إزاﺣﺔ ھﻲ. ﻟﻠمﻧظومﺔ اﻟﺣرﻛﺔ مﻌادﻟﺔ: 𝑘( 𝑥𝑖 − 𝑥 𝑜) − 𝐶𝑥 𝑜 𝑜 = 0 𝑘𝑥𝑖 − 𝑘𝑥 𝑜 − 𝐶𝐷𝑥 𝑜 = 0 𝑘𝑥𝑖 = 𝑘𝑥 𝑜 + 𝐶𝐷𝑥 𝑜 = 𝑥 𝑜{𝑘 + 𝐶𝐷} ﻋاملاﻻﻧﺗﻘال داﻟﺔ أو: 𝑇. 𝑜 = 𝑥 𝑜 𝑥𝑖 = 𝑘 𝑘 + 𝐶𝐷 واﻟمﻘام اﻟﺑﺳط ﺑﻘﺳمﺔk %: 𝑇. 𝑜 = 1 1 + 𝐶 𝑘 𝐷 اﻻ داﻟﺔ ﻓإن ﺑاﻟﺗاﻟﻲرُّﺧﺗأ ذات اﻧﺗﻘال ﻟداﻟﺔ اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ مﻧاظرة ﺗﻛون ﻟﻠمﻧظومﺔ ﻧﺗﻘالِّأﺳﻰ واﻟﺗﻲيﻠﻲ ﻛما ﻋﻧﮭا اﻟﺗﻌﺑير يﺗم: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = 𝜃 𝑜 𝜃𝑖 = 1 1 + 𝜏𝐷 9/الوقود )(منسوب مستوىpetroleum level)): ( اﻟﺷﻛل1.13ﺧزان ﻓﻲ ﺳائل مﻧﺳوب ﻟﺗﺣديد مﻧظومﺔ يوضح أدﻧاه ). ( رقم شكل1.13خزان في سائل منسوب لتحديد منظومة ) يﺗﻧاﺳب اﻟﺳريان مﻌدل أن اﻟﻘول يمﻛناﻟﺻمام إزاﺣﺔ مﻊ ًاطردي. اﻟﺻمام إزاﺣﺔ∝اﻟﺳريان مﻌدل اﻟوﻗود مﻧﺳوب ﻓﻲ اﻟﺗغير∝اﻟﺻمام إزاﺣﺔ ∴ 𝑄 ∝ (ℎ𝑖 − ℎ 𝑜) ﻋن اﻟﺗﻌﺑير يمﻛن ًاايض𝑄ﻛاآلﺗﻲ: 𝑄 = 𝐴𝑣 ∝ (ℎ𝑖 − ℎ 𝑜) ﺣيثih)اﻟﺣوض إﻟﻰ اﻟوﻗود اﻧﻘطاع (مﺳﺗوى اﻟمرﻏوب أو اﻟمطﻠوب اﻟمﺳﺗوى ھو ohاﻟفﻌﻠﻲ اﻟمﺳﺗوى ھو.
- 17. 𝐴𝑣 ∝ (ℎ𝑖 − ℎ 𝑜) ∴ 𝐴 𝑑ℎ 𝑜 𝑑𝑡 = 𝐶(ℎ𝑖 − ℎ 𝑜) اﻋﺗﺑار ﺗم إذاC = 1: ∴ 𝑑ℎ 𝑜 𝑑𝑡 = 1 𝐴 (ℎ𝑖 − ℎ 𝑜) ﺣيثAاﻟوﻗود ﺣوض مﻘطﻊ مﺳاﺣﺔ ھﻲ 𝐷ℎ 𝑜 = 1 𝐴 ℎ𝑖 − 1 𝐴 ℎ 𝑜 𝐷ℎ 𝑜 + 1 𝐴 ℎ 𝑜 = 1 𝐴 ℎ𝑖 ℎ 𝑜 {𝐷 + 1 𝐴 } = 1 𝐴 ℎ𝑖 اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑜/𝑝 𝑖/𝑝 = ℎ 𝑜 ℎ𝑖 = 1 𝐴 𝐷 + 1 𝐴 واﻟمﻘام اﻟﺑﺳط ﺑضرب( ×A)ﻋﻠﻰ ﻧﺣﺻل: 𝑇. 𝑜 = 1 1 + 𝐴𝐷 مﻧا يﻛون واﻟذيا ﻟﻌﻧاﺻر اﻟﻌامﺔ ﻟﻠﺻيغﺔ ًاظراألﺳﻰ ﻟﺗأﺧر. (Standard Formula of Exponential lag elements) ﻛـ يﻛﺗب واﻟذي 1 1+𝜏𝐷 (ﺣيثτﻟﻠﻧظام اﻟدوري اﻟزمن أو ﻟﻠﻧظام اﻟزمن ﺛاﺑت ھو.) 1.4( المنظم استجابة أنواعTypes of Controller Response): 1( والغلق الﻔتح استجابة .On – Off Response:) اﻟﺗﺣﻛم ﺑمﺗغير اﻟﺧاﺻﺔ اﻟظروف مﻘﺗضيات ﺣﺳب يﺗوﻗف أو اﻟمﻧظم يﻌمل.اﻟﺗﺣﻛم ﻛان إذا أما ًامﺳﺗمر،ﻓإن اﻟﺧطأ ﻋﻠﻰ ﺗﻌﺗمد اﺳﺗﺟاﺑﺔ يﻌطﻲ اﻟمﻧظم.ًاﺛاﺑﺗ ﺗﺑاطؤا ﺗﺳﺑب ﻗد اﻟﻧظم ﺑﻌض ﻓﻲ اﻻﺳﺗﺟاﺑﺔ وھذه اﻟمﺧرج ﻋﻧد،ﻛاﻓيﺔ ﺑدرﺟﺔ ﺳريﻌﺔ اﻻﺳﺗﺟاﺑﺔ ﺗﻛون ﻻ ورﺑما. 2( التﻔاضلية االستجابة .Derivative Response): ﻟمﻌدل ًاايض يﺳﺗﺟيب ﻗد اﻟمﻧظم ﻓإن اﻟﺧطأ مﻊ يﺗﻧاﺳب اﻟذي اﻟﺗﺻﺣيح إﺟراء إﻟﻰ ﺑاﻹضاﻓﺔ اﻟمﺧرج ﻋﻧد اﻟﺗغير ﺗوﻗﻊ من يمﻛن ﻟﻛﻲ اﻟﺧطأ ﻓﻲ اﻟﺗغير. 3( التكاملية االستجابة .Integral Response): ﻓيﮭا مرﻏوب اﻟﺗﻛامﻠيﺔ اﻻﺳﺗﺟاﺑﺔ،يﺳﺗغرﻗه اﻟذي اﻟوﻗت ﻋﻠﻰ ًاايض اﻟﺗﺻﺣيح يﺗوﻗف ﺣيث اﻟﺧطأ،اﻟﺗفاضﻠيﺔ اﻟﻌمﻠيﺔ ﻓإن ًاﻋموم .اﻻﺳﺗﻘرار ﺣاﻟﺔ ﻓﻲ اﻻﺳﺗﺟاﺑﺔ ﻟﺗﺣﺳين ﺗﺳﺗﺧدم اﻟﺗﻛامﻠيﺔ واﻟﻌمﻠيﺔ اﻻﺳﺗﻘرار ﻋدم ﺣاﻟﺔ ﻓﻲ اﻻﺳﺗﺟاﺑﺔ ﻟﺗﺣﺳين ﺗﺳﺗﺧدم.
- 18. 1.5( محلولة أمثلةSolved Examples): 1( رﻗم اﻟﺷﻛل ﻓﻲ ﺗوضيﺣه يﺗم اﺣﺗﻛاﻛﻲ ياي ﻛﺗﻠﺔ ﻧظام .1.14أدﻧاه ).اﻟﻘوة أن اﻋﺗﺑرPھﻲ واﻹزاﺣﺔ اﻟدﺧلyﻟﻠﻛﺗﻠﺔmاﻟﻧظام ﺧرج ھﻲ.اﻟﻧظام ﻟﮭذا اﻻﻧﺗﻘال ﻋامل أوﺟد. ( رقم شكل1.14احتكاكي وياي كتلة نظام ) ﺣيثCاﻟﺳطح مﻊ اﻟﻛﺗﻠﺔ اﺣﺗﻛاك مﻌامل ھو،kو اﻟياي ﻛزازةpًاﺧارﺟي اﻟمﺳﻠطﺔ اﻟﻘوة ھﻲ. للنظام الحركة معادلة: النظام التزان: 𝑝 − 𝑀 𝑑2 𝑦 𝑑𝑡2 − 𝐶 𝑑𝑦 𝑑𝑡 − 𝑘𝑦 = 0 𝑝 = 𝑀 𝑑2 𝑦 𝑑𝑡2 + 𝐶 𝑑𝑦 𝑑𝑡 + 𝑘𝑦 𝑝 = 𝑀𝐷2 𝑦 + 𝐶𝐷𝑦 + 𝑘𝑦 = 𝑦 { 𝑀𝐷2 + 𝐶𝐷 + 𝑘} اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑦 𝑝 = 1 𝑀𝐷2 + 𝐶𝐷 + 𝑘 = 1 𝑘 + 𝐶𝐷 + 𝑀𝐷2 واﻟمﻘام اﻟﺑﺳط ﺑﻘﺳمﺔk %ﻋﻠﻰ ﻧﺣﺻل: 𝑇. 𝑜 = 𝑦 𝑝 = 1/𝑘 1 + 𝐶 𝑘 𝐷 + 𝑀 𝑘 𝐷2 اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ ًامﻧاظر يﻛون واﻟذيﻟﻌﻧﺻرمرﻛب ﺗأﺧرStandard formula of a complex lag element)ﻛاآلﺗﻲ ُﻛﺗبي واﻟذي ): 𝑇. 𝑜 = 𝜃 𝑜 𝜃𝑖 = 𝜇 1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2 ﺣيثζﻟﻠﻧظام اﻟمضاءﻟﺔ ﻧﺳﺑﺔ ھﻲ،𝜏اﻟزمن ﺛاﺑت ھو،وμاﻟﻧظام ﻛﺳب ھو. 2( اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ اﻟﻛﮭرﺑائيﺔ ﻟﻠدائرة اﻻﻧﺗﻘال داﻟﺔ ﺣدد .1.15وﺟود ﻋدم ﺑاﻓﺗراض أدﻧاه ) .ﺧارﺟﻲ ﺣمل
- 19. ( رقم شكل1.15محث بها كهربية دائرة )،وميسﻊ مقاومة عاليه للدائرة كيرتشوف قوانين بتطبيق: 𝑉𝑖 = 𝐿𝐷𝐼𝐿 + 𝑉𝑜 → (1) وﻟﻛن، 𝑉𝑜 = 𝐼 𝑅 𝑅 = 1 𝐶𝐷 𝐼 𝐶 → (2) ًاأيض، 𝐼𝐿 = 𝐼 𝑅 + 𝐼 𝐶 → (3) ( المعادالت من عليه1( و )3): 𝑉𝑖 − 𝑉𝑜 = 𝐿𝐷{ 𝐼 𝑅 + 𝐼 𝐶} ( اﻟمﻌادﻟﺔ ومن2): 𝐼 𝐶 = 𝐶𝐷𝑉𝑜 , 𝐼 𝑅 = 𝑉𝑜 𝑅 𝑉𝑖 − 𝑉𝑜 = 𝐿𝐷 { 𝑉𝑜 𝑅 + 𝐶𝐷𝑉𝑜} 𝑉𝑖 − 𝑉𝑜 = 𝐿 𝑅 𝐷𝑉𝑜 + 𝐿𝐶𝐷2 𝑉𝑜 𝑉𝑖 = 𝑉𝑜 {1 + 𝐿 𝑅 𝐷 + 𝐿𝐶𝐷2 } ﻋاملاﻻﻧﺗﻘال داﻟﺔ أو: 𝑇. 𝑜 = 𝑉𝑜 𝑉𝑖 = 1 1 + 𝐿 𝑅 𝐷 + 𝐿𝐶𝐷2 → (4) مرﻛب ﺗأﺧر ﻟﻧظام اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ ًامﻧاظر يﻛون واﻟذي. 3( رﻗم اﻟﺷﻛل ﻓﻲ موضح ﺑﺳيط ميﻛاﻧيﻛﻲ ﺗﺳارع مﻘياس .1.16اﻟوضﻊ يﻛون .أدﻧاه )𝑥ﻟﻠﻛﺗﻠﺔ Mاﻟدﺧﻠﻲ اﻟﺗﺳارع ﺑين اﻻﻧﺗﻘال داﻟﺔ ﺣدد .اﻟغالف ﺗﺳارع مﻊ ًامﺗﻧاﺳﺑ اﻟﺗﺳارع مﻘياس ﻟغالف ﺑاﻟﻧﺳﺑﺔ واﻟﺧرج𝑥. الحل: الحركة معادلة: اﻟمﺛال ھذا ﻓﻲ،اﻟﻛﺗﻠﺔ ﻋﻠﻰ ﺗﻌمل اﻟﺗﻲ اﻟﻘوى مﺟموع ﻓإنMاﻟذاﺗﻲ اﻟﻘﺻور ﺑﻘوة مﺳاواﺗﮭا يﺗم ﻟﻠﻛﺗﻠﺔM.
- 20. ( رقم شكل1.16تسارع مقياس )بسيط ميكانيكي 𝑀𝑑2 (𝑥 − 𝑦) 𝑑𝑡2 + 𝐶 𝑑𝑥 𝑑𝑡 + 𝑘𝑥 = 0 → (1) ( اﻟمﻌادﻟﺔ ﺗﺻﺑح ﻋﻠيه1ﻛاآلﺗﻲ ): 𝑀𝑑2 𝑥 𝑑𝑡2 + 𝐶 𝑑𝑥 𝑑𝑡 + 𝑘𝑥 = 𝑀𝑑2 𝑦 𝑑𝑡2 = 𝑀𝑎 → (2) اﻟدﺧل ﺗﺳارع ﺣيث: 𝑎 = 𝑑2 𝑦 𝑑𝑡2 𝑀𝐷2 𝑥 + 𝐶𝐷𝑥 + 𝑘𝑥 = 𝑀𝑎 𝑥{ 𝑀𝐷2 + 𝐶𝐷 + 𝑘} = 𝑀𝑎 اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑇. 𝑜 = 𝑥 𝑎 = 𝑀 𝑘 + 𝐶𝐷 + 𝑀𝐷2 واﻟمﻘام اﻟﺑﺳط ﺑﻘﺳمﺔk %ﻋﻠﻰ ﻧﺣﺻل: 𝑇. 𝑜 = 𝑀/𝑘 1 + 𝐶 𝑘 𝐷 + 𝑀 𝑘 𝐷2 4( رﻗم اﻟﺷﻛل .1.17ﻛزازﺗه ﺣﻠزوﻧﻲ ياي ﻋﻠﻰ مﺳﻧدة ﻛﺗﻠﺗﮭا ﺗﺟاھل يمﻛن ﻟوﺣﺔ يوضح أدﻧاه ) 200N/mمﻘدارھا مﻘاومﺔ يﻌطﻰ اھﺗزاز مﺧمد ﺑواﺳطﺔ اﻟﻠوﺣﺔ ﺣرﻛﺔ اﻋﺗراض يﺗم50N/(m/s). اﻟﻧظام وﻛﺳب ﻟﻠمﻧظومﺔ اﻟزمن ﺛاﺑت ﺛم ومن اﻻﻧﺗﻘال ﻋامل أوﺟد.
- 21. ( رقم شكل1.17) اﻟﺣرﻛﺔ مﻌادﻟﺔ: 𝐹 − 𝑘𝑥 − 𝐶𝑥0 = 0 𝐹 − 𝑘𝑥 − 𝐶𝐷𝑥 = 0 𝐹 = 𝑘𝑥 + 𝐶𝐷𝑥 = 𝑥 { 𝑘 + 𝐶𝐷} ∴ 𝑇. 𝑜 = 𝑥 𝐹 = 1 𝑘 + 𝐶𝐷 = 1 200 + 50𝐷 = 0.005 1 + 0.25𝐷 األﺳﻰ ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ اﻟﺻيغﺔ يﻧاظر اﻟذي: 𝜇 1 + 𝜏𝐷 اﻟزمن ﺛاﺑتτ = 0.25 sec،اﻟﻧظام وﻛﺳبk=0.005 5( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ اﻟميﻛاﻧيﻛيﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل أوﺟد .1.18:أدﻧاه ) ( رقم شكل1.18) ﻟﻠﻧظام اﻟﺣرﻛﺔ مﻌادﻟﺔ: 𝑘1{ 𝑥𝑖 − 𝑥 𝑜} + 𝐶{ 𝑥𝑖 𝑜 − 𝑥 𝑜 𝑜} − 𝑘2 𝑥 𝑜 = 0 𝑘1{ 𝑥𝑖 − 𝑥 𝑜} + 𝐶{ 𝐷𝑥𝑖 − 𝐷𝑥 𝑜} = 𝑘2 𝑥 𝑜
- 22. 𝑘1 𝑥𝑖 − 𝑘1 𝑥 𝑜 + 𝐶𝐷𝑥𝑖 − 𝐶𝐷𝑥 𝑜 = 𝑘2 𝑥 𝑜 𝑘1 𝑥𝑖 + 𝐶𝐷𝑥𝑖 = 𝑘1 𝑥 𝑜 + 𝐶𝐷𝑥 𝑜 + 𝑘2 𝑥 𝑜 𝑥𝑖{ 𝑘𝑖 + 𝐶𝐷} = 𝑥 𝑜{ 𝑘1 + 𝑘2 + 𝐶𝐷} اﻻﻧﺗﻘال داﻟﺔ أو ﻋامل: 𝑥0 𝑥𝑖 = 𝑘1 + 𝐶𝐷 𝑘1 + 𝑘2 + 𝐶𝐷 1.6اضافية مسائل(Additional Problems): 1( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ اﻟمﻧظومﺔ .1.19أدﻧا )ﺗﺟاھل (يمﻛن ﺧفيف ﻗضيب من ﺗﺗﻛون ه َّتﺑﺛُم )ﻛﺗﻠﺗه ﻠﺔَّﺻاﻟمف ﻋﻠﻰAاﻟﻠزﺟﺔ مﻘاومﺗه اھﺗزاز ومضائل40N/m/sاﻟﺟاﻧب ﻋﻠﻰ موﺻلBوياي ﻛزازﺗهIKN/mاﻟﻧﻘطﺔ ﻋﻧد اﻟﻘضيب ﺑاﺳﻧاد يﻘومC. اﻟراﺳيﺔ اﻟﺣرﻛﺔ ﻛاﻧت إذا𝑥ﺑمﻘدار ًازاوي ازاﺣﺗه إﻟﻰ ِّيؤدُﺗ ﻟﻠﻘضيبθ.اﻟﻧﺳﺑﺔ أوﺟد 𝜃 𝑥 ﻟإلزاﺣات .اﻟﺻغيرة رقم شكل(1.19) 𝑨𝒏𝒔. { 𝟐. 𝟓/(𝟏 + 𝟎. 𝟏𝟔𝑫)} 2( رﻗم اﻟﺷﻛل يﺑين .1.20ﻓيه اﻟداﺧﻠﺔ اﻟمياه ﻛميﺔ ًاﺻﮭريﺟ أدﻧاه )Qiمﻧه واﻟﺧارﺟﺔ0Qويﺗم ﺑواﺳطﺔ وضﻌﮭا ﺗﻌديل يمﻛن ﻋوامه ﺑاﺳﺗﺧدام وضﻌه ُضﺑطي ﺻمام ﺑواﺳطﺔ اﻟماء مﻧﺳوب ﻓﻲ اﻟﺗﺣﻛم ﻗالووظ.اﻟﻌوامﺔ ﺣرﻛﺔ مﻊ اﻟﺻﮭريج إﻟﻰ اﻟمياه ﺗدﻓق ويﺗﻧاﺳب،ﺧارج إﻟﻰ اﻟمياه ﺗدﻓق اﻋﺗﺑار ويمﻛن ﺑه اﻟموﺟودة اﻟمياه مﻧﺳوب مﻊ ًامﺗﻧاﺳﺑ اﻟﺻﮭريج،ًاﺻغير اﻟمﻧﺳوب ﻓﻲ اﻟﺗغيير يﻛون ﻋﻧدما وذﻟك. اﻟمياه ﻟمﻧﺳوب اﻟفﻌﻠﻲ اﻟﻌﻠو ﺑين اﻟﻌالﻗﺔ اﺳﺗﻧﺑط،اﻟﻘال ضﺑط ﺗغير ﻋﻧد اﻟمطﻠوب اﻟﻌﻠو وﺑين.ووظ
- 23. ( رقم شكل1.20) 𝑨𝒏𝒔. { 𝒉 𝒐 𝒉𝒊 = 𝟏 𝟏 + 𝑪 𝟐 𝑪 𝟏 + 𝑨 𝑪 𝟏 𝑫 } 3( رﻗم اﻟﺷﻛل يﺑين .1.21مﺗأرﺟح ﺑﺻمام ﻓيه اﻟﺗﺣﻛم يﺗم ًاھيدروﻟيﻛي ًاﻛﺑاﺳ ).يﻛون ﻋﻧدما األوﺳط وضﻌه ﻓﻲ اﻟﺻمام،اﻻﺳطواﻧﺔ ﻧﮭايﺗﻲ ﻋﻧد اﻟﺗدﻓق يﻘف.اﻟﻛﺑاس مﻘطﻊ مﺳاﺣﺔ2 0.003m، ھو اﻻﺳطواﻧﺔ داﺧل إﻟﻰ اﻟزيت قُّﻓﺗد َّلدمﻌ َّﻓإن ،األوﺳط وضﻌه من اﻟﺻمام يﺗﺣرك وﻋﻧدما s/3 0.01mاﻟﺻمام يﺣرﻛه مﺗر ﻟﻛل.( اﻟﺻورة ﻋﻠﻰ يﻛون اﻻﻧﺗﻘال ﻋامل أن وضحD1+τ)k/، اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضات ذﻛر مﻊ،من ﻛل ﻗيمﺔ اوﺟد ﺛمτوK. ( رقم شكل1.21) 𝑨𝒏𝒔. { 𝒙 𝒐 𝒙𝒊 = 𝟐 𝟏 + 𝟎. 𝟗𝑫 , 𝒌 = 𝟐 , 𝝉 = 𝟎. 𝟗𝒔} 4( رﻗم اﻟﺷﻛل ُوضحي .1.21اﻟمضغوط ﺑاﻟﮭواء ﺗﻌمل مؤازرة آﻟيﺔ أدﻧاه )،ﻓﻲ اﻟﺗﺣﻛم يﺗم ﺣيث اﻟﺻمام ﺣرﻛﺔ ذراع يﺣرﻛه ﻗالﺑﻲ ﺑﺻمام اﻻﺳطواﻧﺔ داﺧل إﻟﻰ اﻟﮭواء ﺗدﻓقyﺣرﻛﺔ ﻧﺻف ﺗﺳاوي اﻟوﺻﻠﺔxﺗﻌادل اﻟمﻛﺑس ومﺳاﺣﺔ1600mm2.ﺳ مﻌدل ايﺟاد يمﻛنداﺧل إﻟﻰ اﻟﮭواء ريان اﻟﻌالﻗﺔ من اﻻﺳطواﻧﺔQ=0.01ym3/sﺣيثyﺑاألمﺗار.إيﺟاد مﻊ ﻟآلﻟيﺔ اﻻﻧﺗﻘال ﻋامل اﺳﺗﻧﺑط اﻟزمن ﺛاﺑت،.اﻟمﻛﺑس ﻋمود مﻘطﻊ مﺳاﺣﺔ ﺑإھمال وذﻟك
- 24. ( رقم شكل1.22) 𝑨𝒏𝒔. { 𝜽 𝒐 𝜽𝒊 = 𝟏. 𝟓 𝟏 + 𝟎. 𝟖𝑫 , 𝝉 = 𝟎. 𝟖𝒔} اﻟمﺑيﻧﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال ﻋامل أوﺟد( رﻗم اﻟﺷﻛل ﻓﻲ1.23ادﻧاه ): ( رقم شكل1.23) 𝑨𝒏𝒔. { 𝒔 𝟏(𝑪𝑫 + 𝒔 𝟐)/ [ 𝑪𝑫 ( 𝒔 𝟏 + 𝒔 𝟐) + 𝒔 𝟏 𝒔 𝟐]}
- 25. الثاني الفصل الكتلية المخططات (Block Diagrams) 2.1( التخطيطية الرسومات في الجبر استخدامBlock Diagram Algebra): ما ﻟمﻧظومﺔ اﻟوظيفﻲ اﻟمﺧطط يﺑيناﻟمﺧﺗﻠفﺔ اﻟﻌﻧاﺻر ﺗوﺻيل ﻛيفيﺔ،أو اﻟﺗﺣويل دوال وﻛذﻟك مﻧﮭا ﺑﻛل اﻟﺧاﺻﺔ اﻟﺧاﻧات ﻓﻲ اﻟمدوﻧﺔ اﻟفرديﺔ اﻻﻧﺗﻘال.اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ إيﺟاد يمﻛن وﺑذﻟك ﻋﻧاﺻرھا دوال ﺑﺗﺟميﻊ ﻟﻠمﻧظومﺔ اﻻﺟماﻟيﺔ.اﻟﺧاﺻﺔ اﻟﺗﺣويل دوال زِّميُﺗﺳ ﺷرح من يﻠﻲ وﻓيما ا اﻟمﺳارات ﻓﻲ ﺑاﻟﻌﻧاﺻرﺑاﻟﺣرف ألماميﺔGﻓﺗميز اﻟمرﺗدة اﻟﺗغذيﺔ اﺗﺟاه ﻓﻲ اﻟﻌﻧاﺻر دوال أما ﺑاﻟﺣرفH. 2.1.1التوالي علﻰ المتصلة العناصر(Elements in Series or Cascade): ( رﻗم اﻟﺷﻛل2.1( اﻟﺗواﻟﻲ ﻋﻠﻰ موﺻﻠﺔ ﻋﻧاﺻر ﺛالث يوضح أدﻧاه )i.e.اﻟﻌﻧﺻر ﺧرج أن ﺑمﻌﻧﻰ اﻟﺛاﻧﻲ ﻟﻠﻌﻧﺻر دﺧل ھو.) ﺧر يﺗأﺛرﺑه اﻟﺧاﺻﺔ اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻟداﻟﺔ ًاﺗﺑﻌ ﻋﻧﺻر ﻛل ج،أو اﻟﺗﺣويل داﻟﺔ ﻓإن ذﻟك وﻋﻠﻰ اﻟﺗﺣويل ﻟدوال اﻟمﻧفردة اﻟﻘيم ضرب ﺣاﺻل ﻋن ﻋﺑارة ﺗﻛون اﻻﺟماﻟيﺔ اﻻﻧﺗﻘال،َّأن أي: 𝜃0 𝜃𝑖 = 𝐺1 × 𝐺2 × 𝐺3 ( رقم الشكل2.1التوالي علﻰ َّلةصمو عناصر ) 2.1.2المتصلة العناصر( التوازي علﻰElements in Parallel): ( رقم الشكل2.2التوازي علﻰ موصلة عناصر ثالث عدد يوضح أدناه ). اﻟدﺧل ﺑﻧفس اﻟﺛالﺛﺔ اﻟﻌﻧاﺻر من ﻛل ﺗغذيﺔ ﺗﺗم اﻟﺣاﻟﺔ ھذه ﻓﻲ𝜃𝑖ھو اﻟﺧرج يﻛون ذﻟك وﻋﻠﻰ .ﻋﻧﺻر ﺑﻛل اﻟﺧاﺻﺔ اﻟﺧرج ﻗيم مﺟموع أن أي: 𝜃0 𝜃𝑖 = 𝐺1 + 𝐺2 + 𝐺3 اﻟرمز ويدل⨂ﻓيﮭا اﻟداﺧﻠﺔ اﻹﺷارة ﻋالمﺔ ﺑيان مﻊ ﺗﺟميﻊ ﻧﻘطﺔ ﻋﻠﻰ.
- 26. ( رقم الشكل2.2التوازي علﻰ موصلة عناصر ) 2.1.3( الوحدة ذات المرتدة التغذية منظومة(Unity Feedback System: ( رقم الشكل2.3وحدة ذات خلﻔية تغذية منظومة يوضح أدناه ). ﺑاﻹﺷـارة اﻟمﻧظومـﺔ مدﺧل ﺗغذيــﺔ يﺗم اﻟﺣاﻟﺔ ھذه ﻓﻲiθاﻟفرق يﻛون وﺑذﻟكoθ-iθيميز واﻟذي ﺑاﻟرمزeθ.ﺑاﻟﻌﻧﺻر ﻓﻘط يﺗأﺛر اﻟذي ھو َّفإن وهكذا: 𝜃 𝑜 = 𝐺𝜃 𝑒 = 𝐺(𝜃𝑖 − 𝜃 𝑜) 𝜃 𝑜 = 𝐺𝜃𝑖 − 𝐺𝜃 𝑜 𝜃 𝑜 + 𝐺𝜃𝑖 = 𝐺𝜃𝑖 𝜃 𝑜[1 + 𝐺] = 𝐺𝜃𝑖 االنتقال أو التحويل دالة: 𝜃0 𝜃𝑖 = 𝐺 1 + 𝐺 ( رقم الشكل2.3وحدة ذات خلﻔية تغذية منظومة ) 2.1.4( عنصر يعترضها التي المرتدة التغذية منظومةFeed-back loop with element): ( رﻗم اﻟﺷﻛل2.4اﻟﺧﻠفﻲ اﻟمﺳار ﻓﻲ ﻋﻧﺻر يﻌﺗرضﮭا مﻧظومﺔ يوضح أدﻧاه ). اﻹﺷارة ﺗﻌديل يﺗم اﻟﺣاﻟﺔ ھذه ﻓﻲ0θاﻟﻌﻧﺻر ﺑواﺳطﺔ اﻟمرﺗدة اﻟﺗغذيﺔ اﺗﺟاه ﻓﻲ مﺳارھا ﻓﻲ وھﻲ Hاﻹﺷارة ﻻﻋطاء0θHاﻟﺗﺟميﻊ ﻧﻘطﺔ ﻋﻧد.اﻟﺧطأ إﺷارة ﺗﻛون وﺑذﻟكeθاﻟﻌﻧﺻر ﺑﮭا يغذي اﻟﺗﻲ ھﻲ األمامﻲ اﻟمﺳار ﻓﻲ اﻟموﺟود(𝜃𝑖 − 𝐻𝜃 𝑜). فإن ذلك وعلﻰ: 𝜃 𝑜 = 𝐺𝜃 𝑒 = 𝐺(𝜃𝑖 − 𝐻𝜃 𝑜)
- 27. 𝜃 𝑜 = 𝐺𝜃𝑖 − 𝐺𝐻𝜃 𝑜 𝜃 𝑜 + 𝐺𝐻𝜃𝑖 = 𝐺𝜃𝑖 𝜃 𝑜[1 + 𝐺𝐻] = 𝐺𝜃𝑖 أن نجد ومنها: 𝑇. 𝑜 = 𝜃0 𝜃𝑖 = 𝐺 1 + 𝐺𝐻 ( رقم الشكل2.4الخلﻔي المسار في عنصر يعترضها منظومة ) 2.2( محلولة أمثلةSolved examples): 1( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال او اﻟﺗﺣويل ﻋامل أوﺟد .2.5:أدﻧاه ) رقم الشكل(2.5) الحل: اﻟﻌﻧﺻر من اﻟﺧرج𝐺1 𝜃𝑖 = 𝐺1. اﻟﻌﻧﺻر من اﻟﺧرج𝐺4 𝜃𝑖 = 𝐺4. اﻟﻌﻧاﺻرG2و𝐺3اﻟﺗواﻟﻲ ﻋﻠﻰ مﺗﺻﻠﺔ ﻋﻧاﺻر ھﻲ.ﻛﺗﻠﺔ ﻓﻲ وﺗوﺣيدھا ضرﺑﮭا يمﻛن ﺑاﻟﺗاﻟﻲ واﺣدة.
- 28. 𝜃 𝑏 = 𝜃 𝑎 𝐺2 𝐺3 𝜃 𝑎 = 𝐺1 𝜃𝑖 − 𝐻𝜃 𝑏 ∴ 𝜃 𝑏 = ( 𝐺1 𝜃𝑖 − 𝐻𝜃 𝑏) 𝐺2 𝐺3 𝜃 𝑏 = 𝐺1 𝐺2 𝐺3 𝜃𝑖 − 𝐺2 𝐺3 𝐻𝜃 𝑏 𝜃 𝑏 + 𝐺2 𝐺3 𝐻𝜃 𝑏 = 𝐺1 𝐺2 𝐺3 𝜃𝑖 𝜃 𝑏(1 + 𝐺2 𝐺3 𝐻) = 𝐺1 𝐺2 𝐺3 𝜃𝑖 𝜃 𝑏 = 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻 𝜃𝑖 𝜃 𝑜 = 𝜃 𝑏 + 𝐺4 𝜃𝑖 ∴ 𝜃 𝑜 = 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻 𝜃𝑖 + 𝐺4 𝜃𝑖 ∴ 𝜃 𝑜 = 𝜃𝑖 { 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻 + 𝐺4} االنتقال أو التحويل عامل: 𝜃 𝑜 𝜃𝑖 = 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻 + 𝐺4 = 𝐺1 𝐺2 𝐺3 + 𝐺4 + 𝐺2 𝐺3 𝐺4 𝐻 1 + 𝐺2 𝐺3 𝐻 2( رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﺑيﻧﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ اﺳﺗﻧﺑط .2.6أدﻧاه ): ( رقم شكل2.6)
- 29. الحل::الشكل يمين أقصﻰ الموجودة االنتقال دالة من البدء يتم 𝜃 𝑜 𝜃 𝑎 = 𝐺2 1 + 𝐺2 𝐻1 الدالة إلﻰ االنتقال يتم بعد منالتيتليها. 𝜃 𝑜 𝜃 𝑏 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 1 + 𝐺1 𝐺2 𝐻1 1 + 𝐺2 𝐻1 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 1 + 𝐺2 𝐻1 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 الشكل يسار أقصﻰ في الموجودة الدالة إلﻰ ًاأخير االنتقال ثم.
- 30. 𝜃 𝑜 𝜃 𝑏 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 1 + 𝐺1 𝐺2 𝐻3 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 + 𝐺1 𝐺2 𝐻3 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 = 𝐺1 𝐺2 1 + 𝐺2 𝐻1 + 𝐺1 𝐺2 𝐻2 + 𝐺1 𝐺2 𝐻3 3( اﻟﺗراﻛب ﻗاﻧون ﺑاﺳﺗﺧدام أوﺟد .principle of superpositionاﻟﺧرج )0θﻟﻠمﻧظومﺔ ( رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﺑيﻧﺔ2.7دﺧل ﻹﺷارﺗﻲ ﺗﺗﻌرض اﻟﺗﻲ أدﻧاه )𝜃𝑖 ′ و𝜃𝑖 ′′ . ( رقم شكل2.7)
- 31. الحل:واحد وخرج دخالن هنالك أن بما التراكب قانون استخدام يتم المسألة هذه لحل. iاﻟدﺧل أن ﺑفرض .𝜃𝑖 ′′ًاﺻفر يﺳاوي،وأنθ 𝑜 ′ من اﻟﻧاﺗج اﻟﺧرج ھو𝜃𝑖 ′ : 𝜃 𝑜 ′ 𝐺1 𝜃𝑖 ′ = 𝐺3 1 + 𝐺3 𝐻 𝜃 𝑜 ′ = 𝐺1 𝐺3 𝜃𝑖 ′ 1 + 𝐺3 𝐻 iiاﻟدﺧل أن ﺑفرض .𝜃𝑖 ′ًاﺻفر يﺳاوي،من اﻟﻧاﺗج اﻟﺧرج وأن𝜃𝑖 ′′ ھوθ 𝑜 ′′ : θ 𝑜 ′′ 𝐺2θ𝑖 = 𝐺3 1 + 𝐺3 𝐻 θ 𝑜 ′′ = 𝐺2 𝐺3 𝜃𝑖 ′′ 1 + 𝐺3 𝐻 𝜃 𝑜 = 𝜃 𝑜 ′ + θ 𝑜 ′′ = 𝐺1 𝐺3 𝜃𝑖 ′ 1 + 𝐺3 𝐻 + 𝐺2 𝐺3 𝜃𝑖 ′′ 1 + 𝐺3 𝐻 = 𝐺1 𝐺3 𝜃𝑖 ′ + 𝐺2 𝐺3 𝜃𝑖 ′′ 1 + 𝐺3 𝐻 4( رﻗم اﻟﺷﻛل ﻓﻲ اﻟﻛﺗﻠﻲ اﻟمﺧطط رﺳم أﻋد .2.8ﻋالﻗﺔ ﻋﻠﻰ ﻟﻠﺣﺻول أدﻧاه )ﺑين𝜃𝑖و𝜃 𝑜.
- 32. ( رقم شكل2.8) الحل: عاليه المخطط ترتيب بإعادة: التراكب قانون باستخدام: iأن ﻧفﺗرض .iθ4Gاﻟﺻفر ﺗﺳاوي،وأن𝜃 𝑜 ′ من اﻟﻧاﺗج اﻟﺧرج ھوiθ1G ∴ 𝜃 𝑜 ′ 𝐺1 𝜃𝑖 ′ = 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻1 كاآلتي عنها التعبير يتم أو: 𝜃 𝑜 ′ 𝜃𝑖 ′ = 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻1 iiأن ﻧفﺗرض .iθ1Gوأن اﻟﺻفر ﺗﺳاوي𝜃 𝑜 ′′ من اﻟﻧاﺗج اﻟﺧرج ھوiθ4G:
- 33. أخرى مرة الترتيب وبإعادة: θ 𝑜 ′′ 𝐺4θ𝑖 = 𝐺3 1 + 𝐺2 𝐺3 𝐻1 :كاآلتي عنها التعبير يتم أو θ 𝑜 ′′ θ𝑖 = 𝐺3 𝐺4 1 + 𝐺2 𝐺3 𝐻1 اﻟﺗوازي ﻋﻠﻰ موﺻﻠين اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامﻠﻲ أن ﺑما،ﻋﻠﻰ ﻟﻠﺣﺻول ﺟمﻌﮭما يﻌﻧﻲ ﻓﮭذا ﻟﻠمﻧظومﺔ اﻻﺟماﻟﻲ اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل. 𝜃 𝑜 𝜃𝑖 = θ 𝑜 ′′ θ𝑖 + θ 𝑜 ′′ θ𝑖 = 𝐺1 𝐺2 𝐺3 1 + 𝐺2 𝐺3 𝐻1 + 𝐺3 𝐺4 1 + 𝐺2 𝐺3 𝐻1 = 𝐺3(𝐺1 𝐺2 + 𝐺4) 1 + 𝐺2 𝐺3 𝐻1 2.3( إضافية مسائلAdditional Problems): 1( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضح اﻟﻛﺗﻠﻲ ﻟﻠمﺧطط .2.9اﻟﻌالﻗﺔ ﺣدد أدﻧاه )ﺑين𝜃 𝑜و𝜃𝑖ﺑاﻟﺗﺧفيض اﻟﻛﺗﻠﻲ ﻟﻠمﺧطط اﻟمﺗﻌاﻗب.
- 34. ( رقم شكل2.9) 𝑨𝒏𝒔. { 𝑮 𝟏 𝑮 𝟒(𝑮 𝟐 + 𝑮 𝟑) 𝟏 − 𝑮 𝟏 𝑮 𝟒 𝑯 𝟏 + 𝑮 𝟏 𝑮 𝟒 𝑯 𝟐(𝑮 𝟐 + 𝑮 𝟑) } 2مغﻠق ﺗﺣﻛم ﻧظام .( ًاﺗﺷويﺷ ﻋﻠيه مﺳﻠط اﻟﺣﻠﻘﺔdisturbance( )S)Dاﻟﺷﻛل ﻓﻲ موضح ﻛما ( رﻗم2.10أدﻧاه )..اﻟﻧظام ﺧرج ﻋﻠﻰ األﺛر اﻟﺗراﻛب مﺑدأ ﺑاﺳﺗﺧدام وضح ( رقم شكل2.10) 𝑨𝒏𝒔. { 𝑮 𝟐(𝑮 𝟏 𝜽𝒊 + 𝑫(𝒔)) 𝟏 + 𝑮 𝟏 𝑮 𝟐 } 3رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﺑيﻧﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ اﺳﺗﻧﺑط .(2.11:ادﻧاه ) ( رقم شكل2.11)
- 35. 4رﻗم ﺷﻛل ﻓﻲ اﻟمﺑيﻧﺔ اﻟمﻧظومﺔ .(2.12-ﺧﻠف إﻟﻰ اﻟﺗﺟميﻊ ﻧﻘطﺔ ﺑﺗﺣريك ﺗرﺗيﺑﮭا أﻋيد )أ اﻟﻌﻧﺻرG،رﻗم اﻟﺷﻛل ﻓﻲ ﻛما(2.12ھﻲ ﺣاﻟﺔ ﻛل ﻓﻲ اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ أن أﺛﺑت )ب ـ G/(1+GH). ( رقم شكل2.12) 5أو اﻟﺗﺣويل داﻟﺔ أوﺟد .( رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﺑيﻧﺔ ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال2.13أدﻧاه ). ( رقم شكل2.13) 𝑨𝒏𝒔. {(𝑮 𝟏 𝑮 𝟐 /(𝟏 + 𝑮 𝟏 𝑮 𝟐 + 𝑮 𝟐 𝑯))} 6اﻟﺧرج أوﺟد .0θ( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ ﻟﻠمﻧظومﺔ2.14.أدﻧاه ) ( رقم شكل2.14) 𝑨𝒏𝒔. {(𝑮 𝟏 𝑮 𝟐 𝜽𝒊 ′ + 𝑮 𝟏 𝑮 𝟐 𝑯 𝟏 𝜽𝒊 ′′ ) /(𝟏 + 𝑮 𝟏 𝑮 𝟐 𝑯 𝟏 + 𝑮 𝟐 𝑯 𝟐) }
- 36. 7( رﻗم اﻟﺷﻛل يﺑين .2.15دﺧﻠين ذات مﻧظومﺔ أدﻧاه )𝜽𝒊 ′′ و𝜽𝒊 ′ .ﺧرج ﻹيﺟاد ﻋالﻗﺔ اﺳﺗﻧﺑط اﻟمﻧظومﺔ0θ. ( رقم شكل2.15) 𝑨𝒏𝒔. { 𝑮 𝟏 𝑮 𝟐 𝜽𝒊 ′ + 𝑮 𝟐 𝜽𝒊 ′′ 𝟏 + 𝑮 𝟏 𝑮 𝟐 𝑯 }
- 37. الثالث الفصل القياس نظم (Measurement Systems) 3.1تحليل( النظامAnalysis of a System): اﻟﮭﻧدﺳﺔ ﺗﻌﺗمدأﺳاﺳيﺔ ﺑﺻفﺔاﻟﻘياس ﻋﻠﻰ(i.e.واﻟزاويﺔ اﻟﺧطيﺔ األﺑﻌاد ﻗياس،اﻟﺗﺻميم اﻟماﻛيﻧات أﻋمدة أﺑﻌاد ﻟﻘياس اﻟﮭﻧدﺳﻲ،اﻟﮭﻧدﺳيﺔ اﻟمﻧﺷأة ﺗﺣمل َّأﻻ يﺟب ﺑاﻟﺗاﻟﻲ )وﻏيرھا اﻟمﺑاﻧﻲ اﻟﺗﺻميميﺔ اﻟﺣموﻟﺔ من أﻛﺑر ًالﺣم.اﻹﻧﺟﻠيزي اﻟمﺛل يﻘول اﻟمﻌﻧﻰ ھذا ﻓﻲ"The straw that breaks the camel back"" اﻟﺑﻌير ظﮭر ﻗﺻمت اﻟﺗﻲ اﻟﻘﺷﺔ " ﺑمﻌﻧﻰ.اتِّاﻟمﻛوﻧ ﻟﺗﺻﻧيﻊ أو اﻟﺳيارات ﻻﺧﺗﺑار أو اﻟﻘدرة مﺣطات ﻓﻲ مﺳﺗمرة إﺟراءات ﻓﻲ ﻟﻠﺗﺣﻛم أو اﻟﮭﻧدﺳيﺔ )(األﺟزاء ﻟم ﻧﺣﺗاج وﻏيرھا اﻟمﺑاﻧﻲ ھياﻛل أو اآلﻻت.ﺑاﻟﻘياس إﻻ يﺗأﺗﻰ ﻻ وھذا وﻛاﻓيﺔ دﻗيﻘﺔ ﻌﻠومات 3.2( كتلﻰ مخطط في القياس منظومة تمثيلBlock Diagram Representation): ( رﻗم اﻟﺷﻛل3.1يﺗرﻛب .ﻧموذﺟﻲ ﻗياس ﻟﻧظام األﺳاﺳيﺔ اﻟمﻛوﻧات يوضح أدﻧاه )اﻟﻧظام ھذامن اﻟفيزيائيﺔ اﻟﺧواص ﺑﺗﺣويل يﻘوم طاﻗﺔ مﺣول،ﺧواص إﻟﻰ اﻟﻘياس ﺻﻌﺑﺔ واﻟميﻛاﻧيﻛيﺔ اﻟﻛيميائيﺔ ﺑﺳﮭوﻟﺔ ﻗياﺳﮭا يمﻛن أﺧرى.ﻗياﺳﮭا يمﻛن ﺑﺣيث اﻹﺷارة ﺗﺻغير أو ﺑﺗﻛﺑير يﻘوم إﺷارة ومﮭيئ ﺑﺳﮭوﻟﺔ،وﺑاﻟﻌﻛس زاويﺔ إﻟﻰ ﺧطيﺔ من اﻹﺷارة ﺷﻛل ﺗغيير ﻋﻠﻰ اﻟﻘدرة ﻟه ﻛما.اﻟﻌرض وﺣدة أما ﻋﻠﻰ اﻟﻧﮭائيﺔ ﺻورﺗﮭا ﻓﻲ اﻹﺷارة ﺑﻌرض ﻓﺗﻘوماﻟﺳيارة ﺳرﻋﺔ مﺑين مﺛل مﺑيﻧات أو ﺷاﺷات،مﻧﺳوب وﻏيرھا اﻟوﻗود ﺣفظ ﺧزاﻧات ﻓﻲ اﻟوﻗود. اھﺗزاز ﺷدة ﻋﻠﻰ ﺗﻌﺗمد اﻟمادة ﺣرارة درﺟﺔ أن ومﻌﻠوم ماء ﺣرارة درﺟﺔ ﻗياس ُرادي أﻧه اﻓﺗرض اﻟمادة وﺟزيئات ذرات.ﻟﺻغرھا اﻻھﺗزازات ﻗياس يمﻛن ﻻ أﻧه ﺑما،ﻋادي ﻟﺛيرموميﺗر ﻓﺳﻧﺣﺗاج يﺳﺗﺧ( ﻟﻠطاﻗﺔ ﻛمﺣول دمtransducerﻓﻲ زﺟاﺟيﺔ أﻧﺑوﺑﺔ داﺧل ﺷﻌريﺔ أﻧﺑوﺑﺔ ﻋن ﻋﺑارة وھو ) ( ُﺻيﻠﺔﺑ ﻧﮭايﺗﮭاbulbوھذه اﻟﺣﺟم ﻓﻲ إﻧﻛماش أو ُّددﺗم إﻟﻰ اﻻھﺗزازات ﺑﺗﺣويل ﺗﻘوم ﺑاﻟزئﺑق مﻠيئﺔ ) .ﺑﺳﮭوﻟﺔ مﻌﮭا اﻟﺗﻌامل يﺗم ( رقم شكل3.1نموذجي قياس لنظام اﻷساسية اﻷجزاء )
- 38. ( ﺷﻌريﺔ أﻧﺑوﺑﺔ ﺧالل يمر اﻟزئﺑق ﺣﺟم ﻓﻲ اﻟﺗغير ﻓإن اﻟﺛيرموميﺗر ﺣاﻟﺔ ﻓفﻲcapillary tube) اﻟزﺟاﺟﺔ ﺳاق ﻓﻲ،رؤيﺗه يمﻛن ﺑﺣيث اﻟزئﺑق ارﺗفاع ﻓﻲ ًاﺗغير يﺻﺑح اﻟﺣﺟم ﻓﻲ اﻟﺗغير ﻓإن ﻋﻠيه .اﻟزﺟاج ﺧالل ( اﻟﻌرض وﺣدة ﺧالل من ﻋرضﮭا يﺟب اﻟﻧﮭائيﺔ ﺻورﺗﮭا ﻓﻲ اﻹﺷارةdisplay unitﺑ )ﺣيث مﻊ اﻟزئﺑق ﺧيط ﻧﮭايﺔ ﺑمﻘارﻧﺔ اﻟﺛيرموميﺗر ﺣاﻟﺔ ﻓﻲ مﺑاﺷرة يﺗم وھذا ويﺳر ﺑﺳﮭوﻟﺔ ﻗراءﺗﮭا يمﻛن اﻟزﺟاﺟيﺔ اﻟﺳاق ﺗدريج درﺟﺔ. 3.3القياس نظم لبعض عملية أمثلة: 3.3.1الضغط قياس أجهزة(Pressure Measuring Devices): i( :الضغط لقياس بوردون أنبوب .Bourdon Tube Pressure Gauge) ( اﻟمﻘطﻊ ﺑيضاوي أﻧﺑوب ﻋن ﻋﺑارة ﺑوردون أﻧﺑوبoval cross-sectionﺷﻛل ﻓﻲ مﺣﻧﻰ ) دائري ﻗوس،( رﻗم ﺷﻛل ﻓﻲ َّحموض ﻛما اآلﺧر اﻟطرف ﻋﻧد ومفﺗوح طرﻓيه أﺣد ﻋﻧد مغﻠق3.2) أدﻧاه.دائري إﻟﻰ ﺑيضاوي من اﻟمﻘطﻊ يﺗﺣول ﺑاﻟمرور ﻟﻠضغط يﺳمح ﻋﻧدما،ﻓﻲ ھذا يﺗﺳﺑب ﺣيث أﻛﺑر دائرة ﻗطر ﻟﻧﺻف ًاﻗوﺳ ﻟيﺻﺑح ﻟالﺳﺗﻘامﺔ األﻧﺑوب ميل.يﻌمل ﺑوردون أﻧﺑوب أن يﻌﻧﻲ ھذا ﺗﻛون األﻧﺑوب ﺣاﻓﺔ إزاﺣﺔ أن وﺑما ﺧطيﺔ إزاﺣﺔ إﻟﻰ اﻟضغط ﺑﺗﺣويل يﻘوم ﺣيث ﻟﻠطاﻗﺔ ﻛمﺣول إﺷارة مﮭيئ ﺑاﺳﺗﺧدام ﺗﻛﺑير إﻟﻰ ﺗﺣﺗاج ﻓإﻧﮭا ﺻغيرة.ھ ﻓﻲ اﻟمﻘوي أو واﻟمﻛﺑرميﻛاﻧيﻛﻲ ھو اﻟﺣاﻟﺔ ذه ﺑﻌضﮭما مﻊ مﻌﺷﻘان )(ﺑﻧيون ﺻغير وﺗرس دائرة رﺑﻊ ﺷﻛل ﻓﻲ ﺗرس اﺳﺗﺧدام يﺗم ﺣيث،وﻟﻛن ﺧطيﺔ وﻟيﺳت زاويﺔ إزاﺣﺗه أو ﺗﻛﺑيره.إزاﺣﺔ إﻟﻰ ﺧطيﺔ إزاﺣﺔ من ﻟإلﺷارة ﻟﺗﺣويل ﻓﺳﻧﺣﺗاج وﻟﮭذا واﻟذراع اﻟوﺻﻠﺔ ﺑواﺳطﺔ زاويﺔ.يﺗ ًاأﺧيريدور مؤﺷر ﺑﺗرﻛيب اﻟﻧﺗيﺟﺔ ﻋرض مﻟيﻘرأ اﻟﺑﻧيون مﻊ .دائري ﺗدريج ﻓﻲ اﻟضغط ( رقم شكل3.2الضغط لقياس بوردون أنبوب ) ( رﻗم اﻟﺷﻛل3.3اﻟضغط ﻟﻘياس ﺑوردون ﻟمﻘياس اﻟﻛـﺗﻠﻲ اﻟمﺧطط يوضح أدﻧاه )
- 39. ( رقم شكل3.3بوردون لجهاز كتلي مخطط ) ( مثال1): مﻘدارھا مؤﺷر ﺑدورة ﺗﺻميمه يراد ضغط مﻘياس300ﺻفر من اﻟضغط يﺗغير ﻋﻧدما درﺟﺔ إﻟﻰ10 bar.ﺑمﻘدار ﺑوردون أﻧﺑوب ﺣاﻓﺔ زاحُﺗ2.5mmمﻘداره ضغط ﻋﻧد10 bar.ﻛاﻧت إذا مﻘداره ﻗطر ﺑﻧﺻف ﺑذراع موﺻﻠﺔ ﺑوردون أﻧﺑوب ﺣاﻓﺔ15mmاﻟمﻧاﺳﺑﺔ األﺳﻧان ﻋدد ﻧﺳﺑﺔ أﺣﺳب . اﻟد رﺑﻊ اﻟﺗرس ﺑينواﻟﺑﻧيون ائري.ھﻲ اﻟﻘياﺳيﺔ اﻟﺗروس ﻧﺳﺑﺔ ﻛاﻧت إذا30:1ﻗطر ﻧﺻف أوﺟد اﻟﺟديد اﻟذراع. الحل: ( بوردون أنبوبBourdon Tube): الكسب أو االنتقال عامل(G):𝑇. 𝑜 = اﻟمﺧرﺟات اﻟمدﺧالت = 2.5 10 = 0.25 𝑚𝑚/𝑏𝑎𝑟 ( والذراع الوصلةLink and Arm): x s tan أن بماθًاجد صغيرة قيمتها،فإن: x s tan rad s 15 ∴ θ = 𝑠 15 × 180 𝜋 = 3.82 𝑠 𝑑𝑒𝑔 االنتقال عامل أو الكسب: 𝐺 = 𝑜/𝑝 𝑖/𝑝 = 𝜃 𝑠 = 3.82 𝑠 𝑠 = 3.82 𝑑𝑒𝑔/ 𝑚𝑚 ( والتدريج المؤشرPointer and Scale): ( ﻋرض ﺟﮭاز ﻋن ﻋﺑارة وھوdisplay deviceﻓﻘط )،او اﻧﺗﻘاﻟه ﻋامل اﻋﺗﺑار يمﻛن ﻋﻠيه ﻟوﺣدة ًامﺳاوي ﻛﺳﺑه.
- 40. الكسب أو االنتقال عامل: 𝐺 = 𝑜/𝑝 𝑖/𝑝 = 1 رقمي كتلي بمخطط بوردون أنبوب جهاز تمثيل يمكن يلي فيما: ( ﻟﻠﺟﮭاز اﻟﻘياس ﻋامل أو ﺑﺣﺳاﺳيﺔ ﺗﺳمﻰ اﻟمدﺧالت إﻟﻰ ﻟﻠمﺧرﺟات اﻟﻛﻠيﺔ اﻟﻧﺳﺑﺔsensitivity or scale factor). للجهاز الكلية االنتقال دالة أو القياس عامل او الحساسية: 300 𝑜 10 𝑏𝑎𝑟 = 30 𝑑𝑒𝑔/ 𝑏𝑎𝑟 علﻰ للحصول بالحساسية ومساواتها عنصر لكل االنتقال عوامل ضرب يتمk: 0.25 𝑚𝑚 𝑏𝑎𝑟 × 3.82 𝑑𝑒𝑔. 𝑚𝑚 × 𝑘 × 1 = 30 𝑑𝑒𝑔. 𝑏𝑎𝑟 ∴ 𝑘 = 30 0.25 × 3.82 × 1 = 31.4 اﻟﻘياﺳيﺔ اﻟﺗروس ﻧﺳﺑﺔ ﻓان وھﻛذا30:1ًالﻗﻠي أﻗل مؤﺷر دورة ﺳﺗﻌطﻲ اﻧﮭا مﻊ مﻧاﺳﺑﺔ ﺳﺗﻛون ﻋن300ًْالﻗﻠي اﻟذراع ﻗطر ﻧﺻف ﺗﻘﺻير ﺳيﺗم اﻟوضﻊ ھذا وﻟﺗﺻﺣيح. البنيون ترس إلﻰ الدائري ربﻊ الترس أسنان عدد نسبة: 𝑇 𝑄 𝑇𝑝 = اﻟﺣﺳاﺳيﺔ ﺑوردون أﻧﺑوب اﻧﺗﻘال ﻋامل × واﻟذراع اﻟوﺻﻠﺔ اﻧﺗﻘال ﻋامل × واﻟﺗدريج اﻟمؤﺷر اﻧﺗﻘال ﻋامل 𝑘 = 30 0.25 × 𝜇 × 1 = 30 0.25 × 30𝜇 = 30 الجديد والذراع الوصلة انتقال عامل: 𝜇 = 1 0.25 = 4 𝑑𝑒𝑔./𝑚𝑚
- 41. ًاأيض: 𝜇 = 𝑜/𝑝 𝑖/𝑝 = 𝜃 𝑠 = 4 𝑑𝑒𝑔./𝑚𝑚 ∴ 𝜃 = 4 𝑠 أن ﺑما𝜃اﻋﺗﺑار ﻓيمﻛن ًاﺟد ﺻغيرة زاويﺔtan 𝜃 = 𝜃.ﻋن اﻟﺗﻌﺑير ًاأيض يمﻛن وﺑاﻟﺗاﻟﻲ𝜃 ﻛاآلﺗﻲ: 𝜃 = 𝑠 𝑥 × 180 𝑜 𝜋 = 4 𝑠 ∴ 4 𝑥 𝜋 = 180 𝑜 ∴ 𝑥 = 180 𝑜 4𝜋 = 14.3 𝑚𝑚 ∴= اﻟﺟديد اﻟذراع ﻗطر ﻧﺻف14.3 mm اإلجابة من للتأكد،مساوية أنها من والتأكد العناصر لجميﻊ االنتقال عوامل ضرب يتم للحساسية. 𝑐ℎ𝑒𝑐𝑘: 0.25 × 4 × 30 × = 30 𝑑𝑒𝑔./𝑏𝑎𝑟 ii( المانوميتر .Manometer): ﺣرف ﺷﻛل ﻓﻲ أﻧﺑوب ﻋن ﻋﺑارة ھوU( رﻗم اﻟﺷﻛل ﻓﻲ واضح ھو ﻛما3.4).ما ﻋادة وھو ﺣرف ﺷﻛل ﻓﻲ اﻻﻧﺑوب ارﺗفاع ﻧﺻف ﺣواﻟﻲ إﻟﻰ اﻟزئﺑق أو ﺑاﻟماء يمألUواضح األوﻟﻲ (اﻟمﺳﺗوى اﻟﺷﻛل ﻓﻲ)ﺗطﺑيق ﺗم إذاﺑمﻘدار ضغوط2Pو1Pاﻟمﺳﺗوى ﻓﻲ ﻓرق ﺳيﻧﺷأ األﻧﺑوب طرﻓﻲ إﻟﻰ ﺑمﻘدارh( اﻟضغط ﻓرق مﻊ ًاطردي يﺗﻧاﺳب𝑝1 − 𝑝2).األﻧﺑوب طرﻓﻲ أﺣد ﻛان إذاUإﻟﻰ ًامفﺗوﺣ اﻟﺟوي اﻟضغط2P،ﺑين اﻟضغط ﻓﻲ اﻟفرق يﻘيس اﻟماﻧوميﺗر ﻓإن1Pاﻟﺟوي واﻟضغط(i.e.يﻘيس ( اﻟﻘياس ضغطgauge pressureﻟـ )1p). ﺣرف ﺷﻛل ﻓﻲ اﻻﻧﺑوب ﺑاﺳﺗﺧدام ﻗياﺳه يﺗم اﻟذي اﻟضغط ﻓﻲ اﻟفرقUﺑاﻻرﺗفاع ﻋﻧه اﻟﺗﻌﺑير يﺗم ( اﻟمﻠيمﺗرىmm( ﻟﻠزئﺑق )𝐻𝑔( اﻟماء أو )𝐻2 𝑜اﺳﺗﺧدامه يﺗم اﻟذي اﻟﺳائل ﻋﻠﻰ ًامﻌﺗمد ).ﻋﻠيه :اﻟﺗاﻟيﺔ اﻟمﻌادﻟﺔ اﺳﺗﺧدام يمﻛن اﻟضغط ﻓﻲ اﻟفرق وﻟﻘياس اﻟﺟوي اﻟضغط × اﻟمﻌطﻰ اﻟمﺳﺗوى ﻓﻲ اﻟفرق اﻟﺟوي اﻟضغط ﻟﺗأﺛير ﻧﺗيﺟﺔ اﻟزئﺑق ارﺗفاع = اﻟﻘياس ضغط ( ﻟﻠماﻧوميﺗر اﻻﺳفل اﻟمﺳﺗوى ﻋﻧدx-x( رﻗم ﺷﻛل )3.4اﻟطرﻓين ﻓﻲ مﺗﺳاويﺔ اﻟضغوط ﺗﻛون )، .اﻟضغط ﻓﻲ اﻟفرق ﻋن ﻟﻠﺗﻌﺑير اﻟﺗاﻟيﺔ اﻟمﻌادﻟﺔ اﺳﺗﺧدام يمﻛن ﻋﻠيه
- 42. القياس ضغط: 𝑝1 − 𝑝2 = 𝜌𝑔ℎ ( رقم شكل3.4حرف شكل في معتدل أو قائم مانوميتر )∪ اﻟﻌمﻠيﺔ ﻟألﻏراض،( اﻟماﻧوميﺗر أﻧﺑوب ﻋﻠﻰ ﻗياﺳه يمﻛن اﻟذي األﻗﺻﻰ اﻟضغط ﻓإنUﺣواﻟﻲ ھو ) 1.5ﺟوي ضغط.اﻟزئﺑق وﻛميﺔ األﻧﺑوب طول ﻟزيادة ﻧﺣﺗاج ﻓإﻧﻧا اﻟﻘيمﺔ ھذه من أﻛﺑر ضغوط ﻋﻧد اﻟمطﻠوﺑﺔ. ( مثال2): ﺣرف ﺷﻛل ﻓﻲ أﻧﺑوبUاﻟﺟوي ﻟﻠضغط ًامﻌرض طرﻓيه أﺣد ويﻛون زئﺑق ﻋﻠﻰ يﺣﺗوي. iمﻘداره اﻟمﺳﺗوى ﻓﻲ ﻟفرق .28.5mmاآلﺗﻲ ِّدﺣد: 1.( اﻟﻘياس ضغطThe gauge pressure). 2.( اﻟمطﻠق اﻟضغطThe absolute pressure). ( اﻟﻘياس ﻟوﺣدات اﻟدوﻟيﺔ اﻟمﻧظومﺔ ﺑاﺳﺗﺧدامSI). ii(أ ﻟﻠﺳؤال إﺟاﺑﺗك من ﺗﺣﻘق .-1اﻟطريﻘﺔ ًامﺳﺗﺧدم ).اﻟﺑديﻠﺔ iii؟ اﻟضغط ﻧفس ﻋﻧد اﻟزئﺑق ﻋن ًﻻﺑد اﻟماء اﺳﺗﺧدمﻧا إذا اﻟمﺳﺗوى ﻓﻲ اﻟفرق ﺳيﻛون ﻛم . الحل: i.1اﻟﻘياس ضغط .: اﻟﺟوي اﻟضغط × اﻟمﻌطﻰ اﻟمﺳﺗوى ﻓﻲ اﻟفرق اﻟﺟوي اﻟضغط ﻟﺗأﺛير ﻧﺗيﺟﺔ اﻟزئﺑق ارﺗفاع = اﻟﻘياس ضغط 28.5 670 × 1.013 × 105 = 3798. 75 𝑁/ 𝑚2 ⋍ 3.8𝑘𝑁/𝑚2 𝑜𝑟 (𝑘𝑝𝑎) 2اﻟضغط .:اﻟمطﻠق اﻟمطﻠق اﻟضغط =اﻟﻘياس ضغط +اﻟﺟوي اﻟضغط 3.8 + 101.3 = 105.1 𝑘𝑁/ 𝑚2 ii= اﻟﻘياس ضغط .𝜌𝑔ℎ 13.6 × 103 × 9.81 × 0.0285 = 3800 𝑁/ 𝑚2 = 3.8𝑘𝑁/𝑚2 iii.اﺳﺗﺧدام ﺗم إذا اﻟمﻘاﺑل اﻟمﺳﺗوي ﻓﻲ اﻟفرق:اﻟماء ℎ 𝑤 = ℎ 𝑚 × 𝜌 𝑚 𝜌 𝑤 = 13.6 × 28.5 = 388 𝑚𝑚 𝐻2 𝑜
- 43. 3.حرف شكل في مانوميترUمليءالزئبق فوق بسائل: (U- Tube Manometer with Liquid above the Mercury) ﺣرف ﺷﻛل ﻓﻲ أﻧﺑوب اﺳﺗﺧدام يﺗم ﻋﻧدماUاﻟضغط ﻓرق ﻟذﻟك (مﺛال ﺳائل ضغط ﻓرق ﻟﻘياس وﻋﻧﻘه ﻓﻧﺷوري مﻘياس مﻘدمﺔ ﺑين.)ﺻﻧاﺑير ﺧالل اﻟﻧظام ﺧارج اﻟمﺣﺑوس اﻟﮭواء طرد يﺗم ما ﻋادة (bleed cocks( اﻟﺷﻛل ﻓﻲ واضح ھو ﻛما )3.5ﻓﻲ ﺑاﻟزئﺑق ًاﺗمام مﺗﺻل اﻟﺳائل يﻛون ﺣﺗﻰ ) األﻧﺑوب طرﻓﻲ. ( األدﻧﻰ اﻟمﺳﺗوى ﻋﻧدx-xاﻟضغط يﻛون )ﻓرق ﺣﺳاب يمﻛن وﻋﻠيه األﻧﺑوب طرﻓﻲ ﻋﻧد ًامﺗﺳاوي ﺑاﻟمﻌادﻟﺔ اﻟضغط: 𝑝1 − 𝑝2 = (13.6 − 𝑑) × 103 𝑔ℎ اﻟﺻيغﺔ ھذه ﻓﻲ13.6و ﻟﻠزئﺑق اﻟﻧﺳﺑيﺔ اﻟﻛﺛاﻓﺔ ھﻲdاﻟزئﺑق ﻓوق ﻟﻠﺳائل اﻟﻧﺳﺑيﺔ اﻟﻛﺛاﻓﺔ ھﻲ. ( رقم شكل3.5حرف شكل في مانوميتر )∪الزئبق فوق بسائل ( مثال3): ﺣرف ﺷﻛل ﻓﻲ ماﻧوميﺗر إﻟﻰ ﺗوﺻيﻠه يﺗم ﻓﻧﺷوري مﻘياسUزئﺑق ﻋﻠﻰ يﺣﺗوي،اﻟﻧظام ﻛان إذا .ﺑﺳائل ًامﻠيئ اﻟزئﺑق مﺳﺗوى ﻓﻲ اﻟفرق يﻛون ﻋﻧدما وﻋﻧﻘه اﻟفﻧﺷوري مدﺧل ﺑين اﻟضغط ﻓرق أﺣﺳب 170mm،:ھو اﻟزئﺑق ﻓوق اﻟموﺟود اﻟﺳائل ﻛان إذا اﻟماء .أ. ( اﻟﻛيروﺳين .بkeroseneﻧﺳ ﺑﻛﺛاﻓﺔ )مﻘدارھا ﺑيﺔ0.8. الحل: .أ 𝑝1 − 𝑝2 = (13.6 − 𝑑) × 103 𝑔ℎ = (13.6 − 1) × 103 × 9.81 × 0.17 = 21000 𝑁/𝑚2 = 21 𝑘𝑁/𝑚2 .ب 𝑝1 − 𝑝2 = (13.6 − 0.8) × 103 × 9.81 × 0.17 = 21300 𝑁/𝑚2 = 21.3 𝑘𝑁/𝑚2
- 44. 4( المائل المانوميتر .The Inclined Manometer): ﺻغيرة ضغوط ﻓروق ﻟﻘياس يﺳﺗﺧدم اﻟﻧوع ھذااﻟﺟوي اﻟضغط ﻋن ﺑﻛﺛير أﻗل.ھذه مﺛل ﻟﻘياس ﺣرف ﺷﻛل ﻓﻲ اﻟماﻧوميﺗر أﻧﺑوب ﻋﻠﻰ ًاﺟد اﻟﺻغيرة اﻟضغوطUاﻟﻌادي،ﻛﺳائل اﻟماء اﺳﺗﺧدام يﺟب اﻟماء من ﻛﺛاﻓﺔ أﻗل ﺧفيف زيت اﺳﺗﺧدام األﻓضل من أوﻹﻋطاءأﻧﺑوب ﻓﻲ اﻟمﺳﺗوى ﻓﻲ أﻛﺑر ًاﻓرﻗ U.ا ﻓﻲ اﻟﻘراءة ﻓﻲ ﻟﻠﺧطأ ﻛﺑير اﺣﺗمال ھﻧاﻟكواﻟﻘﺻور اﻟﺟاذﺑيﺔ ﻟﺗأﺛيرات ﻧﺗيﺟﺔ اﻟﻌادي ﻟماﻧوميﺗر واﻻﻟﺗﺻاق اﻟﺗماﺳك وﻗوى اﻟذاﺗﻲ.ﺑاﺳﺗماﻟﺔ يﺗم وذﻟك اﻟﺧطأ ھذا ﺑﺗﺧفيض يﻘوم اﻟماﻧوميﺗر ﻓإن ﻋﻠيه ﺻغيرة ﺑزاويﺔ أطراﻓه أﺣد∝اﻟﺗدريج ﻓﻲ اﻟﺗﻘﺳيمات ﺗوزيﻊ ھو ذﻟك ﺗأﺛير ويﻛون ﻟألﻓﻘﻲ ﺑاﻟﻧﺳﺑﺔ األﻧﺑوب ﺟاﻧب ﻋﻠﻰ.ﻛل ﻓإن ﻋﻠيه(mmﻓﻲ ضرﺑﮭا يﺟب اﻟمﻘياس من )∝cosec.ﻋن وماذا مﻘطﻊ ﺑﺗوﺳيﻊ يﺗم وھذا اﻻمﻛان ﺑﻘدر ًاﺛاﺑﺗ اﻟﺟاﻧب ھذا ﻓﻲ اﻟمﺳﺗوى يﻛون أن يﺟب ؟ اآلﺧر اﻟطرف األﻧﺑوب.ﻓﻲ ﺗﺗﺳﺑب اﻟمائل اﻟطرف ﻓﻲ ﻟﻠمﻘياس ﻛامل ﻻﻧﺣراف اﻟمطﻠوﺑﺔ اﻟﺳائل إزاﺣﺔ ﻓإن ﻋﻠيه اﻟ ﻓﻲ ﺗﺟاھﻠه يمﻛن اﻟمﺳﺗوى ﻓﻲ ﺗغييرﻋاﻟيﺔ ﺣﺳاﺳيﺔ ذات اﻟماﻧوميﺗر ﻗراءة ان ﺑما .اﻟواﺳﻊ طرف اﻟزاويﺔ ﻓﻲ ﺗغيير ألي∝( ﻛﺣول أو ماء ميزان ﻋﻠﻰ اﻟﺟﮭاز ﺣمل يﺗم ما ﻋادة ﻓإﻧهspirit level) .اﻻﺳﺗﺧدام ﻗﺑل ﺑدﻗﺔ ضﺑطه يﺗم ﺣﺗﻰ ( رﻗم اﻟﺷﻛل3.6مائل أﻧﺑوﺑﻲ ماﻧوميﺗر يوضح أدﻧاه ). ( رقم شكل3.6مانوميتر )مائل أنبوبي ( مثال4): ماء ﻋﻠﻰ يﺣﺗوي مائل ماﻧوميﺗر،مﻘدارھا ﺑزاويﺔ مائل طرﻓيه اﺣد8ْاألﻓﻘﻲ ﻋﻠﻰ.اﻟﻘطر يﻛون ﻟـ ٍومﺳا اﻟمائل ﻟﻠطرف اﻟداﺧﻠﻲ2.5 mm،اﻟواﺳﻊ وﻟﻠطرف38mm.اﻟﺟﮭاز ﻗياس مدى يﻛون وﺣﺗﻰ ﺻفر من40𝑚𝑚𝐻2 𝑜. اﻟﺗدريج مﻘياس طول ِّدﺣد .أ،طو ﻋﻠﻰ ﺗﺣﺻل ومﻧهل1mmاﻟﺗدريج ﺗﻘﺳيم من. مﻘدارھا ﺑدﻗﺔ ﻗراءﺗه يمﻛن اﻟمﻘياس أن اﻓﺗرض .ب± 0.5mm)اﻟفﻌﻠﻲ اﻟطول (من،أﻗﺻﻰ ِّدﺣد يﻌادل ضغط ﻗياس يﺗم ﻋﻧدما ﺧطأ ﻧﺳﺑﺔ10 𝑚𝑚𝐻2 𝑜. iﻋادي ماﻧوميﺗر ﻋﻠﻰ .. iiماﻧوميﺗر ﻋﻠﻰ ..مائل ﻋﻠﻰ ﻟﻠﺣﺻول اﻟواﺳﻊ اﻟطرف ﻓﻲ اﻟمﺳﺗوى ﻓﻲ اﻟﺗغير ِّدﺣد .جاﻟﺗدريج ﻟمﻘياس اﻧﺣراف أﻗﺻﻰ.
- 45. الحل: ( رﻗم ﻟﻠﺷﻛل ﺑاﻟرﺟوع3.6ﻓﻲ ﺗوضيﺣﮭا يﺗم اﻟرأﺳﻲ واﻻرﺗفاع اﻟمﻘياس طول ﺑين اﻟﻌالﻗﺔ ﻓإن ) أدﻧاه اﻟﺷﻛل: ℎ 𝐿 = sin 𝛼 𝐿 = ℎ sin 𝛼 = 40 sin 8 𝑜 = 287 𝑚𝑚 طول ﻓإن وﻋﻠيه1𝑚𝑚يﻌادل اﻟرأﺳﻲ اﻻرﺗفاع من7.19𝑚𝑚 = 287 40 اﻟمائل اﻻرﺗفاع منأو اﻟﺗدريج مﻘياس. .بiﻋادي ﻧوميﺗر ما ﻋﻠﻰ ﻟﻠﺧطأ اﻟﻘﺻوى اﻟمئويﺔ اﻟﻧﺳﺑﺔ .: 0.5𝑚𝑚 10𝑚𝑚 × 100% = 5% iiماﻧوميﺗر ﻋﻠﻰ ﻟﻠﺧطأ اﻟمئويﺔ اﻟﻧﺳﺑﺔ .:مائل 0.5𝑚𝑚 10 × 7.19𝑚𝑚 × 100% = 0.7% ج.اﻟمائل ﻟﻠطرف اﻟداﺧﻠﻲ اﻟمﻘطﻊ مﺳاﺣﺔ: 𝐴𝑖 = 𝜋 4 × 2.52 = 4.91 𝑚𝑚2 اﻟمﺣﺗوي اﻟﺳائل ﺣﺟم( ﻟﻠﺗدريج ﻗراءة ﺑين0( و )40): = 287 × 4.91 = 1411 𝑚𝑚3 اﻟواﺳﻊ ﻟﻠطرف اﻟداﺧﻠﻲ اﻟمﻘطﻊ مﺳاﺣﺔ: 𝐴 𝑒 = 𝜋 4 × 382 = 1134 𝑚𝑚2 اﻟواﺳﻊ اﻟطرف ﻓﻲ اﻟمﺳﺗوى ﻓﻲ اﻟﺗغير ﻓإن وﻋﻠيهﻹﻋطاءﻟﻠﺗدريج ﻗراءة أﻗﺻﻰ: 1411 1134 = 1.24 𝑚𝑚 مﻘداره ضغط ﻗراءة أن يﻌﻧﻲ وھذا40𝑚𝑚𝐻2 𝑜ﺣﻘيﻘﺔ ھو اﻟﺗدريج مﻘياس ﻋﻠﻰ41.24mm = 1.24 + 40. اﻟﺗاﻟﻲ اﻟﻧﺣو ﻋﻠﻰ ﺗﻘﺻيرھا يﺟب اﻟمﻘياس ﻋﻠﻰ اﻟمﻠيميﺗريﺔ اﻟﺗﻘﺳيمات ﻓإن اﻟوضﻊ ھذا وﻟﺗﺻﺣيح: 7.19 × 40 41.24 = 6.97 𝑚𝑚 طول ﻋﻠﻰ مﺑاﺷرة ﻟﻠﺣﺻول اﻟﺗاﻟيﺔ اﻟﺻيغﺔ اﺳﺗﺧدام ويمﻛن1mmاﻟﺗدريج مﻘياس ﻓﻲ:
- 46. اﻟمائل اﻟمﻘياس من { 1 (𝐴𝑖/𝐴 𝑒) + 𝑠𝑖𝑛𝛼 𝑚𝑚} = اﻟراﺳﻲ اﻟمﻘياس من 1𝑚𝑚 طول :ﺣيث𝐴𝑖اﻟمائل اﻟطرف مﻘطﻊ مﺳاﺣﺔ =. 𝐴 𝑒اﻟواﺳﻊ اﻟطرف مﻘطﻊ مﺳاﺣﺔ =. طول1𝑚𝑚اﻟرأﺳﻲ اﻟمﻘياس من: 1 4.91/1134 + 𝑠𝑖𝑛8 = 6.97 𝑚𝑚 ( مثال5): يﻌادل ھواء ضغط ﻓرق ﻟﻘياس يﺳﺗﺧدم مائل ماﻧوميﺗر3𝑚𝑚مﻘدارھا ﺑدﻗﺔ اﻟماء من± 3%. اﻟمائل ﻟﻠطرف اﻟداﺧﻠﻲ اﻟﻘطر يﻛون8𝑚𝑚اﻟواﺳﻊ وﻟﻠطرف24𝑚𝑚.اﻟماﻧوميﺗري اﻟمائﻊ ﻛﺛاﻓﺔ 740𝑘𝑔/𝑚3 .اﻟزاويﺔ أوﺟداﻟﺗﻲاﻟمطﻠوﺑﺔ اﻟدﻗﺔ ﻟﺗﺣﻘيق األﻓﻘﻲ اﻻﺣداﺛﻲ مﻊ اﻟمائل اﻟطرف يﺻﻧﻌﮭا مﻘداره أﻗﺻﻰ ﺑﺧطأ ﻗراءﺗه يمﻛن اﻟﺗدريج أن ﺑاﻓﺗراض± 0.5mm. الحل: ﻛماء اﻟمﻘاس اﻟﮭواء ضغط ﻓرق،ℎ 𝑤، ℎ 𝑤 = 3𝑚𝑚 𝐻2 𝑜 = اﻟﻘياس دﻗﺔ±3% 𝑑𝑖 = 8 𝑚𝑚 𝑑 𝑒 = 24 𝑚𝑚 𝜌 𝑚 = 740 𝑘𝑔/𝑚3 أوﺟد:∝ = ? = اﻟﺗدريج ﻗراءة ﻓﻲ اﻟﺧطأ± 0.5𝑚𝑚 اﻟماﻧوميﺗري ﻟﻠﺳائل ﺑاﻟﻧﺳﺑﺔ اﻟمﻘاس اﻟﮭواء ضغط ﻓرق، ℎ 𝑚 = ℎ 𝑤 × 𝜌 𝑤 𝜌 𝑚 = 3 × 1000 740 = 4.054 𝑚𝑚 أجعل𝟏𝒎𝒎ال المقياس منقائمتمثل𝒙 𝒎𝒎منالال مقياس( مائلال مقياستدريج) ﻟﻠﺧطأ اﻟمئويﺔ اﻟﻧﺳﺑﺔ: 0.5 4.054 𝑥 × 100% = 3% 4.054 × 3 𝑥 = 50 ∴ 𝑥 = 50 3 × 4.054 = 4.11 𝑚𝑚 طول𝟏𝒎𝒎الراسي المقياس من≡ { 𝟏 (𝑨 𝒊/𝑨 𝒆) +𝐬𝐢𝐧 𝜶 𝒎𝒎}المائل المقياس من 4.11 = 1 (82/242) + sin 𝛼
- 47. 4.11 = 1 (1/3)2 + sin 𝛼 4.11 × (1/3)2 + 4.11 sin 𝛼 = 1 sin 𝛼 = 1 − 4.11 × (1/3)2 4.11 = 0.1322 ∴ 𝛼 = 𝑠𝑖𝑛−1 0.1322 = 7.597 𝑜 = 7 𝑜 35′ 48.3′′ ⋍ 7 𝑜 36′ 3.3.2المقاومة التِّمحو:(Resistance Transducers): اﻟﺧاﺻيﺔ ﻓﻲ اﻟﺗغير ﺑﺗﺣويل اﻟمﻘاومﺔ مﺣوﻻت ﺗﻘوماﻟﻛﮭرﺑيﺔ اﻟمﻘاومﺔ ﻓﻲ ﺗغير إﻟﻰ ﻗياﺳﮭا اﻟمراد. مﺣوﻻت ﻓإن مﻘاومﺔ ﺧالل ﺗيار ﺑﺗمرير ﻓﻘط إيﺟاده يمﻛن اﻟﻛﮭرﺑيﺔ اﻟمﻘاومﺔ ﻓﻲ اﻟﺗغير ان وﺑما ﻛﮭرﺑيﺔ ﻗدرة مﺻدر إﻟﻰ ًادائم ﺗﺣﺗاج اﻟمﻘاومﺔ. ﺗﮭيئ إﺷارة ﺗﺻميم يمﻛن ﺑﺣيث ﺗيار أو ﺟﮭد ھو ًادائم ﺧرﺟﮭا ان اﻟطريﻘﺔ ھذه مميزات ومنﺗﮭا ﺑمروﻧﺔ. المقاومة محوالت من نوعان هنالك: 1.( اﻟميﻛاﻧيﻛﻲ اﻻﻧفﻌال ﻟﻘياس اﻟمﻘاومﺔ مﺣوﻻتi.e.)اﻻﻧفﻌال مﻘاييس. 2.( اﻟﺣرارة درﺟﺔ ﻟﻘياس اﻟمﻘاومﺔ مﺣوﻻتi.e.ﺛيراﻟمﻘاومﺔ موميﺗر واﻟﺛيرمﺳﺗور.) 3. 1االنﻔعال لقياس المقاومة محوالت .: ( االنﻔعال مقاييسStrain Gauges): ﺑﺣيث مﻘطﻌه مﺳاﺣﺔ وﺗﻘل ﺳيزيد طوﻟه ﻓإن ﺷد ﻗوة إﻟﻰ ﻛﮭرﺑائﻲ ل ِّموﺻ ﺗﻌريض يﺗم ﻋﻧدما ًارﻓيﻌ يﺻﺑح.اﻟﻛﮭرﺑيﺔ اﻟموﺻل مﻘاومﺔ ﻓﻲ ﺑﺳيطﺔ زيادة ﻓﻲ ﺗﺗﺳﺑب اﻟﺗأﺛيرات ھذه.مﺑدأ ھو وھذا اﻻﻧفﻌال مﻘياس ﺗﺷغيل. الع شجرة حسب بينها االختالفات تصنيف يمكن االنﻔعال عديدة أنواع هنالكأدناه الموضحة ائلة:
- 48. أ.المترابط غير االنﻔعال مقياس(Unbounded Strain Gauge): اﻟﻌازﻟﺔ األوﺗاد من طﻘمين ﺑين موﺻﻠﺔ ﺧيوط ﺷﻛل ﻓﻲ ﻧاﻋمﺔ ﺗوﺻيل أﺳالك من يﺗﻛون (insulating pegs( رﻗم اﻟﺷﻛل ﻓﻲ واضح ھو ﻛما )3.7أدﻧاه ): ( رقم شكل3.7انﻔ مقياس )عمترابط غير ال ﺗﺑاﻋداﻟﻧﻘطﺗانAوBاﻟمﻘاومﺔ ﺳﻠك ﻓﻲ ﺷد اﻧفﻌال ﻓﻲ يﺗﺳﺑب اﻟﺷد ﻟﻘوى ﻧﺗيﺟﺔ،زيادة وﺑاﻟﺗاﻟﻲ مﻘاومﺗه. ب.( المترابط االنﻔعال مقياسBonded Strain Gauge): اﻟﺧاص اﻻﺳﺗﺧدام ذات اﻟطاﻗﺔ مﺣوﻻت من ًاﺟد ﻗﻠيﻠﺔ ﺣاﻻت ﺑاﺳﺗﺛﻧاء،اﻻﻧفﻌال مﻘاييس ﻛل ﻓإن أﻧﮭا ﺑمﻌﻧﻰ مﺗراﺑطﺔ مﻘاييس ھﻲاﻟمراد اﻟﺟزء أو اﻟماﻛيﻧﺔ إﻟﻰ مﻧاﺳب ﻻﺻق ﺑواﺳطﺔ ﺑﺻالدة مﺛﺑﺗﺔ ﻓيه اﻻﻧفﻌال ﻗياس.اﻟمادة ﻟه ﺗﺗﻌرض اﻟذي اﻟميﻛاﻧيﻛﻲ اﻻﻧفﻌال ﻟﻧفس يﺗﻌرض اﻟموﺻل يﺟﻌل وھذا ﻋﻠيﮭا اﻟمﻠﺻق.ﺑﻧفس اﻻﻧضغاط اﻧفﻌال يﻘيس يﺟﻌﻠه ﻟالﻧفﻌال اﻟمﺗﻌرضﺔ اﻟمادة ﻋﻠﻰ اﻟمﻘياس رﺑط اﻟﺷد اﻧفﻌال ﺑه يﻘيس اﻟذي اﻟمﺳﺗوى.اﻻﻧضغاط اﻧفﻌال ﻓإن اﻟمادة مﻘاومﺔ يزيد اﻟﺷد اﻧفﻌال أن وﺣيث ِّيﺧفاﻟمادة مﻘاومﺔ ض.ﻓﻲ واضح ھو ﻛما اﻟمﺗراﺑطﺔ اﻻﻧفﻌال ﻟمﻘاييس رئيﺳيﺔ أﻧواع ﺛالﺛﺔ ھﻧاﻟك اﻟمﺣور اﺗﺟاه ﻓﻲ اﻻﻧفﻌال ﻗياس ﻓﻲ ﻋاﻟيﺔ ﺣﺳاﺳيﺔ ذات وﺟميﻌﮭا اﻟﺗاﻟيﺔ األﺷﻛال𝑌 − 𝑌ﻋدم وذات اﻟمﺣور اﺗﺟاه ﻓﻲ اﻻﻧفﻌال ﻟﻘياس ﺣﺳاﺳيﺔ𝑋 − 𝑋. ب.1.( الملﻔوف االنﻔعال مقياسWrap- Around Gauge): (رﻗم اﻟﺷﻛل3.8مﻠفوف اﻧفﻌال ﻟمﻘياس ًارﺳم يوضح أدﻧاه ). ﻧﺟد اﻟﻧوع ھذا ﻓﻲ( ﺣﺔَّﺳطُم رﻓيﻌﺔ مﻘواه ورﻗﺔ ﺣول مﻠفوف اﻻﻧفﻌال مﻘياس ﺳﻠك أنthin flat cardﺷﻛل ﻓﻲ اﻟرﻓيﻊ اﻟﺑالﺳﺗيك أو اﻟورق من ﻟوﺣين يغطيﮭا )ﺳاﻧدويﺗش.
- 49. ( رقم شكل3.8الملﻔوف االنﻔعال مقياس ) ب.2.( المسطحة الشبكة مقياسFlat Grid Gauge): ( رﻗم اﻟﺷﻛل3.9مﻘياس يوضح أدﻧاه )مﺳطﺣﺔ ﺳﻠك ﺷﺑﻛﺔ ذو اﻧفﻌال. ( طيه يﺗم اﻻﻧفﻌال مﻘياس ﺳﻠك أن ﻧﺟد اﻟﻧوع ھذا ﻓﻲfoldedﺗﻛون ﺑﺣيث واﺣد مﺳﺗوى ﻓﻲ ) اﻟﺑﻌض ﺑﻌضﮭا ﺑﺟاﻧب مﺗمددة أطوال ھﻧاﻟك.يوضﻊ اﻟﺳﻠك ﻓإن اﻟمﻠفوف اﻻﻧفﻌال مﻘياس ومﺛل ﻛﺳاﻧدويﺗش.اﻟرﻓيﻊ اﻟﺑالﺳﺗيك أو اﻟورق ﺑين ( رقم شكل3.9مقياس )المسطحة السلك شبكة ذو االنﻔعال ب.3الشريحة مقياس .(The Foil Gauge): ( رﻗم اﻟﺷﻛل3.10ﺷريﺣﺔ ﻟمﻘياس ًارﺳم يوضح أدﻧاه ).مﺗﻌرج ﻧمط ذو موﺻل من يﺗﻛون وھو مﺷرﺷر او رﻓيﻌﺔ ﺑالﺳﺗيﻛيﺔ ﻟوﺣﺔ ﻗاﻋدة ﻋﻠﻰ ويوضﻊ رﻓيﻌﺔ مﻌدﻧيﺔ ﺷريﺣﺔ من اﺳﺗﺧالﺻه يﺗم. اﻟﺷﻛل ھو اﻟﺳﻠك مﻘياساآلن ﺣﺗﻰ ﺑﻛﺛرة ويﺳﺗﺧدم اﻻﻧفﻌال ﻟمﻘياس األﺻﻠﻲ.يﺳﺗﻌاض ﺑدأ وﻟﻛن اﻟﺗﺻاق ويﻌطﻲ ﻟﻠموﺻل أﻓضل مﻘطﻊ مﺳاﺣﺔ إﻟﻰ ﻋرض ﻧﺳﺑﺔ يﻌطﻲ اﻟذي اﻟﺷريﺣﺔ ﺑمﻘياس ﻋﻧه اﻓضل ﺣرارة وﻓﻘدان. ( رقم شكل3.10)–الشريحة ذو االنﻔعال مقياس ﻓيﮭا اﻻﻧفﻌال ﻗياس اﻟمراد اﻟﻘطﻌﺔ ﺷد يﺗم ﻋﻧدماًاﺟاﻧﺑي مﻘطﻌﮭا ﺳيﻧﺧفض،(i.e.ﻟﮭا أن يﻌﻧﻲ ھذا ﺣواﻟﻲ مﻘداره ﺳاﻟب اﻧفﻌال0.3ﺣيث اﻟموﺟب اﻟطوﻟﻲ اﻻﻧفﻌال من0.3ﺑواﺳون ﻧﺳﺑﺔ ھﻲ.) ﻋﻠﻰ اﻟﺣﺻول يﺗم( ﺑواﺳون ﻧﺳﺑﺔPoisson's ratio)اﻟﺗاﻟﻲ اﻟﻧﺣو ﻋﻠﻰ:
- 50. 𝜈 = اﻟﻌرضﻲ اﻻﻧفﻌال اﻟطوﻟﻲ اﻻﻧفﻌال = −𝜖 𝑥 𝜖 𝑦 ﺣيث:𝜖 𝑥اﻻﻧفﻌال ھوو اﻟﻌرضﻲ𝜖 𝑦اﻟطوﻟﻲ اﻻﻧفﻌال ھو. اﻟﺳاﻟب اﻟﻌرضﻲ اﻻﻧفﻌال ﻟﮭذا ﻧﺗيﺟﺔ اﻟمﻘاومﺔ ﻓﻲ ﺗغير من اﻻﻧفﻌال ﻟمﻘياس اﻟﺣﻠﻘيﺔ اﻟﻧﮭايﺔ ﺗﻌاﻧﻲ اﻻﻧفﻌال وﺑاﻟﺗاﻟﻲ اﻟمﻘاومﺔ ﻗراءة ﻓﻲ ﺧطأ مﺳﺑﺑﺔ ﻋﻠيﮭا اﻻﺧﺗﺑار إﺟراء اﻟمراد اﻟﻘطﻌﺔ ﻓﻲ.اﻟﺗأﺛير ھذا ( اﻟﻌرضيﺔ ﺑاﻟﺣﺳاﺳيﺔ يﺳمﻰcross sensitivity).ﺗرك ﺑمﻛان اﻟﺳﮭوﻟﺔ من اﻟﺷريﺣﺔ مﻘاييس ﻓﻲ ﻛﺑيرة ﺑﺻورة اﻟﻌرضيﺔ اﻟﺣﺳاﺳيﺔ ﻟﺗﻘﻠيل واﺳﻌﺔ ﺣﻠﻘيﺔ ﻧﮭايات. اﻟﺷريﺣﺔ أو اﻟﺳﻠك ﻋﻧﺻر ﻓﻲ اﻻﻧفﻌال ﻟﺗغير ﻧﺗيﺟﺔ اﻟمﺗراﺑط اﻻﻧفﻌال مﻘياس مﻘاومﺔ ﺗﺗغير،وﺑما اﻟمادة ﻓﻲ اﻻﻧفﻌال ﻟﻘياس ﻧﮭدف أﻧﻧااﻟﺗﻲﻋﻠيه اﻻﻧفﻌال مﻘياس ﻋﻠيﮭا يﻠﺻق،يﺟب اﻟمﻘياس اﻧفﻌال ﻓإن اﻟمادة اﻧفﻌال من اﻻمﻛان ﺑﻘدر ًاﻗريﺑ يﻛون أن،ورﻗﺔ ﻗطﻌﺔ ﻛان إذا اﻟمﻘياس ﻏالف ﻓإن ھذا وﻟﻌمل اﻟمادة من ًاﻗريﺑ ﻟﺻﻘه يﺟب ﺑالﺳﺗيك أو.ًاﺟد ﺳميﻛﺔ اﻟالﺻﻘﺔ اﻟمادة ﻛاﻧت إذا،اﻟمﻘياس اﻧفﻌال ﻓإن ا من َّلأﻗ ﺳيﻛونﻋﻠيﮭا اﻟمﻠﺻق اﻟمادة ﻧفﻌال.رﻗم اﻟﺷﻛل(3.11).مﺗراﺑط اﻧفﻌال مﻘياس ُوضحي أدﻧاه ( رقم شكل3.11مترابط انﻔعال لمقياس عرضي مقطﻊ ) اﻟمﺧﺗﻠفﺔ األﺳطح ﻋﻠﻰ اﻟمﺧﺗﻠفﺔ اﻟﺗغﻠيف مواد ﻟرﺑط اﻟمﺗوﻓرة اﻟالﺻﻘﺔ اﻟمواد من اﻟﻌديد ھﻧاﻟك. ﻋﻠيه،ﺣاﻟﺔ ﻛل ﻓﻲ اﻟمﻧﺗج ارﺷادات ﺑاﺗﺑاع ًادائم يﻧﺻح.ﺣال أي ﻋﻠﻰ،اﻟﻌامﺔ األﺣﻛام ﺗطﺑيق يمﻛن :اﻟﺗاﻟيﺔ i.اﻟمادة ﻧظفاﻟﺗﻲﻋﻠيﮭا اﻟمﻘياس رﺑط يﺗم،األﻛاﺳيد من ﺣرة ﺗﻛون ﺑﺣيث،أو اﻟﺷﺣم .مﻠوﺛﺔ مادة أي ii.مﻧاﺳﺑﺔ ﻧظاﻓﺔ مﺣاﻟيل ﺑاﺳﺗﺧدام رﺑطه يﺗم اﻟذي اﻟمﻘياس ﺳطح ﻧظف. iii.اﻟمادة وزعاﻟمادة ﻋﻠﻰ ﺑاﻧﺗظام اﻟالﺻﻘﺔ،ﺑﻘوة واضغط ،اﻟمادة ﻋﻠﻰ اﻟمﻘياس ضﻊ اﻟمﺣﺑوﺳﺔ اﻟﮭواء ﻓﻘاﻋات ﻟطرد اﻟمﻧاﺳب اﻟوضﻊ ﻓﻲ،( اﻟمﻘياس مﺣاذاة من وﺗأﻛدcheck the gauge for alignment). iv.اﻟوﺻالت ﻟﺣام ﻗﺑل ًاﺗمام يﺟف ﺣﺗﻰ مﻧاﺳﺑﺔ ﻓﺗرة اﻟالﺻق أﺗرك. v.اﻟالﺻق يﺟف ﻋﻧدما،ﺑغ اﻟﺟو من اﺣميهﺗوﺻيﺔ ﺣﺳب مﻧاﺳب طاء اﻟمﺻﻧﻊ. ًاﻛﺑير اﻟالﺻق ﺳمك ﻛان إذا األﺧطاء ﺗﺣدث أن يمﻛن،اﻟﺗمدد مﻌدﻻت ﻟﺗفاوت ﻧﺗيﺟﺔ ًاوأيض اﻟﺣرارة درﺟات ﺑاﺧﺗالف واﻟمﻘياس ﻟﻠمادة اﻟﺣراري.مادة ﺳﺗﺗمدد اﻟﺣرارة درﺟﺔ زادت إذا ﻛمﺛال اﻟمادة من أﻛﺑر ﺑﺻورة اﻟمﻘياس،مرﺑوطﺔ ألﻧﮭا يﺣدث ﻟن ھذا وﻟﻛنﺳيﻧﺗج وﻟﻛن اﻟمادة إﻟﻰ ًاﺗمام
- 51. اﻟمﻘياس ﻓﻲ اﻧضغاط اﻧفﻌال ذﻟك ﻋنمﻌامالت واءمﺔُم ھﻲ ذﻟك ﻟﺗﺧفيض اﻟمﺗﺑﻌﺔ اﻟوﺳائل إﺣدى . واﻟمادة ﻟﻠمﻘياس اﻟﺣراري اﻟﺗمدد. الموصالت شبه انﻔعال مقاييس(Semi- Conductor Strain Gauges): اﻻﻧفﻌال ﻟمﻘاييس ﺣديﺛﺔ إضاﻓﺔ وھﻲ.اﻟﺟرماﻧيوم من ﺑﻠورة ﻋن ﻋﺑارة ھو لَّﺻاﻟمو (Germanium( اﻟﺳﻠيﻛون او )Siliconﺣﺳاﺳيﺔ ذات مﻘاومﺗﮭا ﻟﺟﻌل ﺑاﻟﺷوائب مﻌاﻟﺟﺗﮭا يﺗم ) ﻟالﻧفﻌال ﻋاﻟيﺔ.وﻟذﻟك اﻟﻌاديﺔ اﻻﻧفﻌال ﺑمﻘاييس مﻘارﻧﺔ مرة مائﺔ ﺣواﻟﻲ ھﻲ اﻟمﻘاييس ھذه وﺣﺳاﺳيﺔ ﺟد اﻟﺻغيرة اﻻﻧفﻌاﻻت ﻟﻘياس ﺗﺳﺗﺧدم ﻓإﻧﮭاًا. االنﻔعال حساب: اﻻﻏريﻘﻲ ﺑاﻟرمز ﻟه ُرمزي واﻟذي اﻟميﻛاﻧيﻛﻲ اﻻﻧفﻌال𝜖ﻛاآلﺗﻲ ﺣﺳاﺑه يﺗم: 𝜖 𝑚𝑒𝑐ℎ. = 𝛿𝐿 𝐿 ﺣيث:𝛿𝐿و اﻻﺳﺗطاﻟﺔ ھﻲ𝐿األﺻﻠﻲ اﻟطول ھو. ﻛاآلﺗﻲ اﻟمﻧاظر اﻟﻛﮭرﺑائﻲ اﻻﻧفﻌال ﺣﺳاب ويمﻛن: 𝜖 𝑒𝑙𝑒𝑐. = 𝛿𝑅 𝑅 ﺣيث:𝛿𝑅اﻟمﻘاومﺔ ﻓﻲ اﻟزيادة ھﻲو𝑅األﺻﻠيﺔ اﻟمﻘاومﺔ ھﻲ. اﻟميﻛاﻧيﻛﻲ اﻻﻧفﻌال مﻊ ًاطردي ًاﺗﻧاﺳﺑ اﻻﻧفﻌال ﻟمﻘياس اﻟﻛﮭرﺑائﻲ اﻻﻧفﻌال يﺗﻧاﺳب: 𝛿𝑅 𝑅 ∝ 𝜖 𝑚𝑒𝑐ℎ. 𝛿𝑅 𝑅 = 𝐾𝜖 → ∗ اﻟمﻌادﻟﺔ إن ﺣيث∗ميﻛاﻧيﻛﻲ اﻧفﻌال إﻟﻰ اﻟﻛﮭرﺑائﻲ اﻻﻧفﻌال ﻟﺗﺣويل األﺳاﺳيﺔ اﻟمﻌادﻟﺔ ھﻲ.ﺣيث Kاﻟمﻘياس ﻋامل ًاايض ﻋﻠيه ويطﻠق واﻟميﻛاﻧيﻛﻲ اﻟﻛﮭرﺑائﻲ اﻻﻧفﻌاﻟين ﺑين ﻟﻠﻌالﻗﺔ اﻟﺗﻧاﺳب ﺛاﺑت ھو (scale factorاﺧﺗﺑارات من اﻻﻧفﻌال مﻘياس ﻌﻲِّﺻﻧُم ﺑواﺳطﺔ ﺗﺣديده ويﺗم .اﻻﻧفﻌال ﻟمﻘياس ) ﺧاص ﻟمﻘياس اﻟﻧماذج.اﻟﻘيمﺔ يﺣمل ما ًاﻏاﻟﺑ وھو2،ﺷﺑ اﻧفﻌال مﻘاييس ﺣاﻟﺔ ﻓﻲ إﻻاﻟموﺻالت ه اﻟﺗﻲ( ﺑين اﻟمدى ﻓﻲ مﻘياس ﻋامل ﻟديﮭا100-300).ﻟﻠﺗمدد ﺑاﻟﻧﺳﺑﺔ ﻧفﺳﮭا ھﻲ اﻟمﻘياس ﻋوامل ﺗﻛون واﻻﻧﻛماش. ( مثال6): إﻟﻰ ﺗﺛﺑيﺗه يﺗم اﻧفﻌال مﻘياسﺳيﺧه( رﻗم اﻟﺷﻛل ﻓﻲ واضح ھو ﻛما اﻟمﻘطﻊ مﺳﺗطيﻠﺔ3.12أدﻧاه ). ھﻲ اﻻﻧفﻌال مﻘياس مﻘاومﺔ120.27مﻘياﺳه وﻋامل أوم2.1.اﻟﺳيﺧ مﻘطﻊ أﺑﻌاد ﺗﻛونه6mm ×25mm،اﻟﺳيﺧ ﻟمادة اﻟمروﻧﺔ مﻌاير ويﻛونهﻟـ مﺳاو200GN/m2. اﻟﺳيﺧ ﺗﻌريض ﺗم إذاه( ﺷد ﻟﺣملFإﻟﻰ ﺗﺗغير اﻻﻧفﻌال مﻘياس مﻘاومﺔ ﻓإن )120.42أوﺟد .أوم: iاﻻﻧفﻌال .اﻟﺳيﺧ مادة ﻓﻲه. iiاﻻﺟﮭاد .مادة ﻓﻲ.اﻟﺳيﺧه
- 52. iiiﻗيمﺔ ..اﻟﺣمل شكل( رقم3.12) الحل: i.المقاومة في التغير،δ R: 𝛿𝑅 = 120.42 − 120.27 = 0.15 Ω 𝛿𝑅 𝑅 = 𝐾𝜖 0.15 120.27 = 2.1 𝜖 ∴ 𝜖 = 0.15 120.27 × 2.1 = 0.000594 (ﺑﻌديﺔ ﻻ )ﻗيمﺔ 594 𝑚𝑖𝑐𝑟𝑜𝑠𝑡𝑟𝑎𝑖𝑛 = 594 × 10−6 أو ﺑﻌديﺔ ﻻ ﻗيمﺔ ﻋن ﻋﺑارة وھﻲ. ii.:أوجدσ =?: اﻟمروﻧﺔ مﻌاير، 𝐸 = 𝜎 𝜖 ∴ 𝜎 = 𝜖 𝐸 = 594 × 10−6 × 200 × 109 = 118.8 × 106 𝑁/ 𝑚2 = 118.8 𝑀𝑁/𝑚2 = 118.8 𝑁/𝑚𝑚2 iii.F =?: ،اﻹﺟﮭاد σ = 𝐹 𝐴 = اﻟﺣمل اﻟﺣمل مﻊ اﻟمﺗﻌامد اﻟمﻘطﻊ مﺳاﺣﺔ ∴ 𝐹 = 𝜎. 𝐴 = 118.8 × 25 × 6 = 17820 𝑁 = 17.82 𝑘𝑁 ( مثال7):
- 53. اﻟﺳيﺧ ﺗﺣميل ﺗمهاﻟمﻘطﻊ مﺳاﺣﺔ ﻋﻠﻰ مﻧﺗظم اﻧضغاط اﺟﮭاد ذﻟك ﻋن يﻧﺗج ﺑﺣيث اﻟﺳاﺑق اﻟمﺛال ﻓﻲ مﻘداره.اﻟﺳيﺧ ﺗﺣمل ﻋﻧدما اﻻﻧفﻌال مﻘياس مﻘاومﺔ ِّدﺣدهاﻟﺟديد اﻻﺟﮭاد ھذا. الحل: اﻟمروﻧﺔ مﻌاير، 𝐸 = 𝜎 𝜖 𝜖 = 𝜎 𝐸 سالبة واالنضغاط موجبة الشد قيم خذ. 𝜎𝑐 = −30 𝑁/𝑚𝑚2 = −30 𝑀𝑁/𝑚2 = −0.03 𝐺𝑁/𝑚2 𝜖 = −0.03 200 = −0.00015 𝛿 𝑅 𝑅 = 𝑘 𝜖 𝛿 𝑅 120.27 = 2.1 × (−0.00015) ∴ 𝛿 𝑅 = 120.27 × 2.1 × (−0.00015) = −0.038 Ω االنﻔعال مقياس مقاومة فإن عليه، 𝑅 𝑓 = 120.27 − 0.038 = 120.232 Ω ( مثال8): مﻘداره ﺧطﻲ ﻟﺗمدد ﺣرارة درﺟﺔ مﻌامل ﻟديه اﻧفﻌال مﻘياس16 × 10−6 𝑐 𝑜−1 ﻋﻠﻰ رﺑطه يﺗم ( اﻟديوراﻟومين من ﻗطﻌﺔDuraluminيﺳاوي اﻟﺧطﻲ ﺗمددھا مﻌامل )23 × 10−6 𝑐 𝑜−1 . ﺑمﻘدار اﻟﺣرارة درﺟﺔ ﺗرﺗفﻊ ﻋﻧدما اﻻﻧفﻌال أﺣﺳب80 𝑐 𝑜 . الحل: اجعلLاالنﻔعال مقياس طول هو اﻟديوراﻟومين ،ﺗمدد 𝛿𝐿 = 𝐿 × 23 × 10−6 × 80 = 1840 𝐿 × 10−6 اﻟمﻘياس ،ﺗمدد 𝛿𝐿 = 𝐿 × 16 × 10−6 × 80 = 1280 𝐿 × 10−6 بمقدار المقياس سيتمدد عليه: 𝑥 = (1840 − 1280) 𝐿 × 10−6 = 560 𝐿 × 10−6 اﻟمﻘياس ،اﻧفﻌال 𝜖 = 𝑥 𝐿 = 560 𝐿 × 10−6 𝐿 = 560 × 10−6 = 0.56 × 10−3 ﻛﺑيرة ﻗيمﺔ ﺗﻌﺗﺑر ھذه،درﺟﺔ ظروف ﺗﺣت اﻻﻧفﻌال ﻗياﺳات ﻓإن اﻟﺗﺻﺣيح ﺑﻌض ﻋمل وﺑدون دﻗيﻘﺔ ﻏير ﺳﺗﻛون اﻟمﺗغيرة اﻟﺣرارة. 2.الحرارة درجة لقياس المقاومة محوالت: (Resistance Transducers for Temperature Measurement)
- 54. ﺣرارﺗﮭا درﺟﺔ ﺑزيادة اﻟﻛﮭرﺑيﺔ مﻘاومﺗﮭا ﺗزيد اﻟمﻌادن مﻌظم.أﺟﮭزة ﻓﻲ اﺳﺗﺧدامه يﺗم اﻟمﺑدأ ھذا اﻟﺣرارة درﺟﺔ ﻗياسواﻟﺗﻲاﻟمﻘاومﺔ ﺑﺛيرموميﺗرات ﺗﻌرف.من اﻟﻧاﺗج اﻟمﻘاومﺔ ﻓﻲ يرُّغاﻟﺗ أن ﺑما ًاﺟد ﺻغيرة ﻗيمﺗه اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟﺻغير اﻟﺗغير،ھﻧاﻟك ﺗﻛون أن يﺟب ﻗياس ﻧظام وﻟﺗﺻﻧيﻊ ﻋﻠيه ( ھويﺗﺳﺗون ﻗﻧطرة دائرة ﺷﻛل ﻓﻲ ﺗﮭيئﺔ إﺷارةWheatstone Bridge Circuitﺗﺟﻌل وھذه ) اﻟﻌاﻟيﺔ اﻟﺣرارة درﺟات ﺧاﺻﺔ اﻟﺣرارة درﺟﺔ ﻗياس ﻓﻲ دﻗﺔ أﻛﺛر اﻟمﻘاومﺔ ﺛيرموميﺗر. ﻋﺷر اﻟﺗاﺳﻊ اﻟﻘرن ﻓﻲ ھويﺗﺳﺗون ﺷارﻟس اﻟﺳير ﺑواﺳطﺔ ھويﺗﺳﺗون ﻗﻧطرة ﺗطوير ﺗم.ﻋﺑارة وھﻲ ﺑدﻗﺔ اﻟمﻘاومﺔ ﻟﻘياس ﻛﮭرﺑيﺔ دائرة ﻋن.( رﻗم اﻟﺷﻛل3.13ُي أدﻧاه )اﻟﻘﻧطرة دائرة ح ِّوض. ﺣيثR 𝐴ﻗياﺳﮭا اﻟمراد اﻟمﻘاومﺔ =. R 𝐷ﺛاﺑﺗﺔ مﻘاومﺔ =. رقم شكل(3.13) واﻟﻧﺳﺑﺔR 𝐵/ R 𝐶ﺑﺟﻌل إما ضﺑطﮭا يمﻛنR 𝐵أوR 𝐶( ﺑﺟﻌل أو مﺗغيرة مﻘاومﺔR 𝐵 + R 𝐶) اﻟﺟﻠفاﻧوميﺗر ﻟﺗوﺻيل اﻟﺗفريﻊ ﻧﻘطﺔ مﺗغيرة مﺳﺗمرة ﺛاﺑﺗﺔ مﻘاومﺔ. ھو اﻟﺟﻠفاﻧوميﺗراﻟﺗدريج ان يﻌﻧﻲ وھذا ﺻفري مرﻛزه ﺣﺳاس مﺗﺣرك مﻠف ذو مﻘياس ﻋن ﻋﺑارة اﻟﺗدريج مﻧﺗﺻف ﻓﻲ اﻟﺻفر ﺑوضﻊ وذﻟك اﻟمﺗﺳاويﺔ األﻗﺳام من ﺑﻌدد ﺗﻘﺳيمه يﺗم،يﺷير ما ًاودائم اﻟﺟﮭاز اﺳﺗﺧدام يﺗم ﻻ ﻋﻧدما اﻟﺻفر وضﻊ إﻟﻰ اﻟمؤﺷر.اﻟمﻘاومﺔ ﻟﻘياس اﻟﻘﻧطرة دائرة ﻻﺳﺗﺧدام R 𝐴،ﻓ يﺟب ﻓإﻧﻧامواز اﻟﺑدايﺔ ﻲاﻟﻧﺳﺑﺔ ﺑضﺑط يﺗم وھذا اﻟﻘﻧطرة ﻧﺔR 𝐵/ R 𝐶اﻟﺟﻠفاﻧوميﺗر يﺷير ﺣﺗﻰ طرﻓيه ﺑين ﺟﮭد وﺟود وﻋدم ﺑه مار ﺗيار وﺟود ﻋدم يﻌﻧﻲ وھذا اﻟﺻفر إﻟﻰ(اﻟﻧﻘاط ﻋﻧد اﻟﺟﮭد أن أي PوQًامﺗﺳاوي يﻛون). واآلنR 𝐴وR 𝐷اﻟﺗيار ﺷدة ﻧفس ﺗﺣمل. اﻟﻘدرة إمداد ﺟﮭد × 𝑅 𝐷 𝑅 𝐴 + 𝑅 𝐷 = 𝑃 ﻋﻧد اﻟﺟﮭد ًاوأيضR 𝐵وR 𝐶اﻟﺗيار ﺷدة ﻧفس ﺗﺣمل. اﻟﻘدرة إمداد ﺟﮭد × 𝑅 𝐶 𝑅 𝐵 + 𝑅 𝐶 = 𝑄 ﻋﻧد اﻟﺟﮭد اﻟﻘﻧطرة موازﻧﺔ ﻋﻧد ﻋﻠيه، 𝑅 𝐶 𝑅 𝐵 + 𝑅 𝐶 = 𝑅 𝐷 𝑅 𝐴 + 𝑅 𝐷 ∴ 𝑅 𝐶 ( 𝑅 𝐴 + 𝑅 𝐷) = 𝑅 𝐷 (𝑅 𝐵 + 𝑅 𝐶) 𝑅 𝐴 𝑅 𝐶 + 𝑅 𝐶 𝑅 𝐷 = 𝑅 𝐵 𝑅 𝐷 + 𝑅 𝐶 𝑅 𝐷
- 55. ∴ 𝑅 𝐴 𝑅 𝐷 = 𝑅 𝐵 𝑅 𝐶 ∴ 𝑅 𝐴 = 𝑅 𝐷 × 𝑅 𝐵 𝑅 𝐶 اﻟﻘدرة امداد ﺟﮭد ﻋن مﺳﺗﻘﻠﺔ ﺗﻛون اﻟﻧﺗيﺟﺔ وھذه. ( مثال9): أوﺟد𝑅 𝐴ﻛاﻧت إذا𝑅 𝐵 ،و 𝑅 𝐷 = 390 Ω، 𝑅 𝐶 = 180 Ω إﻟﻰ ضﺑطﮭا يمﻛن227.3 Ωاﻟﻘﻧطرة ﻟموازﻧﺔ. الحل: 𝑅 𝐴 = 𝑅 𝐷 × 𝑅 𝐵 𝑅 𝐶 ∴ 𝑅 𝐴 = 390 × 227.3 180 = 492 Ω iثيرموميتر .( المقاومةThe Resistance Thermometer:) ( رﻗم اﻟﺷﻛل3.14ھويﺗﺳﺗون ﻗﻧطرة ﺑدائرة موﺻل مﻘاومﺔ ﺛيرموميﺗر يوضح أدﻧاه ).مﻌظم ﺗﺗﻧاﺳب اﻟزيادة ھذه ﻓإن ﻟﻠمﻘاومﺔ ﺻغير مدى ﻋﻧد .ﺣرارﺗﮭا درﺟﺔ ﺑزيادة مﻘاومﺗﮭا ﺗزيد اﻟمﻌادن اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟزيادة مﻊ ًاطردي،ﻋﻧد ﺳﻠك من مﻌين طول مﻘاومﺔ ﻛاﻧت ﻓإذا0 𝑜 𝑐ھﻲ𝑅 𝑜ﻓإن مﻘاومﺗه𝑅ﺣرارة درﺟﺔ ﻋﻧد𝑡 𝑜 𝑐اﻟﺗاﻟيﺔ ﺑاﻟمﻌادﻟﺔ ﻌطﻲُﺗ: 𝑅 = 𝑅 𝑜 (1 + 𝛼 𝑡) ﺣيث𝛼ﺛاﺑت مﻘدار =(اﻟﺣرارة ﻟدرﺟات اﻟﺧطﻲ اﻟﺗمدد مﻌامل.) ﻓﻲ اﻟﺗغير ﺗﻘيس ﻛﮭرﺑيﺔ ودائرة ﺻغير مﻠف من اﻟمﻘاومﺔ ﺛيرموميﺗر يﺗﻛونﺛالﺛﺔ ھﻧاﻟك .مﻘاومﺗه اﻟﻧﺣاس ھﻲ اﻟمﻠف ﻓﻲ اﺳﺗﺧدامﮭا يمﻛن األﺳالك من أﻧواع،واﻟﺑالﺗين اﻟﻧيﻛل.ألﻧه اﻟﺑالﺗين ويفضل واﻟﺗأﻛﺳد اﻟﺻدأ يﻘاوم.ھﻲ اﻟﻌادي اﻟﺑالﺗين مﻘاومﺔ100ﻗطره ﺳﻠك من ويﺻﻧﻊ أوم0.1mm ( اﻟمايﻛا من ﻗطﻌﺔ ﺣول مﻠفوفMicaﺣمايﺔ ﻏطاء ﻓﻲ ومغﻠق ). ( رقم شكل3.14مقاومة ثيرموميتر ) ( مثال10): ومن اﻟﻧﻘاط ﺛالﺛيﺔ ﺧﻠيﺔ ﻓﻲ ًﻻأو اﻟمﻘاومﺔ مﻠف ﺑوضﻊ ضﺑطه يﺗم اﻟﺑالﺗين من مﻘاومﺔ ﺛيرمومﺗر اﻟﻘياﺳﻲ اﻟﺟوي اﻟضغط ﻋﻧد ماء ﺑﺧار ﻓﻲ ﺑﻌد.ﻗﻧطرة ﺑاﺳﺗﺧدام مﻘاومﺗه ﻗياس يﺗم ﺣاﻟﺔ ﻛل وﻓﻲ
- 56. اﻟﺗاﻟي اﻟﻘيم ﻋﻠﻰ اﻟﺣﺻول يﺗم ﺣيث ھويﺗﺳﺗوناﻟﺗرﺗيب ﻋﻠﻰ ﺔ102.515و أوم142.482أوم. ﺗﺳاوي مﻘاومﺗه أن وﺟد اﻟﺣرارة درﺟﺔ مﻌﻠوم ﻏير ﺳائل ﻓﻲ وضﻌه يﺗم وﻋﻧدما131.635أوم. واﻟمﻘاومﺔ اﻟﺣرارة درﺟﺔ ﺑين ﺧطيﺔ ﻋالﻗﺔ اﻓﺗرض،اﻟﺳائل ﺣرارة درﺟﺔ ماھﻲ: أ.اﻟمئوي ﺑاﻟمﻘياس،ب.ﻛﻠفن ﺑمﻘياس. الحل: ﺗﺳاوي ﺑأﻧﮭا ﺗﻌريفﮭا يﺗم اﻟﻧﻘاط ﺛالﺛيﺔ اﻟﺣرارة درﺟﺔ0.01 𝑜 𝑐،ﻋﻧد اﻟماء ﻏﻠيان ﺣرارة ودرﺟﺔ ﺗﺳاوي اﻟﺟوي اﻟضغط100 𝑜 𝑐. اﻟمﻌادﻟﺔ من، 𝑅 = 𝑅 𝑜 (1 + 𝛼 𝑡) 102.515 = 𝑅 𝑜 (1 + 0.01 𝛼 ) → (1) 142.482 = 𝑅 𝑜 (1 + 100 𝛼 ) → (2) ( اﻟمﻌادﻟﺔ ﺑﻘﺳمﺔ1( ÷ )2ﻧﺣﺻل اﻟﻌﻛﺳﻲ وﺑاﻟضرب )ﻋﻠﻰ: 102.515 + 10251.5 𝛼 = 142.482 + 1.42482 𝛼 10251.5 𝛼 = 39.967 ∴ 𝛼 = 39.967 10250.08 = 3.9 × 10−3 = 0.0039 ( اﻟمﻌادﻟﺔ من1)، 102.515 = 𝑅 𝑜 (1 + 0.01 × 0.0039 ) ∴ 𝑅 𝑜 = 102.515 1.000039 = 102.511 ∴ 131.635 = 102.511 (1 + 0.0039 𝑡 ) اﻟمئوي ﺑاﻟمﻘياس اﻟﺣرارة درﺟﺔ، 𝑡 = 72.85 𝑜 𝑐 ﻛﻠفن ﺑمﻘياس اﻟﺣرارة درﺟﺔ، 𝑇 = 72.85 + 273.15 = 346 𝐾 ( أﺧرى ﺑطريﻘﺔ أوi.e.اﻟمﺛﻠﺛات ﺗﺷاﺑه،) 𝑡 = 0.01 + 131.615 − 102.515 142.482 − 102.515 × 99.99 ∴ 𝑡 = 72.81 𝑜 𝑐
- 57. 𝑇 = 72.81 + 273.15 = 345.96 ⋍ 346 ii.( الثيرمستورThermistor:) اﻟﺛيرمﺳﺗوراﻟﺗغذيﺔ ﺗﺗم ما ًاودائم ﺣﺳاﺳيﺔ أﻛﺛر وﻟﻛن دﻗﺔ أﻗل وھو اﻟﺣرارة ﻟدرﺟﺔ مﺣول ھو ﺗﮭيئﺔ إﺷارة إﻟﻰ اﻟﺣاﺟﺔ دون مﺑاﺷرة. ( اﻟموﺻالت اﺷﺑاه أﻧواع أﺣد ھو واﻟﺛيرمﺳﺗورsemi-conductorsًاﺗﺑﻌ مﻘاومﺗه ﺗﺗغير ﺣيث ) اﻟمﻌادﻟﺔ ﺣﺳب اﻟﺣرارة درﺟﺔ ُّريﻟﺗغ𝑅 = 𝐴 𝑒 𝐵/𝑇 أﻛاﺳيد من ًاﻏاﻟﺑ اﻟﺛيرمﺳﺗور مادة ﺗﺻﻧيﻊ ويﺗم ( اﻟمﻌادنmetallic oxides). ﺣيثAوBﺛواﺑت =. T=اﻟﺣرارة درﺟﺔ.اﻟمطﻠﻘﺔ اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟﺻغيرة اﻟزيادة ﻋﻧد اﻟمﻘاومﺔ ﻓﻲ ًاﻛﺑير ًااﻧﺧفاض اﻟمﻌادﻟﺔ ھذه ﺗﻌطﻰ. ( رﻗم اﻟﺷﻛل3.15اﻟمﻘاو ضد اﻟﺣرارة درﺟﺔ مﺧطط يوضح أدﻧاه )واﻟﻧﺣاس ﻟﻠﺛيرمومﺳﺗور مﺔ. اﻟﻧﺳﺑﺔ ﻧأﺧذ ﻓإﻧﻧا اﻟمﺧططين ﺑين اﻟمﻘارﻧﺔ وﻟﻌمل 𝑅 𝑅 𝑜 ،اﻟﺗﻲواﻟمﻘاومﺔ اﻟفﻌﻠيﺔ اﻟمﻘاومﺔ ﺑين اﻟﻧﺳﺑﺔ ھﻲ ﻋﻧد0 𝑜 𝑐ﻋن ًﻻﺑدR. ( شكل3.15والنحاس للثيرمستور المقاومة ضد الحرارة درجة مخطط ) اﻟﺛيرمﺳﺗور اﺳﺗﺧدام يمﻛن أﻧه اﻟمﺧطط من ُالﺣظياﻟﺣ ﻟدرﺟﺔ ﻛمﺣولﺻغير مدى ﻓﻲ رارة اﻟﺣرارة ﻟدرﺟاتاﻟﺳيارات مﺣرﻛات ﻓﻲ اﻟماء ﺣرارة درﺟﺔ ﻗياس ﻧظام ﻟذﻟك مﺛال .،ﻻ إﻧﻧا ﺣيث ًاﺑارد اﻟماء يﻛون أن إما ھﻲ ﺣاﻻت ﺛالﺛﺔ ﻟﺗﺣديد ﻧﺣﺗاج ما ﺑﻘدر اﻟﻘياس ﻓﻲ ﻟدﻗﺔ ﻧﺣﺗاج،او ًاﻋادي ًاﺳاﺧﻧ.ھ ﻟيس اﻟﺣاﻟﺔ ھذه ﻓﻲ اﻟﺗيار ﺷدة ومﻘياسمﺗﺣرك مﻠف ذو مﻘياس و،ﺣمﻠه يﺗم مؤﺷر ﻓﮭﻧاﻟك أﺟﮭزة من اﻟغاﻟب اﻟﻧوع وھو ﻟذﻟك ًاﺗﺑﻌ ويﺗمدد اﻟمار ﺑاﻟﺗيار ﺗﺳﺧيﻧه يﺗم مادﺗين من مﻌدﻧﻲ ﺷريط ﻓﻲ .اﻟﻌرض ﺣرارة درﺟﺔ ﺣﺗﻰ أﻛﺑر ﺑدﻗﺔ اﻟﺣرارة درﺟﺔ ﻟﻘياس يﺳﺗﺧدم أﻧه اﻟﺛيرمﺳﺗور مميزات من300 𝑜 𝑐 ويمﻛن أﻛﺑر ﺑﺣﺳاﺳيﺔ ًاوايضواﺣدة ﻧﻘطﺔ ﻓﻲ اﻟﺣرارة درﺟﺔ ﻗياس ويمﻛﻧه أﺻغر ﺑﺣﺟم ﺗﺻﻧيﻌه ﺳريﻌﺔ ﺑاﺳﺗﺟاﺑﺔ. ( رﻗم اﻟﺷﻛل3.16ﺳيارة ﻓﻲ اﻟﺗﺑريد ماء ﺣرارة درﺟﺔ ﻟﻘياس ًاﻧظام يوضح أدﻧاه ).
- 58. ( رقم شكل3.16سيارة في التبريد ماء حرارة درجة قياس نظام ) ( مثال11): ﺛيرم ﺧواص ﻟﺗﺣديد مﻌمﻠيﺔ ﺗﺟرﺑﺔ ﻓﻲمﺣرك ﻓﻲ اﻟﺗﺑريد ماء ﺣرارة ﻟدرﺟﺔ ﻛمﺣول يﺳﺗﺧدم ﺳﺗور ﺳيارة.ﻧﻘطﺔ إﻟﻰ ًاﺗدريﺟي ﺣرارﺗه درﺟﺔ ُزادي اﻟذي واﻟمﻠح اﻟﺛﻠج من ﺧﻠيط ﻓﻲ اﻟﺛيرمﺳﺗور ﺗﻌﻠيق ﺗم ﻟيﺑرد يﺗرك ﺛم اﻟغﻠيان.ﺛيرموميﺗر ﺑواﺳطﺔ اﻟﺧﻠيط ﺣرارة ﻟدرﺟﺔ مﺗﻌددة ﻗراءات أﺧذ ﺗم،ﻗياس َّموﺗ اﻟﺛرمﺳﺗور مﻘاومﺔاﻟﺗاﻟيﺔ اﻟﻧﺗائج ﺗﺳﺟيل ﺗم ﺣيث رﻗمﻲ ﺗﻌددي مﻘياس ﺑواﺳطﺔ: در جة الحرا رة (𝑪 𝒐 ) 5 - 3 .5 1 7.5 3 6 5 5 7 6 8 5 1 00 9 7 6 6 4 3 2 1 الم قاومة (𝛀) 3 26 0 1 83 1 6 75 2 63 9 7.7 3 6.2 2 4.3 1 3.3 1 4.2 5 5.6 1 71. 4 5 81 أ..اﻟﺛيرمﺳﺗور مﻌايرة مﺧطط أرﺳم ب.اﻟﺛيرمﺳﺗور ﻗاﻧون ﺣدد.
- 59. الحل: أ.اﻟﺛيرمﺳﺗور مﻌايرة مﺧطط. ب.ھو ﻟﻠﺛيرمﺳﺗور اﻟﻌام اﻟﻘاﻧون𝑅 = 𝐴 𝑒 𝐵/𝑇 ( اﻟمﻌادﻟﺔ ﻟطرﻓﻲ اﻟطﺑيﻌﻲ اﻟﻠوﻏاريﺛم ﺑأﺧذi.e.ﻟألﺳاس اﻟﻠوﻏاريﺛمe) ln 𝑅 = ln (𝐴 𝑒 𝐵/𝑇 ) ln 𝑅 = ln A + ln 𝑒 𝐵/𝑇 ln 𝑅 = 𝐵 𝑇 ln e + ln 𝐴 = 𝐵 𝑇 + ln 𝐴 → (1) اﻟﺻورة ﻓﻲ اﻟمﻌادﻟﺔ ھذه ﺗﻛون𝑦 = 𝑎𝑥 + 𝑏 ﺣيث: ln 𝑅 = y 1 𝑇 = 𝑥 ln 𝐴 = b 𝐵 = 𝑎 ﻋﻠيه،مﺧطط رﺳم ﺗم إذاln 𝑅ضد 1 𝑇 اﻟﺛواﺑت ايﺟاد يمﻛن ومﻧه مﺳﺗﻘيم ﺧط ﻋﻠﻰ ﺳﻧﺣﺻل ln 𝐴 و 𝐵ﻗيمﺔ وﺑاﻟﺗاﻟﻲA.
- 60. درجة ( الحرارةt) (c) المقاومة (R) ()أوم المطلقة الحرارة درجة (T) )(كلﻔن 𝟏 𝑻 (𝑲−𝟏 ) 𝐥𝐧 𝑹 -5 3260 273-5=268 0.00373 8.09 3.5 1831 273+3.5=276.5 0.00362 7.51 17.5 765 290.5 0.00344 6.64 36 263 309 0.00324 5.57 55 97.7 328 0.00305 4.58 76 36.2 349 0.00287 3.59 85 24.3 358 0.00279 3.19 100 13.3 373 0.00268 2.59 97 14.2 370 0.00270 2.65 66 55.6 339 0.00295 4.02 43 171.4 316 0.00316 5.14 21 581 294 0.00340 6.36 اﻟمﺳﺗﻘيم اﻟﺧط ﻋﻠﻰ ﻧﻘطﺗين ﺧذ، ln 𝑅 = 8.09 , 1 𝑇 = 0.00373 𝐾−1 :ً وأيضا ln 𝑅 = 3.19 , 1 𝑇 = 0.00279 𝐾−1
- 61. ( اﻟمﻌادﻟﺔ ﻓﻲ ﺑاﻟﺗﻌويض1اﻟمﻌادﻻت من زوج ﻋﻠﻰ ﺳﻧﺣﺻل )اﻟﺗﻲًاآﻧي ﺣﻠﮭا يمﻛن: 8.09 = 0.00373 𝐵 + ln 𝐴 → (2) 3.19 = 0.00279 𝐵 + ln 𝐴 → (3) ( اﻟمﻌادﻟﺔ وﺑطرح3( اﻟمﻌادﻟﺔ من )2ﻋﻠﻰ ﻧﺣﺻل ): 4.90 = 0.00094 𝐵 ∴ 𝐵 = 4.9 0.00094 = 5213 𝐾 ( اﻟمﻌادﻟﺔ ﻓﻲ ﺑاﻟﺗﻌويض2)، 8.09 = 0.00373 × 5213 + ln 𝐴 ln 𝐴 = 8.09 − 0.00373 × 5213 = −11.35 ln 𝐴 = log 𝑒 𝐴 = 𝑥 = −11.35 ∵ 𝐴 = 𝑒 𝑥 ∴ 𝐴 = 𝑒−11.35 = 0.00001177 Ω ﻛاآلﺗﻲ ﻟﻠﺛيرمﺳﺗور اﻟﻌام اﻟﻘاﻧون ﻛﺗاﺑه يمﻛن ﺑاﻟﺗاﻟﻲ: 𝑅 = 0.0000117 𝑒5213/𝑇 3.3.3( الحرارة درجة قياس أجهزةTemperature Measurement Devices): اﻟﺣرارة درﺟﺔ ﻓﻲ ﻟﺗغييرات مﺧﺗﻠفﺔ مواد ﺗﺗﻌرض ﻋﻧدما،ﺗغييرات ًاايض ﺗﺣدث أن ﺑاﻟﺗاﻟﻲ يمﻛن اﻟﺑﻌد مﺛل اﻟﺧﺻائص ﻓﻲ،اﻟﻛﮭرﺑيﺔ اﻟمﻘاومﺔ،اﻟﻠون،واﻟﺣاﻟﺔ.اﻟﺗغييرات ﻓإن ﻟﻠمﻌادن مﻌيﻧﺔ ﻻﺗﺣادات ﺻغيرة ﻛﮭرﺑيﺔ داﻓﻌﺔ ﻗوة ًاايض ﺳﺗﻧﺗج اﻟﺣرارة درﺟﺔ ﻓﻲ.اﻟﺗغييرات ھذهاﻟﺗﻲاﺳﺗﺧدامﮭا يﺗم ﺗﺣدث اﻟموﺻوﻓﺔ اﻟﺣرارة درﺟﺔ ﻗياس أﺟﮭزة ﻓﻲأدﻧاه. 1.زجاجة في سائل ثيرمومترات(Liquid –in- Glass Thermometers): يﺗمدد ﻓإﻧه ﺳائل ﺗﺳﺧين يﺗم ﻋﻧدما،i.e.ﺣﺟمه يزداد،يﻧﻛمش ﻓإﻧه يﺑرد وﻋﻧدماi.e.ﺣﺟمه يﻘل. ﺛيرموميﺗرات ﻓﻲ مﻧه اﻻﺳﺗفادة يمﻛن اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟﺗغير مﻊ يﺣدث اﻟذي اﻟﺗغير ھذاﻓﻲ ﺳائل ( رﻗم اﻟﺷﻛل .زﺟاﺟﺔ3.17زﺟاﺟﺔ ﻓﻲ ﺳائل ﺛيرموميﺗر يوضح أدﻧاه ). ( رقم شكل3.17زجاجة في سائل ثيرموميتر )
- 62. ( اﻟﺷﻛل ﻓﻲ َّحضاﻟمو زﺟاﺟﺔ ﻓﻲ ﺳائل ﺛيرموميﺗر ﻓﻲ3.17اﻟرﻓيﻌﺔ اﻟزﺟاﺟيﺔ اﻟﺑﺻيﻠﺔ َّﻓإن ،) ﺳائل ﻋﻠﻰ ﺗﺣﺗوي،اﻟﺣاﻟﺔ ھذه ﻓﻲ زئﺑق،ﻟيﺗمدد ًاﺣر يﻛوناﻟزﺟاﺟﻲ ﻟألﻧﺑوب اﻟﻧاﻋم اﻟﻘطر ﺑطول، ( اﻟﺷﻌري ﺑاألﻧﺑوب يﺳمﻰ اﻟذيcapillary tube).يﻛون أن يمﻛن اﻟزئﺑق ﻓيه يﺗمدد اﻟذي اﻟفضاء ( ًاﻓراﻏvacuumاﻟﻧيﺗروﺟين ﻏاز يﺣوى أن يمﻛن أو ).ذو اﻟﺷﻌري األﻧﺑوب يﻛون أن اﻟمﮭم من اﻟﺗﺷغيﻠﻲ طوﻟه ﺑطول مﻧﺗظم ﻗطر،ﺗغييرات ﺗﻧﺗج اﻟﺣرارة درﺟﺔ ﻓﻲ مﺗﺳاويﺔ ﺗغييرات أن ﺑﺣيث اﻟزئﺑق ﻋمود طول ﻓﻲ مﺗﺳاويﺔ.ﻟدرﺟﺔ ﺗدريج ھﻲ اﻟﺛيرموميﺗر ﺧارج ﻋﻠﻰ اﻟمﺣفورة اﻟﻌالمات اﻟﺣرارة.اﻟمئويﺔ ﺑاﻟدرﺟات اﻟﺗدريج ﻋﻠﻰ اﻟﻌالمات وضﻊ اﻟﻌادة من(𝑐 𝑜 ). ﺣرارة درﺟات ﻓإن اﻟمئوي اﻟﺣرارة درﺟﺔ ﺗدريج ﻋﻠﻰ0 𝑜 𝑐و100 𝑜 𝑐اﻟﺗرﺗيب ﻋﻠﻰ ﺗرﺗﺑط ( اﻟﺗﺟمد ﺑﻧﻘطﺔfreezing point( اﻟغﻠيان وﻧﻘطﺔ )boiling pointﻗياﺳﻲ ﺟوي ضغط ﻋﻧد ﻟﻠماء ). ﻟـ ًامﺳاوي اﻟﻘياﺳﻲ اﻟﺟوي اﻟضغط يﻛون101.325 k𝑁/𝑚2 . ًامﺛاﻟي ﺗمﺗﻠك ان يﺟب اﻟﺛيرموميﺗرات ﻓﻲ اﻟمﺳﺗﺧدمﺔ اﻟﺳوائل: أ.اﻟﺣﺟمﻲ ﻟﻠﺗمدد ﺟيد مﻌامل. ب.اﻟزﺟاج ﺗﺑﻠل ﻻ،i.e.اﻟزﺟاج ﺑﺳطح اﻟﺳائل يﻠﺗﺻق أﻻ يﺟب. ج.ﺑﺳﮭوﻟﺔ رىُﺗ أن يﺟب. د.اﻻﺛﻧﺗان أو مرﺗفﻌﺔ ﻏﻠيان ﻧﻘطﺔ أو مﻧﺧفضﺔ ﺗﺟمد ﻧﻘطﺔ ﻟديﮭا يﻛون. أدناه الجدول في توضيحها يتم الثيرموميترات في المستخدمة السوائل بعض: الحرارة درجة مدى(𝑪 𝒐 )السائل من-3.9إﻟﻰ+350اﻟزئﺑق من-80إﻟﻰ+70اﻟﻛﺣول من-5إﻟﻰ+200Creosote من-200إﻟﻰ+30Pentane من-80إﻟﻰ+100Toluene ﻟﻠرؤيﺔ ﻗاﺑﻠيﺔ أﻛﺛر اﻟﺳوائل ﻟﺟﻌل،يزَّمم ﺑﻠون ﺻﺑغه يمﻛن ﺑﻌضﮭا ﻓإن. ﻋـاﻟيه اﻟﺟدول ﻓﻲ َّحضاﻟمو األﻋـﻠﻰ اﻟﺣرارة درﺟﺔ ﺣدﺣواﻟﻲ إﻟﻰ زيادﺗه يمﻛن ﻟﻠزئﺑق510 𝑜 𝑐 ﺑإدﺧالﻏازﻧيﺗروﺟيناﻟﺳائل ﻓوق اﻟفضاء ﻓﻲ ضغط ﺗﺣت.اﻟغﻠيان ﻧﻘطﺔ زيادة ھو اﻟغاز ﺗأﺛير ﻟﻠزئﺑق.اﻟضغط ﺑزيادة ذﻟك من أﻛﺛر اﻟغﻠيان ﻧﻘطﺔ زيادة يمﻛن،أ ﺑما مﺣدود اﺳﺗﺧدامه ھذا ﻟﻛنن اﻟذوﺑان ﻓﻲ ﺳيﺑدأ ﻧفﺳه اﻟزﺟاجﺛيرمومﺗرا ﺗﻛون .رﺧيﺻﺔ زﺟاﺟﺔ ﻓﻲ ﺳائل ت،اﻻﺳﺗﺧدام ﺳﮭﻠﺔ، ومﺗﻧﻘﻠﺔ. هاَّنأ في اﻷجهزة لهذه الرئيسية العيوب تنحصر: i.اﻟﻛﺳر وﺳﮭﻠﺔ ھﺷﺔ ﺗﻛون. ii.اﻟﺣرارة درﺟﺔ ﻓﻲ ﻟﻠﺗغير ﺑطيئﺔ اﺳﺗﺟاﺑﺔ ﻟﮭا. iii.ًامرئي اﻟﺳائل ﻋمود يﻛون ﻋﻧدما ﻓﻘط اﺳﺗﺧدامﮭا يمﻛن. iv.ﺳطح ﺣرارة درﺟﺔ ﻟﻘياس اﺳﺗﺧدامﮭا يمﻛن ﻻ.
- 63. v.ﺗﻛييفﮭا يمﻛن ﻻﻛأﺟﮭزة( اﺳﺗﺷﻌارsensorsاﻟﺣرارة درﺟﺔ ﻓﻲ اﻟذاﺗﻲ ﻟﻠﺗﺣﻛم ). vi.ﺑﻌيدة مﺳاﻓﺔ من ﻗراءﺗﮭا يمﻛن ﻻ. 2.( الحرارية المزدوجاتThermo Couples): ( رﻗم اﻟﺷﻛل ﻓﻲ ﺗوضيﺣﮭا يﺗم ﺣراري مزدوج دائرة ھﻧاﻟك3.18أدﻧاه ).ﺳﻠﻛين من ﺗﺗﻛون ﺗوﺻيل ﻧﻘاط ﻟﺗﻛوين طرﻓيﮭما ﻋﻧد ﺗوﺻيﻠﮭما يﺗم مﺧﺗﻠفين مﻌدﻧيين. األﺧرى وﺗﺑريد اﻟﺗوﺻيل ﻧﻘاط اﺣدى ﺗﺳﺧين ﺗم إذا،داﻓﻌﺔ ﻟﻘوة ﺻغير مﺑاﺷر ﺗيار ﺗوﻟيد ﺳيﺗم ﻛﮭرﺑيﺔ𝑒. 𝑚. 𝑓.اﻟﻛﮭرﺑيﺔ اﻟداﻓﻌﺔ اﻟﻘوة ھذه ﻗياس ﺗم إذا،درﺟﺔ ﻓﻲ اﻟفرق ﺗﺣديد يمﻛن ﺑاﻟﺗاﻟﻲ اﻟﺣراراﻟﺣﺳاﺳيﺔ أو اﻟﻛﮭرﺑيﺔ /اﻟﺣراريﺔ اﻟﺧاﺻيﺔ ﺑمﻌﻠوميﺔ واﻟﺑاردة اﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل ﻧﻘطﺗﻲ ﺑين ة أدﻧاه اﻟﺟدول ﻓﻲ اﻟموضﺣﺔ اﻟمﺗﺣدة ﻟﻠمﻌادن. الحساسية (𝒎𝑽/𝑪 𝒐 ) الحرارة درجة مدى )متصلة (قراءة(𝑪 𝒐 ) المعادن اتحاد 0.03-250 to + 400Copper – Constantan 0.05-200 to + 850Iron - Constantan 0.04-200 to + 1100Chromel - alumel 0.060 to + 1400Platinum /10% rhodium platinum ( رقم شكل3.18حراري مزدوج دائرة ) اﻟﺑاردة اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ مﻌرﻓﺔ ﺗم إذا،اﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ ﺑاﻟﺗاﻟﻲ اﻟﺣرارة درﺟﺔ ﻓرق + اﻟﺑاردة اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ =. ( مﺛال12اﻟﻛﮭرﺑيﺔ اﻟداﻓﻌﺔ اﻟﻘوة :)𝑒. 𝑚. 𝑓ﻛوﻧﺳﺗاﻧﺗان ﺣديد من ونَّﻛُم ﺣراري مزدوج ﺑواﺳطﺔ ھﻲ3.5mV.ﺣرارة درﺟﺔ ﻋﻧد اﻟﺑاردة اﻟﺗوﺻيل ﻧﻘطﺔ ﻛاﻧت إذا8 𝑜 𝑐،درﺟ ِّدﺣدﻟﻧﻘطﺔ اﻟﺣرارة ﺔ اﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل. ﻋاﻟيه اﻟﺟدول من،اﻟﺣديد ﺣﺳاﺳيﺔ–ھﻲ ﻛوﻧﺳﺗاﻧﺗان0.05 𝑚𝑉/ 𝑜 𝑐. 3.5 𝑚𝑉 ﻟـ اﻟﺣرارة درﺟﺔ ﻓرق = 3.5 𝑚𝑉 0.05 𝑚𝑉 / 𝑜 𝑐 = 70 𝑜 𝑐 اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ + اﻟﺣرارة درﺟﺔ ﻓرق = اﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ اﻟﺑاردة ﺣرارة درﺟﺔاﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل ﻧﻘطﺔ:
- 64. 8 𝑜 𝑐 + 70 𝑜 𝑐 = 78 𝑜 𝑐 i.e.ھﻲ اﻟﺳاﺧﻧﺔ اﻟﺗوﺻيل ﻧﻘطﺔ ﺣرارة درﺟﺔ78 𝑜 𝑐. 3.3.4والتيار الجهد قياس أجهزة: 1.( المتحرك الملف ذو المقياسThe Moving Coil Meter): من مﺳﺗطيﻠﺔ ﻛﺗﻠﺔ ﻋﻠﻰ ومﻠفوف مطﻠﻲ ًاﺟد رﻓيﻊ ﺳﻠك من مﻠف ﻋن ﻋﺑارة اﻟطاﻗﺔ مﺣولاألﻟموﻧيوم ﺣواﻟﻲ ﺧالل ﺑﺣريﺔ دوراﻧه يﺗم ﺑﺣيث ومغﻠق90أﻗطاب ﺑين اﻟمغﻧاطيﺳﻲ اﻟمﺟال ﻓﻲ درﺟﺔ اﻟدائم اﻟمغﻧاطيس.دائريﺔ األﻗطاب ﺑين اﻟفﺟوة ﺗﻛون،اﻟطري اﻟﺣديد من اﺳطواﻧﻲ ﻗﻠب وھﻧاﻟك (soft iron)(ﺑﺟﺳاءة ﺑﺻالدة قَّﻠﻌُم )وﺑﺗمرﻛزيهاﻟمغﻧاطيﺳﻲ اﻟمﺟال ﻟﺟذب اﻟفﺟوة ﻓﻲ،ﺑﺣيث اﻟمﻠف دوران ﻟمرﻛز ﺑاﻟﻧﺳﺑﺔ ًاﻗطري ﻧﺻف ًاﺗﻘريﺑ يﻛون.ﺑين اﻟفﺟوة ﻓﻲ يدور أن ﻟﻠمﻠف يمﻛن ﻋﻠيه اﻟﺣديدي واﻟﻘﻠب اﻟمغﻧاطيس أﻗطاب. ( رقم شكل3.19المغناطيسي المجال ) اﻟمغﻧاطيﺳيﺔ اﻟﻘوةاﻟﺗﻲاﻟﺗيار مﻊ مﺗﻧاﺳﺑﺔ ﺗﻛون مغﻧاطيﺳﻲ مﺟال ﻓﻲ ﻛﮭرﺑﻲ موﺻل ﻋﻠﻰ ﺗﻌمل ﺧ اﻟمﻧﺳاباﻟموﺻل الل،واﻟﺗيار اﻟمغﻧاطيﺳﻲ اﻟمﺟال من ﻛل مﻊ ومﺗﻌامدة.اﻟﻛﻠيﺔ اﻟﻘوة َّأن ﺑﺣيث، F،اﻟﺗﻲ( رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﻠف ﺟاﻧﺑﻲ أﺣد ﻋﻠﻰ ﺗﻌمل3.19اﻟﺗيار مﻊ مﺗﻧاﺳﺑﺔ ﺗﻛون ).اﻟﺟاﻧب ﻋﻠﻰ اﻟمضاد اﻻﺗﺟاه ﻓﻲ ًامﻧﺳاﺑ يﻛون ھﻧا اﻟﺗيار ﻟﻛن ًامﺗغير يﻛون ﻻ اﻟمﺟال اﺗﺟاه ﻓإن ﻟﻠمﻠف اآلﺧر،ﺑﺣيث ومضادة مﺳاويﺔ ﻗوة اﻧﺗاج يﺗمF.اﻟﺗيار مﻊ ًامﺗﻧاﺳﺑ دوران ﻋزم ًامﻌطي ًاازدواﺟ ﻧانِّﻛوُﺗ اﻟﻘوﺗان. وھ زاويﺔ إزاﺣﺔ إﻟﻰ اﻟﻌزم ﻟﺗﺣويل وﺳيﻠﺔ إﻟﻰ اآلن ﻧﺣﺗاجﺣﻠزوﻧﻲ اﻟﺗواء ياي ﺑاﺳﺗﺧدام ﻰَّﺗيﺗأ ذا اﻟميﻛاﻧيﻛيﺔ اﻟﺳاﻋات ﻓﻲ يﺳﺗﺧدم ﻛاﻟذي.يﺣﺗاج ﻟﻠياي اﻟمﻘاوم ﻟﻠﻌزم مﻌاﻛس اﺗﺟاه ﻓﻲ اﻟمﻠف دوران ﻟوﺣﺔ ﻓﻲ مﻌيﻧﺔ ﻗيم إﻟﻰ ﺑاﻹﺷارة يﻘوم اﻟمﻠف ﻋﻠﻰ ﻗطري ﻧﺻف مؤﺷر ﺑﺗرﻛيب يﺗم وھذا ﻋرض إﻟﻰ اﻟﺗدريج. اﻟمﺧطط ﺗمﺛيل يﺗماﻟﻛﺗﻠﻲذو ﻟﻠمﻘياس( رﻗم اﻟﺷﻛل ﻓﻲ اﻟمﺗﺣرك اﻟمﻠف3.20أدﻧاه ). رقم شكل(3.20)
- 65. ( مثال13): مﻘدار ًاﻋزم مﺗﺣرك مﻠف ذو مﻘياس ﻓﻲ اﻟمﻠف يﻧﺗج0.002N. mﺷدﺗه ﺗيار ﻓيه يﺳري ﻋﻧدما 500 μ A.يﻘرأ اﻟمﻘياس ﻛان إذا اﻟﺣﻠزوﻧﻲ ﻟﻠياي اﻟمﻧاﺳﺑﺔ اﻟﻛزازة ِّدﺣد100 μ Aﻛامل مﻘياس ﻓﻲ مﻘداره ﻟإلﻧﺣراف90درﺟﺔ. الحل: اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل أو اﻟﻛﺳب، 𝐺 = 𝑜/𝑃 𝑖/𝑃 = 0.002 0.0005 = 4 𝑁. 𝑚/ 𝐴 ﻟﻠﺟﮭاز اﻟﻘياس ﻋامل أو ﺣﺳاﺳيﺔ، 𝑜/𝑃 𝑖/𝑃 = 90 0.0001 = 900000 𝑑𝑒𝑔./ 𝐴 ﻛاآلﺗﻲ ﺗمﺛيﻠه يمﻛن اﻟرﻗميﺔ ﻟﻠﻘيم اﻟﻛﺗﻠﻲ اﻟمﺧطط ﻓإن وھﻛذا: 4 𝑁. 𝑚 𝐴 × 𝑘 × 1 = 900000 𝑑𝑒𝑔. 𝐴 ∴ 𝑅 = 900000 𝑑𝑒𝑔. 𝐴 × 1 4 𝐴 𝑁. 𝑚 = 225000 𝑑𝑒𝑔./𝑁. 𝑚 ﻟﻠياي اﻻﻟﺗواء ﻛزازة وﻟﻛن(𝜆)ﺗﺳاوي 𝑇 𝜃 ھﻲ ووﺣدﺗﮭا 𝑁.𝑚 𝑑𝑒𝑔. . ﻋﻠيه،مﻘﻠوب ھﻲ اﻟمطﻠوﺑﺔ اﻟﻛزازة َّﻓإنk 𝜆 = 1 𝑘 = 1 225000 𝑁. 𝑚 𝑑𝑒𝑔. = 4.44 × 10−6 𝑁. 𝑚 𝑑𝑒𝑔. مقاييس( التيار وشدة الجهدVoltmeters and Ammeters): اﻟﺗيار ﺷدة ﻟﻘياس ﺣﺳاس ﺟﮭاز ھو اﻟمﺗﺣرك اﻟمﻠف ذو اﻟمﻘياس أن اآلن ﻧدرك.ﺳﻠك أن وﺑما ( ﻋاﻟيﺔ ﻛﮭرﺑيﺔ مﻘاومﺔ يمﺗﻠك ﻓإﻧه رﻓيﻊ اﻟمﻠفi.e.ﺣواﻟﻲ300أوم،)ﻓﻲ يﺗﺳﺑب ﺻغير ﺗيار وأي )اﻟﺗدريج ﻟمﻘياس ﻛامل (اﻧﺣراف ﻗﺻوى ﻗيمﺔ اﻋطاء.األﻗﺻﻰ اﻻﻧﺣراف من أﻛﺑر ﺗيار ﺗمرير ﺗم وإذا اﻟﺟﮭاز وﺳيﺗﻌطل ﺳيﻧﺻﮭر اﻟمﻠف ﻓإن ﻟﻠﺗدريج.ﺑاﺳﺗﺧدام ﻛﺑيرة ﺗيارات ﻗياس يمﻛن ﻓإﻧﻧا ذﻟك ورﻏم ُم ﺧالل اﻟﺗيار مﻌظم ﺑﺗمرير وذﻟك اﻟمﺗﺣرك اﻟمﻠف ذو اﻟمﻘياس( ئ ِّﺟزShuntﺻغيرة مﻘاومﺔ ﻟه ) ( اﻟﺷﻛل ﻓﻲ ﻛما اﻟمﻘياس دائرة مﻊ اﻟﺗوازي ﻋﻠﻰ موﺻﻠﺔ ًاﺟد3.21-)أ. طرﻓيه ﺑين ًاﻧﺳﺑي ﺑﺳيط ﺟﮭد ﻓرق ﺑﺗطﺑيق ﺳيﻧﺻﮭر اﻟمﻠف أن ورﻏم.مﻘياس اﺳﺗﺧدام يمﻛن ﺑاﻟﺗاﻟﻲ ھ ﻛما اﻟمﻘياس مﻊ اﻟﺗواﻟﻲ ﻋﻠﻰ موﺻﻠﺔ ًاﺟد ﻛﺑيرة مﻘاومﺔ ﺑوضﻊ اﻟﻛﺑير اﻟﺟﮭد ﻟﻘياسﻓﻲ موضح و رﻗم اﻟﺷﻛل (3.21-)ب.
- 66. ( رقم شكل3.21التيار شدة مقياس أو االميتر )أ ـ ( رقم شكل3.21الجهد مقياس أو الﻔولتميتر )ب ـ 3.3.5( اإلشارة مهيئاتSignal Conditioners): 1.( المضخماتAmplifiers): ( اﻟﻛﻠمﺔTo amplifyيزيد ﺗﻌﻧﻰ )،اﻹﺷارة مﮭيئات أﺷﻛال من ﺷﻛل ھو م ِّاﻟمضﺧ ﻓإن وھﻛذا اﻟﺗﻲطﺑيﻌﺗﮭا ﺗغيير دون ما ﺑطريﻘﺔ اﻹﺷارة ﺗزيدﻹﻋطاءمن أﻛﺑر ﻛﮭرﺑائﻲ أو ميﻛاﻧيﻛﻲ مﺧرج اﻟمدﺧل. 1.1.( الميكانيكية المضخماتMechanical Amplifiers): ﺗﺳﺗﺧدم ﺧامﻠﺔ أو ﻓﻌاﻟﺔ ﻏير أﺟﮭزة ھﻲ اﻟميﻛاﻧيﻛيﺔ اﻟمضﺧماتأو اﻟﺧطيﺔ اﻻزاﺣﺔ ﻟﺗضﺧيم اﻟزاويﺔ.دﺧل إﺷارة ﺑواﺳطﺔ ﻓيﮭا اﻟﻘدرة ﺗوضﻊ ما ﺑﻘدر ﺧارﺟﻲ ﻗدرة امداد أي ﺗمﻠك ﻻ وھﻲ. .اﻟﺗروس ھﻲ اﻟزاويﺔ ﻟإلزاﺣﺔ ومﺛال اﻟراﻓﻌﺔ ھو اﻟﺧطيﺔ ﻟإلزاﺣﺔ ميﻛاﻧيﻛﻲ ﻟمضﺧم مﺛال ( رقم شكل22-لإلزاحة عاكس مضخم )أ( رقم شكل22-عاكس غير مضخم )بلإلزاحة
- 67. الحالتين كال في: 𝑏𝜃 𝑎𝜃 = اﻟﺧرج وﺻﻠﺔ إﻟﻰ اﻟدوران مﺣور من اﻟﻘطر ﻧﺻف اﻟدﺧل وﺻﻠﺔ إﻟﻰ اﻟدوران مﺣور من اﻟﻘطر ﻧﺻف = اﻟﺧرج إزاﺣﺔ اﻟدﺧل إزاﺣﺔ = اﻟﻛﺳب ،اﻟﻛﺳب 𝑇. 𝑜 = 𝐺 = 𝑏 𝑎 ( رﻗم اﻟﺷﻛل3.23( ﺑﺳيطﺔ ﺗروس مﺟموﻋﺔ يوضح أدﻧاه )simple gear trainمن مﻌﺷﻘﺔ ) .اﻟﺑﻌض ﺑﻌضﮭا ( رقم الشكل3.23)–بسيطة تروس مجموعة اﻟدﺧل ﺗرسAﻋدد ﺑه12اﻟﺧرج وﺗرس ﺳﻧﺔBﻋدد ﺑه9أﺳﻧان ،اﻟﻛﺳب 𝑇. 𝑜 = 𝐺 = 12 9 = 1.333 𝐴 اﻟﺗرس اﺳﻧان ﻋدد 𝐵 اﻟﺗرس اﺳﻧان ﻋدد = 𝐵 اﻟﺗرس ﺳرﻋﺔ 𝐴 اﻟﺗرس ﺳرﻋﺔ = اﻟﻛﺳب 𝐺 = 𝑁 𝐵 𝑁𝐴 = 𝑇𝐴 𝑇 𝐵 = 12 9 = 1.333 اﻟﻘائدة اﻟﺗروس أﺳﻧان ﻋدد ضرب ﺣاﺻل اﻟمﻘودة اﻟﺗروس أﺳﻧان ﻋدد ضرب ﺣاﺻل = اﻟمﻘود اﻟﺗرس ﺳرﻋﺔ اﻟﻘائد اﻟﺗرس ﺳرﻋﺔ = اﻟﻛﺳب أن ﺑمﻌﻧﻰ ﻟألزواج اﻟﻛﺳب ضرب ﺣاﺻل يﺳاوي اﻟﻛﻠﻲ اﻟﻛﺳب َّﻓإن اﻟمرﻛﺑﺔ اﻟﺗروس مﺟموﻋات ﺣاﻟﺔ ﻓﻲ اﻟمﻌﺷﻘﺔ ﻟﻠﺗروس اﻟمفردة. ( مثال14): .أَّﺔﺑمرﻛ راﻓﻌﺔ آﻟيﺔ( رﻗم اﻟﺷﻛل ﻓﻲ ﺑاﻟمﺧطط ﺗوضيﺣﮭا يﺗم ميﻛاﻧيﻛﻲ مﻘارﻧﺔ ﻟﻌﻧﺻر3.24) أدﻧاه.يمﺛل اﻟذي اﻟﺗدريج ﺗﻘﺳيم وﻋرض اﻟمﻧظومﺔ ﺗضﺧيم أﺣﺳب1ميﻛروميﺗر(1 μ m).
- 68. ( رقم شكل3.24) ب.من أﻛﺛر ميﻛاﻧيﻛﻲ مﻘارن ﺑواﺳطﺔ ﻋﻠيه اﻟمﺗﺣﺻل اﻟﺗضﺧيم يزيد ﻻ ﻟماذا وضح5000:1 مﻘداره ﺗضﺧيم ﻋﻠﻰ اﻟﺣﺻول يمﻛن ﺑيﻧما50,000:1( ھوائيﺔ ﻧظم ﺑواﺳطﺔPneumatic) ( وﻛﮭرﺑائيﺔElectrical.) الحل: أ. = اﻟدﺧل ازاﺣﺔ أن ﻧفرض𝑥 = األوﻟﻰ ﻟﻠمرﺣﻠﺔ اﻟﺧرج إزاﺣﺔy1 = اﻟﺛاﻧيﺔ ﻟﻠمرﺣﻠﺔ اﻟﺧرج إزاﺣﺔy2 األوﻟﻲ اﻟمرﺣﻠﺔ ﻛﺳب أدﻧاه اﻟﺷﻛل من: 𝐺1 = y1 𝑥 ﺑﺗﺷاﺑهاﻟمﺛﻠﺛات: 𝐺1 = y1 𝑥 = 120 1 = 120 اﻟﺛاﻧيﺔ اﻟمرﺣﻠﺔ ﻛﺳب: 𝐺2 = y2 𝑦1
- 69. 𝐺2 = y2 𝑦1 = 100 4 = 25 ﻟﻠمﻧظومﺔ اﻟﻛﻠﻲ اﻟﻛﺳب()اﻟمﻧظومﺔ ﺗضﺧيم، 𝐺1 × 𝐺2 = 120 × 25 = 3000 3 𝑚𝑚 = 103 × 10−6 × 3000 = اﻟﺗدريج ﺗﻘﺳيم ﻋرض ∴ ب.اﻟذاﺗﻲ اﻟﻘﺻور ﺗأﺛير ﺑيﻧﮭا من ﺗأﺛيرات ﻟﻌدة،اﻟﺗﺳارع ﺗأﺛير،اﻟمﻘاومﺔﻋﻧد اﻻﺣﺗﻛاﻛيﺔ وﻏيرھا اﻻﺳﻧادات. ( مثال15): ( رﻗم اﻟﺷﻛل3.25ميﻛاﻧيﻛﻲ ﻟمﻘارن آﻟيﺔ يمﺛل أدﻧاه )،؟ اﻟمﻧظومﺔ ﺗضﺧيم أﺣﺳب ( رقم شكل3.25) المثلثات تشابه باستخدام: اﻻوﻟﻲ اﻟمرﺣﻠﺔ ﻛﺳب𝐺1، 𝐺1 = 𝑦 𝑥 = 125 6 أن وﺑما: 𝑦 = 𝑟 𝜃 اﻟﺛاﻧيﺔ اﻟمرﺣﻠﺔ ﻛﺳبG2،
- 70. 𝐺2 = 𝜃 𝑦 = 1 𝑟 = 1 1.5 ﺣيث𝑟اﻟﺑﻛرة ﻗطر ﻧﺻف ھو. زاويﺔ إزاﺣﺔ ھو اﻟمدﺧل أن ﺑما𝜃ﺧطيﺔ إزاﺣﺔ ھو واﻟمﺧرج𝑠ﺗﻌادل𝑟 𝜃 ∴اﻟﺛاﻟﺛﺔ اﻟمرﺣﻠﺔ ﻛﺳب،𝐺3 𝐺3 = 𝑠 𝜃 = 𝑟 𝜃 𝜃 = 𝑟 = 120 ﺣيث𝑟اﻟمؤﺷر ﻗطر ﻧﺻف ھو. اﻟمﻧظومﺔ ﺗضﺧيم، 𝐺1 × 𝐺2 × 𝐺3 = 125 6 × 1 1.5 × 120 = 1667 مثال(16): ( رﻗم اﻟﺷﻛل3.26إدارة ﺳير ﺑواﺳطﺔ ادارﺗﮭا يﺗم اﻟﺗروس ﻋﺟالت من مﺟموﻋﺔ َّحضُوي أدﻧاه ) ﺳﺣب ﻗوة يﺻﻧﻊمماﺳيهﻗطرھا ﺑﻛرة ﻋﻠﻰ20mmاﻟﻌﺟﻠﺔ ﺑواﺳطﺔ ﺣمﻠﮭا يﺗمAاﻟﺗرﺗيﺑﺔ وﺗمﺛل . إزاﺣﺔ ﻗياس مﻧظومﺔ اﻟﺷﻛل ﻓﻲ ﺔَّﺣاﻟموض.اﻟﻌﺟالت أﺳﻧان ﻋددE,D,C,B,Aاﻟﺗرﺗيب ﻋﻠﻰ ھﻲ 150،75،150،100و50 اآلتي أحسب: أ.اﻟﻌﺟﻠﺔ ﺑين اﻟﺗروس مﺟموﻋﺔ ﻛﺳبAواﻟﻌﺟﻠﺔE. ب.ﺑاﻟـ ﻟﻠمﻧظومﺔ اﻟﻛﻠﻲ اﻟﻛﺳبdeg./mm. ( رقم شكل3.26) أ.اﻟﻌﺟﻠﺔ ﺑين اﻟﺗروس مﺟموﻋﺔ ﻛﺳبAواﻟﻌﺟﻠﺔE، اﻟمﻘود اﻟﺗرس ﺳرﻋﺔ اﻟﻘائد اﻟﺗرس ﺳرﻋﺔ = اﻟﻘائدة اﻟﺗروس أﺳﻧان ﻋدد ضرب ﺣاﺻل اﻟمﻘودة اﻟﺗروس أﺳﻧان ﻋدد ضرب ﺣاﺻل 𝐺1 = 𝑁𝐸 𝑁𝐴 = 𝑇𝐴 𝑇 𝐵 × 𝑇𝐶 𝑇 𝐷 × 𝑇 𝐷 𝑇𝐸 = 𝑇𝐴 × 𝑇𝐶 𝑇 𝐵 × 𝑇𝐸 = 150 × 150 75 × 50 = 6 ب.ﺑاﻟـ ﻟﻠمﻧظومﺔ اﻟﻛﻠﻲ اﻟﻛﺳبdeg./mm،
- 71. 𝑟𝑎𝑑 𝑚𝑚 ﺑاﻟـ واﻟﺑﻛرة اﻟﺳير ﺑين ،اﻟﻛﺳب 𝐺2 = ﻟﻠﺑﻛرة اﻟزاويﺔ اﻹزاﺣﺔ ﻟﻠﺳير اﻟﺧطيﺔ اﻹزاﺣﺔ = 𝜃 𝑠 = 𝜃 𝑟𝜃 = 1 𝑟 = 1 10 𝑟𝑎𝑑/𝑚𝑚 𝑑𝑒𝑔. 𝑚𝑚 ﺑاﻟـ واﻟﺑﻛرة اﻟﺳير ﺑين ،اﻟﻛﺳب 𝐺2 = 1 10 × 180 𝑜 𝜋 = 5.73 𝑑𝑒𝑔./𝑚𝑚 ﻟﻠمﻧظومﺔ اﻟﻛﻠﻲ اﻟﻛﺳب: 𝐺1 × 𝐺2 = 6 × 5.73 = 34.4 𝑑𝑒𝑔./ 𝑚𝑚 3.4إضافية مسائل: 1مﻘدارھا مؤﺷر ﺑدورة ﺗﺻميمه يراد ضغط مﻘياس .315درﺟﺔ،من اﻟضغط يﺗراوح ﻋﻧدما إﻟﻰ ﺻفر7 bar.ﺑمﻘدار ﺑوردون أﻧﺑوب وﺻﻠﺔ ﻧﮭايﺔ ﺗﻧﺣرف1.75mmاﻟضغط ﻓﻲ ﻟزيادة مﻘدارھا7 bar.ﻗطر ﺑﻧﺻف ﺑذراع مﺗﺻﻠﺔ ﺑوردون أﻧﺑوب ﻧﮭايﺔ ﻛاﻧت إذا10mm.ﻧﺳﺑﺔ ﺣدد اﻟﺑﻧيون وﺗرس اﻟدائري رﺑﻊ اﻟﺗرس ﺑين اﻟمﻧاﺳﺑﺔ األﺳﻧان ﻋدد.اﻟمﻌياريﺔ اﻟﺗروس ﻧﺳﺑﺔ ﻛاﻧت وإذا ھﻲ30:1اﻟﺟديد اﻟذراع ﻗطر ﻧﺻف ﻓأﺣﺳب. 𝑨𝒏𝒔. (𝟑𝟏. 𝟒, 𝟗. 𝟓𝟓 𝒎𝒎) 2أﺟﮭزة ﻓﻲ اﻟمﺳﺗﺧدمﺔ اآلﺗيﺔ اﻟمﺻطﻠﺣات مﻌﻧﻰ اﻟﺧاﺻﺔ مفرداﺗك وﺑاﺳﺗﺧدام ﺑاﺧﺗﺻار أﺷرح . ﻋادي ﺑﺛيرموميﺗر ماء ﺣرارة درﺟﺔ ﻗياس يراد ﻋﻧدما اﻟﮭﻧدﺳيﺔ اﻟﻘياس: أ.مﺣولاﻟطاﻗﺔ. ب.اﻹﺷارة مﮭيئ. ج.اﻟﻌرض وﺣدة. 3؟ اﻟﺛيرمﺳﺗور ھو ما .أ . مدﺧل ﻟمﺧطط ًاﻛروﻛي ًارﺳم أرﺳم .ب–ﺛيرمﺳﺗور مﺧرج. ًاﻋمﻠي ًاﺗطﺑيﻘ وأذﻛر ﺛيرمﺳﺗور من مﻛوﻧﺔ ﻗياس ﻟمﻧظومﺔ ﻛﮭرﺑائيﺔ ﻟدائرة ًامﺧطط أرﺳم .ج اﻟﻘياس ﻧظم من اﻟﻧوع ھذا ﻻﺳﺗﺧدام. ﺑاﻟمﻌادﻟﺔ ﺗﻌطﻰ ﻟﺛيرمﺳﺗور اﻟﺣرارة ودرﺟﺔ اﻟمﻘاومﺔ ﺑين اﻟﻌالﻗﺔ .د𝑅 = 𝐴 𝑒 𝐵/𝑇 .درﺟﺔ اﻟمميزة اﻟﺣرارةBھﻲ3050 Kﺣرارة درﺟﺔ ﻋﻧد اﻟﺛيرمﺳﺗور مﻘاومﺔ ﻛاﻧت إذا25 𝑜 𝑐ھﻲ 1650أوم،ﻋﻧد مﻘاومﺗه ﺣدد: i.ﺣرارة درﺟﺔ0 𝑜 𝑐. ii.ﺣرارة درﺟﺔ300 𝑜 𝑐. 4.مﻘاوم ﺛيرموميﺗرمﻘدارھا مﻘاومﺔ يمﺗﻠك اﻟﺑالﺗين من ﺔ56.68اﻟﻧﻘطﺔ ﺣرارة درﺟﺔ ﻋﻧد أوم ( ﻟﻠماء اﻟﺛالﺛيﺔi.e.(0.01 𝑜 𝑐مﻘدارھا ومﻘاومﺔ )78.925ﻋﻧد اﻟماء ﻏﻠيان ﺣرارة درﺟﺔ ﻋﻧد أوم اﻟﻘياﺳﻲ اﻟﺟوي اﻟضغط.ﻟـ مﺳاويﺔ مﻘاومﺗه ﺗﻛون ﻋﻧدما اﻟﺛيرموميﺗر ﺣرارة درﺟﺔ ھﻲ ما: أ.64.56.أوم ب.93.12.أوم اﻟمطﻠق واﻟمﻘياس اﻟمئوي ﺑاﻟمﻘياس.واﻟمﻘاومﺔ اﻟﺣرارة درﺟﺔ ﺑين ﺧطيﺔ ﻋالﻗﺔ اﻓﺗرض. 5أ ..ما؟ اﻻﻧفﻌال ﻟﻘياس اﺳﺗﺧدامه يﺗم وﻛيف ؟ اﻟﻛﮭرﺑيﺔ اﻟمﻘاومﺔ اﻧفﻌال مﻘياس ھو
- 72. ب.:اﻧفﻌال مﻘياس ﻟﻘضيب ﺷد اﺧﺗﺑار من اﻟﺗاﻟيﺔ اﻟﺑياﻧات ﻋﻠﻰ اﻟﺣﺻول ﺗم األﺻﻠيﺔ اﻟمﻘاومﺔﻟﻠمﻘياس=500.32أوم. ﻟﻠمﻘياس اﻟﻧﮭائيﺔ اﻟمﻘاومﺔ=501.46أوم. اﻟمﻘياس ﻋامل=2.04 اﻟﻘضيب ﻟمادة اﻟمروﻧﺔ مﻌاير=200 GN/m2 . اﻟﻘضيب ﻗطر=14mm ﻟﻠﻘضيب اآلﺗﻲ ﺣدد: i.اﻧفﻌال.اﻟﺷد ii.اﺟﮭاد.اﻟﺷد iii.ﺣمل.اﻟﺷد 6ماﻧوميﺗر .اﻟﻧﺳﺑيﺔ ﻛﺛاﻓﺗه زيت ﻋﻠﻰ يﺣﺗوى مائل0.8،مﻘدارھا ﺑزاويﺔ مائل طرﻓيه أﺣد10 اﻻﻓﻘﻲ ﻋﻠﻰ درﺟﺔ.يﺳاوي اﻟمائل ﻟﻠطرف اﻟداﺧﻠﻲ اﻟﻘطر2mm،مﺳﺗطيل مﻘطﻌه اﻟواﺳﻊ واﻟطرف اﻟداﺧﻠيﺔ ﺑاألﺑﻌاد40mm×.20mmﺻفر من ھو اﻟﺟﮭاز ﻗياس مدىوﺣﺗﻰ30𝑚𝑚 𝐻2 𝑜. ﻟمﻘياس اﻟفﻌﻠﻲ اﻟطول أﺣﺳباﻟﺗﻘﺳيمات ﺑين اﻟﺗدرج0𝑚𝑚 𝐻2 𝑜و30𝑚𝑚 𝐻2 𝑜. 𝑨𝒏𝒔. (𝟐𝟏𝟏𝒎𝒎) 7ﻏاليﺔ ﻓﻲ اﻟﺣرارة اﻧﺳياب يﻛون .1.5 (θi − θo)kw،ﺣيثθiاﻟمﺗﺣﻛم ضﺑط (controller settingو )θoاﻟغاليﺔ ﺣرارة درﺟﺔ ھﻲ.مﺳاويﺔ ﻟﻠغاليﺔ اﻟﺣراريﺔ اﻟﺳﻌﺔ ﻛاﻧت إذا ﻟـ150 kj/ 𝑜 𝑐.ﻟﻠغاليﺔ اﻟزمن وﺛاﺑت اﻻﻧﺗﻘال ﻋامل ﻋﻠﻰ ﺗﺣﺻل. 8مﻘدارھا ﺳطح ﺑمﺳاﺣﺔ ﺻغيرة ﺑﺣيرة .104 𝑚2 إﻟﻰ اﻟﺳريان ﻗياس ويﺗم ﺑﺟدول ﺗغذيﺗﮭا يﺗم ( ھدار ﺑواﺳطﺔ اﻟﺧارجweir)،ﺑـ اﻟﺳريان مﻌدل اﻋطاء يﺗم𝑄 = 5 ℎ3/2 𝑚3 / 𝑠،ﺣيثℎھو ﺑاألمﺗار اﻟﮭدار ﻓوق اﻟماء ﺳمت.ﻋالﻗ ﻋﻠﻰ لَّﺻﺗﺣﻟﺗفاوﺗات اﻟدﺧﻠﻰ واﻟﺳريان اﻟﺧرﺟﻲ اﻟﺳريان ﺑين ﺔ ﻓﻲ ﺻغيرةℎﻟﻠمﻧظومﺔ اﻟزمن ﺛاﺑت وﺣدد. 𝑨𝒏𝒔. { 𝑸 𝒐 𝑸𝒊 = 𝟏 𝟏 + (𝟒𝟎𝟎/𝟑 √𝒉) 𝑫 ، 𝟒𝟎𝟎 𝟑 √𝒉} 9اﻟﺣراريﺔ موﺻﻠيﺗه ﻏاز ﺛرموميﺗر .0.02 𝑤/ 𝑜 𝑐اﻟﺣراريﺔ وﺳﻌﺗه0.1 𝑗/ 𝑜 𝑐ﺛاﺑت ﺣدد ﻟﻠﺛيرموميﺗر اﻟزمن. 10رﻗم اﻟﺷﻛل .(3.27دﺧﻠﻲ ﺣﺟمﻲ ﺳريان ﺑمﻌدل ﺧزان يوضح أدﻧاه )𝑄𝑖ﺳريان ومﻌدل ﺧرﺟﻲ ﺣﺟمﻲ𝑄 𝑜،اﻟماء ﻋمقℎًاﺗﻘريﺑ ًاﺛاﺑﺗ إﻋداده يﺗم اﻟﺧزان ﻓﻲ.اﻟﺗﺣويل ﻋامل أوﺟداﻻﻧﺗﻘال أو اﻟزمن وﺛاﺑت اﻟمﻧظومﺔ ﻟﮭذه𝜏. 𝑨𝒏𝒔. { 𝑸 𝒐 𝑸𝒊 = 𝟏 𝟏 + 𝑨𝑹𝑫 ، 𝑨𝑹}
- 73. ( رقم شكل3.27) 11أ ..اﻟمﺧطط ﺧفضاﻟﻛﺗﻠﻲ( رﻗم اﻟﺗاﻟﻲ3.28ﺑوﺣدة ﺧﻠفيﺔ ﺗغذيﺔ ﺷﻛل ﻓﻲ ) ( رقم شكل3.28) ب.اﻟﺧرج ﺣدد𝜃𝑖( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضح ﻟﻠﻧظام3.29أدﻧاه ): ( رقم شكل3.29) 𝑨𝒏𝒔. { 𝟐𝒌𝑫 𝟐 + 𝒌𝒔𝜽𝒊 + 𝒔( 𝒔 + 𝟐) 𝑫 𝟏 𝟐( 𝟏 − 𝟐𝒌) + 𝟐(𝟏 − 𝒌) ، 𝑨𝑹}
- 74. 12ذاﺗﻲ ﻗﺻور ﻋزم ﻟه ار َّدو .𝑗 (𝑘𝑚2 )مﻘداره ًاﻋزم يﺗطﻠب ﻟزج ﺑمضائل مﻘﺗرن 𝐹(𝑁. 𝑚. 𝑟𝑎𝑑−1 𝑠).ﻟﻠدوار اﻟزاويﺔ اﻟﺳرﻋﺔ ﺑين ًاﻛﺗﻠي ًامﺧطط أرﺳمω(𝑟𝑎𝑑 𝑠−1 )واﻟﻌزم اﻟمطﺑق𝑇(𝑁. 𝑚)اﻟمﺗغيرين ھذين ﺑين اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ ﻋﻠﻰ ﺗﺣﺻل وﺑاﻟﺗاﻟﻲ. 13األﺟﮭزة من ﻟﺟﮭازين اﻟﺗﺷغيل ومﺑدأ ﺑﻧيﺔ أﺷرح .اﻟﺗاﻟيﺔ،ًاﻛﺗﻠي ًامﺧطط ﺣاﻟﺔ ﻛل ﻓﻲ ًامﻌطي ﻟﻠﺟﮭاز. أ.اﻟضغط ﻟﻘياس ﺑوردون أﻧﺑوب. ب.اﻟمﺗﺣرك اﻟمﻠف ذو اﻟمﻘياس. ج.اﻟﺛيرمﺳﺗور. د.اﻟﺛيرموميﺗر. 14ھو ﺷد ﻟﺣمل َّﺔضمﻌر اﻟطري اﻟفوﻻذ من ﻟﻘطﻌﺔ ﺑه اﻟمﺳموح األﻗﺻﻰ اﻻﺟﮭاد .100𝑀𝑃𝑎 ھو ﻟﻠمادة اﻟمروﻧﺔ ومﻌاير200𝐺𝑃𝑎.اﻻﻧفﻌا أﺣﺳباﻻﺟﮭاد ﻟﮭذا ﻧﺗيﺟﺔ يﺣدث اﻟذي األﻗﺻﻰ ل، ﺗﺳاوي مﻘاومﺗه اﻟذي اﻻﻧفﻌال مﻘياس مﻘاومﺔ ﻓﻲ اﻟﺗغير ًاوايض99.89يﺳاوي مﻘياﺳه وﻋامل أوم 2.15اﻹﺟﮭاد مﻊ مﺣوري ﺧط ﻓﻲ اﻟﺳطح إﻟﻰ رﺑطه يﺗم واﻟذي.اﻟواضﺣﺔ اﻟﺗغييرات ًاأيض أﺣﺳب واﻻﺟﮭاد ﻟالﻧفﻌالاﻟﺗﻲﺗﺣدثﻧﺗي اﻟفوﻻذ ﻗطﻌﺔ ﻓﻲمن اﻟﺣرارة درﺟﺔ ﻟﺗغير ﺟﺔ20 𝑜 𝑐إﻟﻰ ﻟﻠفوﻻذ 80 𝑜 𝑐ﺗﻌويض ھﻧاﻟك يﻛن ﻟم إذااﻟﺣرارة درﺟﺔ ﻓﻲ.اﻟﺧطﻲ ﻟﻠﺗمدد اﻟﺣرارة درﺟﺔ مﻌامالت ﺧذ 12 × 10−6 𝑜 𝑐−1 و ﻟﻠفوﻻذ16 × 10−6 𝑜 𝑐−1 .اﻻﻧفﻌال ﻟمﻘياس 15ﻟﺛيرمﺳﺗور اﻟمميزة اﻟﺣرارة درﺟﺔ ﻟﺗﺣديد اﺧﺗﺑار ﻓﻲ .،اﻟﺗاﻟيﺔ اﻟﻧﺗائج ﺗﺳﺟيل ﺗم: درجة الحرارة (( 𝒐 𝒄) 213040506070809 0 10 0 المقاو مة(k ) 11 17 68 0 44 9 27 8 17 4 11 3 75 .5 5 1 35 .3 أرﺳمln 𝑅ضد1/𝑇اﻟﺛواﺑت ﻗيم ﻟﺗﺣديد اﻟمﺳﺗﻘيم اﻟﺧط ﻋﻠﻰ ﻧﻘطﺗين واﺳﺗﺧدمAوBﻓﻲ ﻟﻠﺛيرمﺳﺗور اﻟﻌامﺔ اﻟمﻌادﻟﺔ. 16( رﻗم اﻟﺷﻛل ﻓﻲ اﻟموضﺣﺔ واﻟياي واﻟمضائل اﻟﻛﺗﻠﺔ ﻧظام .3.30األمامﻲ اﻟمﺳار ﺗمﺛل أدﻧاه ) اﻟﺣﻠﻘﺔ مغﻠق ﺗﺣﻛم ﻟﻧظام.اﻟﺧطأ وإﺷارةεاﻟموضح اﻟﺟزء دﺧل ھﻲ.ﻟﮭذا األمامﻲ اﻟمﺳار دوال ِّدﺣد اﻟﻧظام. ﻛان إذا /أ𝜃1اﻟﺧرج ھو. ﻛان إذا /ب𝜃2اﻟﺧرج ھو.
- 75. ( رقم شكل3.30) 17ﺣرف ﺷﻛل ﻓﻲ ماﻧوميﺗر .∪اﻟﺳاﻗين أﺣد ﺑﺗوﺻيل ضغط ﻓرق ﻟﻘياس ﻛﻧظام اﺳﺗﺧدامه يﺗم اﻟضغط إﻟﻰ األﻋﻠﻰ اﻟضغط إﻟﻰ األﺧرى واﻟﺳاق األدﻧﻰ.اﻟمﻧاﺳيب ﻓﻲ ﻟفرق اﻟمﻧاظر اﻟضغط ﻓرق أﺣﺳب مﻘداره291mm:اﻟﺳاﻗين ﺑين أ.أﻧﺑوب ﻓﻲ اﻟﺳائل ﻛان إذا-∪زئﺑق ھو،.ﻏاز ضغوط ھﻲ واﻟضغوط ب.ﻛ إذاأﻧﺑوب ﻓﻲ اﻟﺳائل ان-∪زئﺑق ھو،اﻟﻧظام وﺑﻘيﺔمﻠﻲء.ﺑماء ًاﺗمام ج.أﻧﺑوب ﻓﻲ اﻟﺳائل ﻛان إذا-∪ماء ھو،اﻟﻧظام وﺑﻘيﺔمﻠﻲء(ﺑﻛﺛاﻓﺔ ﺑﺑﺗرول ًاﺗمام ﻧﺳﺑيﺔ0.68). 18؟ مائل ماﻧوميﺗر وأوﺻف ًاﺗوضيﺣي ًارﺳم أرﺳم .أ . ما .بمن اﻟﻧوع ھذا ﻓيه يﺳﺗﺧدم اﻟذي اﻟﻘياس ﻧوع ھو؟ اﻟماﻧوميﺗرات .جاﻟﺗ اﻟﺗﺣوطات ماھﻲﻲاﻟماﻧوميﺗرات من اﻟﻧوع ھذا من ﻗراءات أي أﺧذ ﻗﺑل أﺧذھا يﺟب. 19مﻘياس إﻟﻰ موﺻﻠﺔ ﻓوﻻذ ﺑﺻيﻠﺔ من يﺗﻛون اﻟﺑﺧار ضغط ﻧوع من ﺣرارة درﺟﺔ مﻘياس . ﺷﻌري ﻓوﻻذ أﻧﺑوب ﺑواﺳطﺔ ضغط،( رﻗم ﺷﻛل اﻟمﺧطط ﻓﻲ َّحضوُم ھو ﻛما3.31).اﻟﺑﺻيﻠﺔ، األﻧﺑوﻓﻲ اﻟضغط أن ﺑﺣيث مﺗﺑﺧر ﺑﺳائل مﻠئﮭا يﺗم اﻟضغط ﻟمﻘياس ﺑوردون وأﻧﺑوب اﻟﺷﻌري ب اﻟﺑﺻيﻠﺔ ﻓﻲ اﻟﺳائل ﺣرارة درﺟﺔ ﻋﻠﻰ يﻌﺗمد اﻟﻧظام.ﺑاﻟدرﺟات اﻟضغط مﻘياس ﺗدريج ﺗﻘﺳيم يﺗم اﻟمئويﺔ.اﻟﻛﺗﻠ اﻟمﺧطط أرﺳمﻲﻟﻠﻧظام،اﻟضغط ﻟمﻘياس اﻟرئيﺳيﺔ ﻟﻠمﻛوﻧات ًالﻛﺗ ًامﺗضمﻧ.أن يﺟب ھﻧا ﺗﻛونمﻘدارھا ﺗغيير أو مﺧﺗﻠف ﺷﻛل إﻟﻰ اﻹﺷارة ﺑﺗغيير ﺗﻘوم مﻛوﻧﺔ ﻟﻛل ﻛﺗﻠﺔ ﻟك. أ.اﻟﻛﺗﻠ اﻟمﺧطط ﻋﻠﻰ ح ِّوضﻲاﻟطاﻗﺔ لِّمﺣو،اﻟﻌرض ووﺣدة اﻹﺷارة مﮭيئ. ب.اﻟﻧظام ﻓﻲ م ِّاﻟمضﺧ ح ِّوض. ( رقم شكل3.31) 20( رﻗم اﻟﺷﻛل .3.32ﻛﮭرﺑائيﺔ مﻧظومﺔ ح ُِّوضي ).ﺗﺣويﻠﮭا ﻋامل أوﺟد.
- 76. 21( رﻗم اﻟﺷﻛل .3.33مرﺣل يوضح )ھيدروﻟيﻛﻲومضائل وﻛﺗﻠﺔ ياي ﺑﻌﻧﺻر مﺗﺻل.مﻌدل ھو اﻟمﻛﺑس اﺳطواﻧﺔ إﻟﻰ اﻟزيت اﻧﺳيابqاﻟﺻمام إزاﺣﺔ ﻓﻲ ًامضروﺑ.أو اﻟﺗﺣويل ﻋامل أوﺟد اﻟمﻧظومﺔ ﻟﮭذه اﻻﻧﺗﻘال. ( رقم شكل3.32) ( رقم شكل3.33) 22اﻟ .( رﻗم ﺷﻛل3.34ھ ًاﻛﺑاﺳ ح ُِّوضي )يﻛون ﻋﻧدما .ﺗأرﺟﺣﻲ ﺑﺻمام ﻓيه اﻟﺗﺣﻛم يﺗم ًايدروﻟيﻛي اﻟﻛﺑاس مﻘطﻊ مﺳاﺣﺔ .اﻻﺳطواﻧﺔ طرﻓﻲ ﻋﻧد اﻟﺳريان يﻘف األوﺳط وضﻌه ﻓﻲ اﻟﺻمام0.002m2 األوﺳط وضﻌه من اﻟﺻمام يﺗﺣرك وﻋﻧدما،ھو األﺳطواﻧﺔ داﺧل إﻟﻰ اﻟزيت ﺳريان مﻌدل ﻓإن 0.01m3/secاﻟﺻمام يﺗﺣرﻛه مﺗر ﻟﻛل. داﻟﺔ أن وضحاﻟﺻورة ﻋﻠﻰ ﺗﻛون اﻻﻧﺗﻘال أو اﻟﺗﺣويل 𝑘 1+ 𝜏 𝐷 اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضات ذﻛر مﻊ،ﺛم من ﻛل ﻗيمﺔ أوﺟد𝑘 , 𝜏.
- 77. ( رﻗم ﺷﻛل3.34) 23ﺑﻘطر ﻋمود ﻋﻠﻰ رﺑطه يﺗم اﻧفﻌال مﻘياس .10 mmمﻘدار ِّدﺣد مﺣوري ﺣمل ﻋﻠيه طَّﻠﺳُم ﺑاﻟـ اﻟﺣمل𝑘𝑁اآلﺗﻲ ﺑمﻌﻠوميﺔ:اﻟمﻘياس مﻘاومﺔ350أوم،اﻟمﻘياس مﻘاومﺔ ﻓﻲ اﻟﺗغير0.15أوم، اﻟمﻘياس ﻋامل2.02اﻟمروﻧﺔ ومﻌاير207 GN/m2 . 24ﺣرف ﺷﻛل ﻓﻲ زئﺑﻘﻲ ماﻧوميﺗر .∪ﺗفاضﻠﻲ ھواء ضغط ﻟﻘياس يﺳﺗﺧدم.اﺳﺗﺧدم إذا ﻓيما اﻟماﻧوميﺗرزيت مواﺳير ﺧط ﻓﻲ اﻟﺗفاضﻠﻲ اﻟضغط ﻧفس ﻟﻘياس ﺑﻌد،ﻓﻲ اﻟمئوي اﻟفرق أﺣﺳب ﻗراءاتاﻟمـاﻧوميﺗر.ﺑزيت ًاﺗمام مﻠيئﺔ ﻟﻠماﻧوميﺗر اﻟﺗوﺻيل ﺧطوط ﺗﻛون.اﻟزيت ﻛﺛاﻓﺔ ﺗﻛون 800 𝑘𝑔/𝑚3 ﻟﻠزئﺑق وﺗﻠك13600 𝑘𝑔/𝑚3 .اﻟﮭواء ﻛﺛاﻓﺔ ﺗﺟاھل يمﻛن. ِِّ 𝑨𝒏𝒔. (𝒉 𝒐𝒊𝒍 𝒊𝒔 𝟔. 𝟐𝟓% 𝒉𝒊𝒈𝒉𝒆𝒓 𝒕𝒉𝒂𝒏 𝒉 𝒂𝒊𝒓) 25ماﻧوميﺗر .مائل ﺑأﻧﺑوب ﻗاﻋدﺗﮭا ﻋﻧد موﺻﻠﺔ مﻌﺗدﻟﺔ مﻌدﻧيﺔ اﺳطواﻧﺔ من يﺗﻛون مائل أﻧﺑوﺑﻲ ﺑزاويﺔ30األﻓﻘﻲ ﻋﻠﻰ درﺟﺔ.اﻟﻌﻠوي اﻟطرف ﺗوﺻيل ويﺗم ﺑماء اﻟﺟﮭاز ملء يﺗمﻟألﺳطواﻧﺔﺑإمداد ضغط ﻋﻧد ﻏاز500 𝑁/𝑚2 .اﻟمﻘطﻊ مﺳاﺣﺔ وﻧﺳﺑﺔ اﻟﺟو إﻟﻰ مفﺗوح اﻟمائل األﻧﺑوب ﻛان إذا ﻟألﺳطو اﻟﻌرضﻲھﻲ ﻟألﻧﺑوب اﻟﻌرضﻲ اﻟﻘطﻊ مﺳاﺣﺔ إﻟﻰ اﻧﺔ50: 1.يﺗﺣرﻛﮭا اﻟﺗﻰ اﻟمﺳاﻓﺔ أﺣﺳب اﻟمائل األﻧﺑوب ﻓﻲ اﻟﺳائل مﻧﺳوب.اﻟماء ﻛﺛاﻓﺔ ﺧذ1000 kg/m3 . 𝑨𝒏𝒔. (𝟗𝟖𝒎𝒎) 26اﻟﺳاﺑﻘﺔ اﻟمﺳأﻟﺔ ﻓﻲ اﻟماﻧوميﺗر ﻟﻧفس .،مﻧﺳوب ھﺑوط ﺗﺟاھل ﺗم إذا ﻟﻠﺧطأ اﻟمئويﺔ اﻟﻧﺳﺑﺔ أﺣﺳب .اﻟمﻌدﻧيﺔ اﻻﺳطواﻧﺔ ﻓﻲ اﻟماء 𝑨𝒏𝒔. (𝟒%) 27مﻘداره ًاﺗفاضﻠي ﺳمﺗا لَّﺟﺳ ﺣيث ﺗفاضﻠﻲ ھواء ضغط ﻟﻘياس يﺳﺗﺧدم ﺑﺳيط ماء ماﻧوميﺗر . 200mmماء.مواﺳي ﺧط ﻓﻲ اﻟﺗفاضﻠﻲ اﻟضغط ﻧفس ﻟﻘياس ﺑﻌد من اﻟماﻧوميﺗر اﺳﺗﺧدام ﺗم إذار ماء،اﻟماء ﻋن ًﻻﺑد ﻟﻠماﻧوميﺗر ﻛمائﻊ اﻟزئﺑق ﺑاﺳﺗﺧدام،يﺳﺟﻠه اﻟذي ﻟﻠزئﺑق اﻟﺗفاضﻠﻲ اﻟﺳمت أﺣﺳب اﻟماﻧوميﺗر.اﻟﮭواء ﻛﺛاﻓﺔ أﺧذ يمﻛن1.3 kg/m3 اﻟماء وﻛﺛاﻓﺔ1000 kg/m3 .اﻟﻧوﻋﻲ اﻟﺛﻘل ھو ﻟﻠزئﺑق13.6. 𝑨𝒏𝒔. (𝟗𝟖𝒎𝒎)
- 78. 28ﻟﻘياس ﺑوردون ﺟﮭاز ومﻛوﻧات ﺗﺷغيل مﺑدأ اﻟﺗوضيﺣيﺔ ﺑاﻟرﺳومات ًامﺳﺗﻌيﻧ أوﺻف .أ . اﻟضغط. واﺣﺳب ﺑوردون اﻧﺑوب مﻘياس ﻓﻲ اﻟمﺳﺗﺧدمﺔ ﻟﺗﻠك مﺷاﺑﮭﺔ ﺑﻧيون ﺗرس ﺣرﻛﺔ ًاﺗﺧطيط أرﺳم .ب ﺧالل اﻟمؤﺷر ﻋمود يدور ﻟﻛﻲ اﻟمﺣور ﺣول اﻟدائري رﺑﻊ اﻟﺗرس ﺑﮭا يدور اﻟﺗﻰ اﻟزاويﺔ270درﺟﺔ. ﻧﺳﺑھﻲ اﻟدائري رﺑﻊ واﻟﺗرس اﻟﺑﻧيون ﺗرس ﺑين اﻟﺗروس ﺔ1: 15. الموفق وهللا
- 79. والمراجع الكتب العربية والمراجﻊ الكتب: 1ﺟالل .ﻋﺑد اﻟﺣاج،" اﻟميﻛاﻧيﻛيﺔ األﻧظمﺔ ﻓﻲ مُّﻛاﻟﺗﺣ ﻧظريﺔ "،ﻋﺑد اﻟﺣاج ﺟالل موﻗﻊ www.jalalalhajabed،ﻓﺑراير(2010.) 2ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ .،مﺣ مذﻛرة "" وﺗﺣﻛم اﺗوماﺗيﺔ اضرات،اﻟﻧيل وادي ﺟامﻌﺔ، واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1994م.) 3ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ .،" اﻟﮭﻧدﺳيﺔ اﻟﻘياس أﺟﮭزة مﺣاضرات مذﻛرة "،وادي ﺟامﻌﺔ اﻟﻧيل،واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1993م.) 4ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ .،" اﻟﺗﺣﻛم ھﻧدﺳﺔ مﺣاضرات مذﻛرة "،اﻟﻧيل وادي ﺟامﻌﺔ، واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1995م.) 5اﻟﻠﺣياﻧﻲ ﺣميد ﺑن ﺳﻌود .،" اﻟﻘياس أﺟﮭزة "،اﻟﻘرى أم ﺟامﻌﺔ،اﻟﺗطﺑيﻘيﺔ اﻟﻌﻠوم ﻛﻠيﺔ،ﺷﻌﺑﺔ .اﻟطﺑيﺔ اﻟفيزياء 6ﺻديق ھاﺷم مﺣمد .،" اﻟموائﻊ ميﻛاﻧيﻛا "،اﻟﻛﺗاﺑيﺔ اﻹﺻدارة،(2016م.) 7ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ .،ﺗﺣﻛم وھﻧدﺳﺔ ﻗياس أﺟﮭزة ﻓﻲ مﺳائل ﺣﻠول ﻛﺗاب "(اﻟﺟزء اﻟﺛاﻧﻲ)"،اﻟﻧيل وادي ﺟامﻌﺔ،واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(2016م.) 8اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة .،" اﻟفﻧيﺔ اﻟﻘياﺳات ﻛﺗاب "،اﻟﺳﻌوديﺔ اﻟﻌرﺑيﺔ اﻟممﻠﻛﺔ. 9اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة .،" اآلﻟﻲ اﻟﺗﺣﻛم ﺗﻘﻧيﺔ ﻛﺗاب "،اﻟممﻠﻛاﻟﻌرﺑيﺔ ﺔ اﻟﺳﻌوديﺔ. 10اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة .،ﻛﺗاب "اﻟمﺑرمج اﻟﺗﺣﻛم ﺗﻘﻧيﺔ"،اﻟﻌرﺑيﺔ اﻟممﻠﻛﺔ اﻟﺳﻌوديﺔ. 11اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة .،ﻛﺗاب "وﺧواﺻﮭا اﻟﺻﻧاﻋيﺔ اﻟﺗﺣﻛم ﻧظم"،اﻟممﻠﻛﺔ اﻟﺳﻌوديﺔ اﻟﻌرﺑيﺔ. اإلنجليزية والمراجﻊ الكتب: 1. Larry Caretto , " Introduction to Fluid Statics and Manometers " , California State University , Northridge , January (2008). 2. Atherton D. P., “Nonlinear Control Engineering”, Van Nostrand Reinhold, London, (1982). 3. Burns R. S. , " Intelligent Manufacturing " , Journal of Aircraft Engineering and Aerospace Technology , MBC University Press , 69 (5) , (1997) , PP. (440 – 446). 4. L. Michalski , K. Eckersdorf , J. Kucharski , J. McGhee , " Temperature Measurement " , Second Edition , John Wiley and Sons Ltd , (2001).
- 80. 5. McGhee T. D. , " Principles and Methods of Temperature Measurement " , John Wiley and Sons Ltd , New York , (1988). 6. Diamond J. M. , " Linearization of Resistance Thermometers and other Transducers " , Rev. SC. Instr. 41 (1) , (1970) , PP. (53 – 56). 7. Peter Grogono, “Control Systems”, December (2003). 8. P. R. Wiederhold , " Water Vapor Measurement , Methods and Instrumentation " , Marcel Dekker , New York , (1997). 9. Morrison G. L. and et al. , " Five Hole Pressure Probe Analysis Technique " , Flow Measurement and Instrumentation , Vol. 9 , No. 3 , (1998) , PP. (153 – 158). 10. Matthias Nau, “Electrical Temperature Measurement with Thermocouples and Resistance Thermometers”, M. K. Juchheim, August (2002). 11. Joseph J. Distefano , " Feedback and Control Systems " , Schaum's Outline of Theory and Problems , Second Edition , McGraw Hill , New York , (1990). 12. Kopecky F. and et al., “Exercise from Physics for Students of Pharmacy”, Bratislava, UK, (1990). 13. John Hannah, Richmond Courtney Stephens, " Mechanics of Machines: Elementary Theory and Examples “, Volume 1, (1984). 14. Bela G. Liptak, “Process Control, CRC Press, New York, (1999). 15. Yunus A. Cengel and John M. Cimbala, " Solutions Manual for Fluid Mechanics: Fundamentals and Applications " , Second Edition , McGraw Hill , (2010). 16. Csala Hos , and Botond Erdos , " Introduction to Mechanical Engineering Lecture Notes " , December (2011).
- 81. الثاني القسم مقدمة ھذا يﮭدفاﻟﻛﺗاب من اﻟﻘﺳمأو اﻟﺗﺣﻛم وأﻧظمﺔ ،اﻟﮭﻧدﺳيﺔ اﻟﻘياس أﺟﮭزة ﻋﻠﻰ اﻟﺗﻌرف أھميﺔ ﻟﺗأﻛيد اﻟﺳيارات مُﻛَّﺣﺗ ﻟوﺣات ﻓﻲ اﻟموﺟودة اﻟﺳيطرة،.واﻟمﺻاﻧﻊ اﻟماﻛيﻧات ويﺣﺗويھذاﻋﻠﻰ اﻟﻘﺳمﻓﺻول ﺛالﺛﺔ،من اﻟذاﺗﻲ اﻟﺗﺣﻛم ألﻧظمﺔ مدﺧل ﻋﻠﻰ األول اﻟفﺻل يﺷﺗمل أﻧواﻋﮭا ﺣيث،ﻛﺗﻠيﺔ مﺧططات ﺷﻛل ﻓﻲ ﺗمﺛيﻠﮭا،اﺳﺗﺟاﺑﺔ ﻋﻠﻰ ﻓيﺷﺗمل اﻟﺛاﻧﻲ اﻟفﺻل أما .ﻋﻧاﺻرھا اﻧﺣدار ﺑدوال بَّﻛرُم أو أﺳﻲ رُﺧﺗأ ﻛوﻧﮭا ﺣيث من اﻟﻌﻧاﺻر،ﺧطوة،دﻓﻊ،.ﺟيﺑيﺔ أو ﺗواﻓﻘيﺔ وداﻟﺔ واﻟمرﻛب األﺳﻲ اﻟﺗأﺧر ﻟﻌﻧاﺻر اﻟمﺣﻠوﻟﺔ واألمﺛﻠﺔ اﻟمﺳائل من اﻟﻌديد ًاأيض اﻟﺛاﻧﻲ اﻟفﺻل يﺗضمن. أﺳﻠوب مﺛل اﻟﺗﺣﻛم ﻧظم اﺳﺗﻘرار من اﻟﺗﺣﻘق ﻓﻲ اﻟمﺳﺗﺧدمﺔ اﻟﺗﻘﻧيات ﺑﻌض اﻟﺛاﻟث اﻟفﺻل يﺳﺗﻌرض ( اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل رﺳمPlotting root locus 𝑖. 𝑒.راوث وأﺳﻠوب ) ( ﻟالﺳﺗﻘرارRouth stability criterion 𝑖. 𝑒.).اﻟمﺳائل من اﻟﻌديد ھﻧاﻟك اﻟفﺻل ھذا ﻧﮭايﺔ وﻓﻲ و.اﻟمﺣﻠوﻟﺔ األمﺛﻠﺔ اﻻﺳﺗﻘرار ﺗﻘييم من اﻟطالب ﻟﺗمﻛين اﻟﻛالﺳيﻛيﺔ اﻟﺗﺣﻛم ﻧظريﺔ ﻟﺗغطيﺔ اﻟﻛﺗاب ھذا ُفديﮭ،اﻟدﻗﺔ اﻟﺗﺣﻛم ﻟﻧظم اﻟﻌمﻠيﺔ ﻟﻠﺗﻘﻧيﺔ ﺧاﺻﺔ ﺑمرﺟﻌيﺔ ﻟﻠﻧظام اﻻﺳﺗﺟاﺑﺔ وﺳرﻋﺔ. :ﻋﻠﻰ ًاﻗادر اﻟطاﻟب ﺟﻌل ھﻲ األﺳاﺳيﺔ اﻟﻛﺗاب ھذا أھداف من 1ﻗيا ﻟﻧظام رياضﻲ ﻧموذج ﺻياﻏﺔ ]ﺗﺣﻛم أو س(𝑖. 𝑒.ميﻛاﻧيﻛيﺔ أﻧظمﺔ،ھيدروﻟيﻛيﺔ،ﻧيوماﺗيﺔ، ﺛيرموديﻧاميﻛيﺔ،)وﻛﮭرﺑائيﺔ. 2اﻟﺣﻠﻘﺔ مغﻠﻘﺔ أو مفﺗوﺣﺔ ﻟﻧظم اﻟﻛﺗﻠيﺔ اﻟمﺧططات ﺗمﺛيل ]،ﺻﻠﺔ َّمو ﻟﻌﻧاﺻر اﻹﻧﺗﻘال دوال وإيﺟاد ھﺟين ﻋﻧاﺻر أو اﻟﺗوازي أو اﻟﺗواﻟﻲ ﻋﻠﻰ. 3اﻻﻧﺣدار ﻟدوال اﻟزمﻧيﺔ اﻻﺳﺗﺟاﺑﺔ إيﺟاد ]،اﻟﺧطوة،اﻟدﻓﻊ،ﻟﻧظم اﻟﺟيﺑيﺔ أو اﻟﺗواﻓﻘيﺔ واﻟدوال .ومرﻛب أﺳﻲ ﺗأﺧر 4( اﻟﺗردديﺔ اﺳﺗﺟاﺑﺗه من ﻟﻧظام اﻻﺳﺗﻘرار ﺷرط ﺗﺣديد ]𝑖. 𝑒.ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل رﺳم أﺳﻠوب .)اﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق راوث وأﺳﻠوب اﻟﺧاﺻيﺔ مﻌادﻟﺔ 5أد ﻟﺗﺣﺳين ﻟﻠﺧطأ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﺗﻌويض ].اﻟﺗﺣﻛم ﻧظام اء 6ﻋاﻟي اﻟﺗﻘﻧيات ﺗطﺑيق ]ﺔاﻟوضﻊ ﻓﻲ اﻟﺗﺣﻛم ﻟذﻟك ﻛمﺛال ﻋمﻠﻲ ﻟﻧظام،اﻟضغط،اﻟﺣرارة درﺟﺔ، .اﻟﺳوائل مﻧاﺳيب ﻓﻲ واﻟﺗﺣﻛم اﻟموائﻊ ﺳريان 7ديﻧاميﻛيﺔ اﺳﺗﺟاﺑﺔ ذات ﻟمﺳائل اﻟﺗﺣﻛم وﻧظريﺔ اﻟميﻛاﻧيﻛا مﺑادئ ﺗطﺑيق ]،واﻟﺗﺣﻛم اﻻﺳﺗﻘرار ﻟﻠمرﻛﺑات اﻟﺣرﻛﺔ ﻓﻲ.اﺧ يﺗماﻟمرﻛﺑات واﺳﺗﻘرار اﻟديﻧاميﻛا مﺛل مواضيﻊ من اﻟﺗطﺑيﻘات ﺗيار واﻟطائرات. اﻟموﻓق وهللا.
- 82. األول الفصل الذاتي التحكم ﻷنظمة مدخل (Introduction to Automatic Control Systems) 1.1مدخل(Introduction): اﻟذاﺗﻲ اﻟﺗﺣﻛم ﻧظم ﺗﺳﺗﺧدماﻟﺣرارة درﺟﺔ ﻓﻲ اﻟﺗﺣﻛم ﻓﻲ،اﻟضغط،اﻟﺳريان مﻌدﻻت،مﻧاﺳيب األﺳاﺳيﺔ اﻟمﺣرﻛات وﺳرﻋﺔ ،اﻟﻛيميائﻲ اﻟﺗرﻛيب ،اﻟﺳوائل،واﻟطائرات اﻟﺳفن وضﻊ ﺗﺣديد،ﺗوﺟيه اﻟرادارات،.ﻏرﻓﺔ ﻓﻲ اﻻﺳﺗضاءة وﺷدة ،ﺑاﻟماﻛيﻧات اﻟﺗﺷغيل ﻋمﻠيات ﺳرﻋﺔ ﻓﻲ اﻟيدوي اﻟﺗﺣﻛم ﻋن اﻟذاﺗﻲ اﻟﺗﺣﻛم ﻧظم وﺗﺗميزواﻟﺗواﻓق اﻻﺳﺗﺟاﺑﺔﻋﻠﻰ واﻟﻘدرة واﻟدﻗﺔ اﻟظروف مﺧﺗﻠف ﻓﻲ طويﻠﺔ ﻟفﺗرات مﺳﺗمرة ﺑﺻفﺔ اﻟمﻧاﺳب ﺑاﻟﺗﺣﻛم واﻻﺣﺗفاظ اﻟﺗﻧﺑؤاﻟﻘدرة وﻛذﻟك .ﻟﻠﻘدرة ضﻌيفﺔ مﺻادر من اﻟﻧاﺗﺟﺔ اﻟطاﻗﺔ من ھائﻠﺔ ﻛميات ﻓﻲ اﻟﺗﺣﻛم ﻋﻠﻰ 1.2اﻟﺗﺣﻛم أﻧظمﺔ أﻧواع(Types of Control Systems:) ﻧوﻋان ھﻧاﻟك:اﻟﺗﺣﻛم ﻧظم من 1مفﺗوﺣﺔ ﺣﻠﻘﺔ ذو ﺗﺣﻛم ﻧظام .(Open-Loop Control System:) اﻟمﻧظم ﻓﻲ ما ﻟﻧظام األداء مﺗطﻠﺑات ضﺑط ﺗم إذا،اﻟمطﻠوﺑﺔ اﻟوظيفﺔ ﺑأداء ﺳﺗﻘوم اﻟماﻛيﻧﺔ ﻓإن اﻟماﻛيﻧﺔ ﻓﮭذه .اﻟمالﺑس أو األطﺑاق ﻏﺳيل ماﻛيﻧﺔ ﻟذﻟك مﺛال ،اﻟمﺧرج ﻋﻧد اﻟﻧﺗيﺟﺔ ﻋن اﻟﻧظر ﺑﺻرف ﺗﺑ ﺗﻌملﺑداﺧﻠﮭا اﻟﺗﻲ اﻟمﺣﺗويات ﺣاﻟﺔ ﻋن اﻟﻧظر ﺑﺻرف مﻧﮭا طﻠﺑت اﻟﺗﻲ اﻟﺗﺷغيل ﻟدورة ًاﻌ،وﺗﺳمﻰ ( األمامﻲ اﻟمﺳار ذات اﻟﺗﺣﻛم ﻧظم أو اﻟﺣﻠﻘﺔ مفﺗوﺣﺔ اﻟﺗﺣﻛم ﺑﻧظم اﻟﻧظم ھذه مﺛلforward-path control system)،ﺳاﻋﺔ ﺑواﺳطﺔ اﻟﺷوارع ﻟمﺑات أو اﻟمرور ﻟوﺣات إضاءة ﻓﻲ آﺧر مﺛال (Control of street lamp by a clock). ( رﻗم اﻟﺷﻛل1.1م ﺗمﺛيل يوضح أدﻧاه ).مفﺗوﺣﺔ ﺣﻠﻘﺔ ذو ﺗﺣﻛم ﻟﻧظام ﺧططﻲ ( رقم شكل1.1الحلقة مﻔتوح تحكم نظام ) 2مغﻠﻘﺔ ﺣﻠﻘﺔ ذو ﺗﺣﻛم ﻧظام .Closed Loop Control System):)
- 83. )ﻟﻠمﺗغير اﻟفﻌﻠيﺔ (اﻟﻘيمﺔ اﻟﻧظام مﺧرﺟات مراﻗﺑﺔ يﺗم𝜃0ﺑمدﺧالت ومﻘارﻧﺗﮭا ﺑاﺳﺗمرار ﻗياﺳﮭا أي )اﻟمرﻏوﺑﺔ أو اﻟمطﻠوﺑﺔ (اﻟﻘيمﺔ اﻟﻧظام𝜃𝑖اﻟمﺧرج ﻋﻧد اﻟﻧﺗيﺟﺔ وﺗﺻﺣيح.ﺗغذيﺔ ھﻧاﻟك يﻛون ﻋﻠيه ( مرﺗدةfeed back.اﻟﺣﻠﻘﺔ مغﻠق ﺑﻧظام اﻟﻧظام ھذا يﺳمﻰ و اﻟﺣاﻟﺔ ھذه ﻓﻲ ) (ًامﺗﻘطﻌ يﻛون أن يمﻛن اﻟﺣﻠﻘﺔ مغﻠق اﻟﺗﺣﻛم ﻧظامintermittent)( ًامﺳﺗمر أوcontinuous)، ( اﻟﺛيرموﺳﺗات ھو اﻟمﺗﻘطﻊ ﻟﻠﻧظام مﺛالthermostatاﻟﺗﺑريد ماء ﺣرارة درﺟﺔ ﺑضﺑط يﻘوم اﻟذي ) اﻟمﺣرك اﺳطواﻧﺔ ﻓﻲ.درﺟﺔ ﺑﻘاء ﻋﻠﻰ يﻌمل ﺑطيئﺔ اﺳﺗﺟاﺑﺔ ذو ﻓﻘط وﻏﻠق ﻓﺗح ﻧظام اﻟواﻗﻊ ﻓﻲ وھو ھذ مﺛل وﺗوﺟد اﻟﺛيرموﺳﺗات ﻟﺣﺳاﺳيﺔ ًاﺗﺑﻌ ﻗيمﺗين ﺑين اﻟﺣرارةوأﺟﮭزة اﻟﺗﺑريد وﺣدات ﻓﻲ اﻟﻧظم ه اﻟمرﻛزيﺔ اﻟﺗدﻓئﺔ،اﻟﻛارﺑوريﺗر ھﻲ اﻟمﺳﺗمر اﻟﻧظام وأمﺛﻠﺔاﻟﺧالط أو (اﻟمغذي).اﻟميﻛاﻧيﻛﻲ واﻟﺣاﻛم ( رقم الشكل1.2مغلقة حلقة ذو تحكم لنظام كتلي مخطط يوضح أدناه ). ( رقم شكل1.2مغلقة حلقة ذو تحكم لنظام كتلي مخطط ) 1.3اﻟﻧظام ﺗمﺛيل(System Representation): اﻟﻌﻧاﺻر من ﻋدد من اﻟﻧظام يﺗﻛون،ﻛل ﻓيه لَّﺛٌمي وظيفﻲ ﺑمﺧطط ﺑيﻧﮭا اﻟﻌالﻗﺔ ﺗوضيح يمﻛن ﺑمﺳﺗطيل ﻋﻧﺻر،اﻟﺳيارة ﻟﻧظام اﻟﺟوھريﺔ ﻓاﻟﺳماتاﻟوﻗود مﺟموﻋﺔ ﻓﻲ ﺗﺗمﺛل،اﻟمﺣرك،ﺻﻧدوق اﻟفرﻗيﺔ اﻟﺗروس ومﺟموﻋﺔ اﻟﺗروساﻟﺗﺷغيل مراﺣل َّحيوض ﺗﺧطيطﻲ ﺑرﺳم ﺗمﺛل وﻛﻠﮭا (schematic representation( رﻗم اﻟﺷﻛل ﻓﻲ ﻛما )1.3مﻌدل ﻓﻲ اﻟﺗﺣﻛم ان ﺑما ؛ أدﻧاه ) اﻟﺳيارة ﺳائق ﺑه يﻘوم ﺑاﻟوﻗود اﻟﺗغذيﺔ،ًامﺗﻘطﻌ ًامغﻠﻘ يﻛون اﻟﻧظام ﻓإن. ﺑا ﺑاﻧﺗظام اﻻﺣﺗفاظ ﻋﻠﻰ يﻌمل ﺑﺟﮭاز مزودة اﻟﺳيارة ﻛاﻧت إذا أمااﻟمطﻠوﺑﺔ ﻟﺳرﻋﺔ،اﻟﺗﺣﻛم ﻓإن ( رﻗم اﻟﺷﻛل ﻓﻲ ﻛما ًامغﻠﻘ ًامﺳﺗمر اﻟﻧظام ويﺻﺑح اﻟﺳيارة ﺑﺳرﻋﺔ يﺗﺣدد اﻟوﻗود مﻌدل ﻓﻲ1.4.أدﻧاه )
- 84. ( رقم شكل1.3متقطﻊ مغلق تحكم نظام ) ( رقم شكل1.4مستمر مغلق تحكم نظام ) ( رقم الشكل1.5بخارية قدرة لمحطة تحكم لنظام ًاتخطيطي ًارسم يوضح أدناه )Steam power plant):) رقم شكل(1.5بخارية قدرة لمحطة تحكم نظام ) ﻋضو ﺑواﺳطﺔ اﻟﺧاﻧق اﻟﺻمام ﺗﺷغيل ﺗم إذا ًامغﻠﻘ يﺻﺑح وﻟﻛﻧه ًامفﺗوﺣ اﻟﺣاﻟﺔ ھذه ﻓﻲ اﻟﻧظام يﻛون ( اﻟﺣسsensing element.اﻟمﺣطﺔ ﻋﻠﻰ اﻟواﻗﻌﺔ اﻟﺣموﻟﺔ ﺑﺗأﺛير يﻌمل اﻟذي ) 1.4اﻟﺗﺣﻛم ﻧظام ﻋﻧاﺻر(Elements of a Control System): ( رﻗم اﻟﺷﻛل1.2اﻟﺗﺣﻛم ﻟﻧظام األﺳاﺳيﺔ اﻟمﻛوﻧات يوضح ).ﻗيمﺔ ﺟﻌل ھو اﻟﺗﺣﻛم ﻧظام وظيفﺔ 𝜃 𝑜من ﻗريﺑﺔ اﻹمﻛان ﺑﻘدر𝜃𝑖اﻧﺣراف أو ﺧطأ أي وﺗﺻﺣيحﻗيمﺔ ﻓﻲﺑاﻟﺳرﻋﺔ ﻟﻠﻧظام اﻟﺧرج اﻟمطﻠوﺑﺔ.
- 85. 1.4.1اﻟمﺣطﺔ(Plant):ﻓيه يﻌمل اﻟذي اﻟﻌﻧﺻر وھﻲ اﻟﺗﺣﻛم ﻧظام ﻓﻲ األﺳاﺳﻲ اﻟﻌﻧﺻر ھﻲ .اﻟﺗﺣﻛم ﻧظام 1.4.2اﻟمﻧظم(Regulator):ضﺑط إﻟﻰ يؤدي ﺑما اﻟمﺣطﺔ إﻟﻰ اﻟطاﻗﺔ إمداد ﺑﺗﻧظيم يﻘوم .اﻟﺻمام ﻟذﻟك ﻛمﺛال مﻧه اﻟﺧارﺟﺔ اﻟطاﻗﺔ 1.4.3وﺣدةاﻟمراﻗﺑﺔ(Monitor):ﺑﻘياس ﺗﻘوم.ﻓيه اﻟﺗﺣﻛم اﻟمراد اﻟمﺗغير 1.4.4اﻟمﻘارﻧﺔ ﻋﻧﺻر(Comparator)اﻟمطﻠوﺑﺔ واﻟﻘيمﺔ اﻟفﻌﻠيﺔ اﻟﻘيمﺔ ﺑين يﻘارن :ﻟﻠمﺗغير .اﻻﻧﺣراف أو اﻟﺧطأ ويﻌطﻲ 1.5اﻹﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ أو ﻋامل(Transfer Operator or Transfer Function): ﻧﺳﺑﺔ ھو.اﻟزمن ﻓﻲ داﻟﺔ يﻛون ما ﻋادة ﻛامﻠﺔ ﻟمﻧظومﺔ أو ﻓردي ﻟﻌﻧﺻر اﻟدﺧل إﻟﻰ اﻟﺧرج :حيث ≡ 𝑮اﻻﻧﺗﻘال أو اﻟﺗﺣويل داﻟﺔ أو ﻋامل. ≡ 𝜽𝒊مدﺧل𝑖. 𝑒. )اﻟمرﻏوب او اﻟمطﻠوب اﻟمﺗغير أو اﻟدﺧل مﺗغير .). ≡ 𝜃 𝑜مﺧرج𝑖. 𝑒. ).)اﻟفﻌﻠﻲ اﻟمﺗغير أو اﻟﺧرج مﺗغير . 𝑮 = 𝜃 𝑜 𝜽𝒊 ،االنتقال أو التحويل دالة او عامل
- 86. الثاني الفصل العناصر استجابة(Response of Elements): 2.1:األﺳﻲ اﻟﺗأﺧر داﻟﺔ او ﻋامل ذات اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ (Response of Exponential Lag Elements) 2.1.1( اﻻﻧﺣدار داﻟﺔRamp Function:) 𝑇. 0 = 𝐺 = 𝜃 𝑜 𝜃 𝑖 = 1 1+𝜏𝐷 ،االنتقال أو التحويل عامل (1 + 𝜏𝐷) 𝜃 𝑜 = 𝜃𝑖 𝜃𝑖 = 𝑘𝑡 (1 + 𝜏𝐷) 𝜃 𝑜 = 𝑘𝑡 𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝑘𝑡 → (1) = الخاص التكامل + المتممة الدالة= 𝑷𝑰 + 𝑪. 𝑭الكامل الحل ( المستقرة الحالةP.I): 𝜃 𝑜 = 𝑘𝑡 + 𝑄 𝐷𝜃 𝑜 = 𝑑𝜃 𝑜 𝑑𝑡 = 𝑘 ( المعادلة في بالتعويض1) 𝑘𝑡 + 𝑄 + 𝜏𝑘 = 𝑘𝑡 ∴ 𝑄 = 𝑘𝑡 − 𝑘𝑡 − 𝜏𝑘 ∴ 𝑄 = −𝜏𝑘 ∴ 𝑃. 𝐼, 𝜃 𝑜 = 𝑘𝑡 − 𝜏𝑘 = 𝑘( 𝑡 − 𝜏) ( المستقرة غير الحالةC.F): 𝜃 𝑜 + τ𝐷𝜃0 = 0 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 .ﺷﻛﻠه ﻓﻲ ﺗغيير دون اﻟمرات من ﻋدد أي ﺗفاضﻠه يمﻛن اﻟذي اﻟدوال من اﻟوﺣيد اﻟﻧوع ھو ھذا 𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡
- 87. ∴ 𝑅𝑒 𝑠𝑡 + 𝜏𝑆𝑅𝑒 𝑠𝑡 = 0 𝑅𝑒 𝑠𝑡(1 + 𝜏𝑆) = 0 ∴ τ𝑆 = −1 ∴ 𝑆 = − 1 𝜏 ∴ C. F, 𝜃 𝑜 = 𝑅𝑒 −𝑡 𝜏⁄ :الكامل الحل 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 𝜃 𝑜 = 𝑘( 𝑡 − 𝜏) + 𝑅𝑒 −𝑡 𝜏⁄ اﻟﺣدوديﺔ اﻟﺷروط(Boundary Conditions): ﻋﻧد𝑡 = 𝑜،و𝜃 𝑜 = 0 0 = 𝑘(0 − 𝜏) + 𝑅 0 = −𝑘𝜏 + 𝑅 ∴ 𝑅 = 𝑘𝜏 𝜃 𝑜 = 𝑘( 𝑡 − 𝜏) + 𝑘𝜏𝑒 −𝑡 𝜏⁄ ∴ 𝜃 𝑜 = 𝑘𝑡 − 𝑘𝜏 + 𝑘𝜏𝑒 −𝑡 𝜏⁄ = k [𝑡 − 𝜏 + 𝜏𝑒 −𝑡 𝜏⁄ ] = k [𝑡 − 𝜏 (1 − 𝑒 −𝑡 𝜏⁄ )] 𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃 𝑜 = 𝑘𝑡 − 𝑘( 𝑡 − 𝜏) = 𝑘𝑡 − 𝑘𝑡 + 𝑘𝜏 = 𝑘𝜏،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ مﺛال(1): اﻟذاﺗﻲ ﻗﺻوره ﻋزم ًادوار ًاﻋضو يﺣمل إدارة ﻋمود5𝑘𝑔𝑚2 مﻌامل يﻌطﻲ اھﺗزاز ومﺧمد مﻘداره ﻟزج مضاءﻟﺔ2𝑁. 𝑚𝑠/𝑟𝑎𝑑ﻟﻠﻌالﻗﺔ ًاﺗﺑﻌ ﺑإﻧﺗظام يزداد ﻋزم ﺗﺳﻠيط ﺗم إذا𝑇 = 1.2𝑡𝑁. 𝑚 اﻟدوار اﻟﻌضو ﻋﻠﻰ،ﺑﻌد إﻟيﮭا اﻟوﺻول يمﻛن اﻟﺗﻲ اﻟﺳرﻋﺔ ھﻲ وما ،اﻟزمن ﺛاﺑت ﺣدد3𝑠.
- 88. اﻟﺣل: التعجيل عزم5Dω N. m = I 𝑑𝜔 𝑑𝑡 = 𝐼𝛼 = المضاءلة عزم2𝜔 𝑁. 𝑚 = 𝐶𝜔 = المسلط العزم 𝑇 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 = (5𝐷𝜔 + 2𝜔) 𝑁. 𝑚 𝑇 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 = (5𝐷 + 2) 𝜔 ∴ 𝑇 𝜔 = 5𝐷 + 2 ∴ 𝜔 𝑇 = 1 2 + 5𝐷 = 0.5 1 + 2.5𝐷 الزمن ثابت فإن وهكذا( 𝛕)والكسبk: τ = 2.5𝑆 𝑘 = 0.5 اﻧﺣدار ﻟداﻟﺔ اﻟدوار اﻟﻌضو يﻌرض ﻋﻧدما𝑇 = 1.2𝑡 𝑁. 𝑚 ﻓإن: ω = 1.2𝑡 × 0.5 1 + 2.5𝐷 𝜃 𝑜 = 𝑘 [𝑡 − 𝜏 (1 − 𝑒 −𝑡 𝜏⁄ )] 𝜃𝑖 = 𝑘𝑡 𝐷𝜃𝑖 = 𝜛𝑖 = 𝑘
- 89. ω = اﻹضاﻓﻲ اﻟمﻧظومﺔ ﻛﺳب × ﻛﺳب اﻟمﻧظومﺔ × [𝑡 − 𝜏(1 − 𝑒 −𝑡 𝜏⁄ )] ω = 1.2 × 0.5 [𝑡 − 2.5 (1 − 𝑒 −𝑡 2.5⁄ )] ﻋﻧد𝑡 = 3𝑠 𝜔 = 0.6 [3 − 2.5 (1 − 𝑒 −3 2.5⁄ )] = 0.752 𝑟𝑎𝑑/𝑠 2.1.2اﻟﺧطوة داﻟﺔ(Step Function): اﻟﺧطوة ﻟداﻟﺔ األوﻟيﺔ اﻟﺷروط: 𝜃𝑖 = 0, at t < 0 𝜃𝑖 = 𝑘 , 𝑎𝑡 𝑡 ≥ 0 𝑇. 0 = 𝐺 = 𝜃 𝑜 𝜃𝑖 = 1 1 + 𝜏𝐷 (1 + 𝜏𝐷) 𝜃 𝑜 = 𝜃𝑖 𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝜃𝑖 " اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔSteady State( "P.I) 𝜃 𝑜 = 𝑘 " اﻟمﺳﺗﻘرة ﻏير اﻟﺣاﻟﺔTransient State( "C.F) 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡 𝑅𝑒 𝑠𝑡 + 𝜏𝐷𝑅𝑒 𝑠𝑡 = 0 𝑅𝑒 𝑠𝑡(1 + 𝜏𝑠) = 0 τs = −1 ، ∴ s = − 1 𝜏 ∴ 𝜃 𝑜 = 𝑅𝑒 −𝑡 𝜏⁄ اﻟﻛامل اﻟﺣل: 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 𝜃 𝑜 = 𝑘 + 𝑅𝑒 −𝑡 𝜏⁄ اﻟﺣدوديﺔ اﻟﺷروط"B. Conditions": ﻋﻧد𝜃 𝑜 = 0 , 𝑡 = 0 0 = 𝑘 + 𝑅 ∴ 𝑅 = −𝑘
- 90. ∴ 𝜃 𝑜 = 𝑘 − 𝑘𝑒 −𝑡 𝜏⁄ = 𝑘 (1 − 𝑒 −𝑡 𝜏⁄ ) .اﻻﻧﺣدار ﻟداﻟﺔ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﻋن ﻋﺑارة ھﻲ اﻟﺧطوة داﻟﺔ ( مﺛال2:) ( مؤازرة مﻧظومﺔ ﻓﻲservo- systemاﻟزاوي اﻟوضﻊ ﻓﻲ ﺗﺗﺣﻛم )( ار َّدو ﻟﻌضوrotor)، ﻗدره ًاﺧرﺟ اﻟﺧطوة دﺧل إﺷارة ﻌطﻲُﺗ0.5 𝑟𝑎𝑑ﺑﻌد4𝑠ﻗدره ًاوﺧرﺟ0.7 𝑟𝑎𝑑ﺑﻌد4𝑠إضاﻓيﺔ. ﻟﻠمﻧظومﺔ اﻟزمن ﺛاﺑت أوﺟد،مﻘداره ﺧرج ﻟﺗﺣﻘيق اﻟزمن وإﺟماﻟﻲ0.8 𝑟𝑎𝑑. اﻟﺣل: اﻟﺧطوة ﻟداﻟﺔ اﻟﻛامل اﻟﺣل: 𝜃 𝑜 = 𝜃𝑖 (1 − 𝑒 −𝑡 𝜏⁄ ) ﻋﻧد𝜃 𝑜 = 0.5𝑟𝑎𝑑 ، 𝑡 = 4𝑠 0.5 = 𝜃𝑖 (1 − 𝑒 −4 𝜏⁄ ) → (1) ﻋﻧد𝜃 𝑜 = 0. 7 rad ، 𝑡 = 8𝑠 0.7 = 𝜃𝑖 (1 − 𝑒 −8 𝜏⁄ ) → (2) ( المعادلة بقسمة2( المعادلة علﻰ )1:) 0.7 0.5 = 𝜃𝑖 (1 − 𝑒 −8 𝜏⁄ ) 𝜃𝑖(1 − 𝑒 −4 𝜏⁄ ) ﺑوضﻊ𝑒 −4 𝜏⁄ = 𝑛: ∴ 𝑒 −8 𝜏⁄ = 𝑛2 7 𝑆 = 1 − 𝑒 −8 𝜏⁄ 1 − 𝑒 −4 𝜏⁄ = 1 − 𝑛2 1 − 𝑛 ∴ 7 − 7𝑛 = 𝑆 − 𝑆𝑛2 𝑆𝑛 2 − 7𝑛 + 2 = 0 ( 𝑆𝑛 − 2)( 𝑛 − 1) = 0
- 91. 𝑛 = 0.4 أو 𝑛 = 1 إما ∴ ﻋﻧد𝑛 = 1، 𝑛 = 𝑒 −4 𝜏⁄ = 1 ln 𝑒 −4 𝜏⁄ = ln 1 −4 𝜏 𝑙𝑛𝑒 = ln 1 −4 𝜏 = ln 1 ln 𝑒 1 τ = ln1 lne × − 1 4 = 0 ∴ τ = ∞()مرﻓوضﺔ ﻋﻧد، 𝑛 = 0.4 𝑛 = 𝑒 −4 𝜏⁄ = 0.4 Ln𝑒 −4 𝜏⁄ = Ln0.4 −4 𝜏 𝐿𝑛𝑒 = 𝐿𝑛0.4 −4 𝜏 = 𝐿𝑛0.4 𝐿𝑛𝑒 1 𝜏 = − 1 4 × 𝐿𝑛0.4 𝐿𝑛𝑒 = − 1 4 × 0.9163 1 = 0.229 ∴ τ = 1 0.229 = 4.37𝑠 من( المعادلة1:) 0.5 = 𝜃𝑖 (1 − 𝑒 −4 4.37⁄ ) 𝜃𝑖 = 0.5 1 − 𝑒 −4 4.37⁄ = 0.5 0.6 = 0.833 𝑟𝑎𝑑 ﻋﻧد، 𝜃0 = 0.8 𝑟𝑎𝑑 0.8 = 0.833 (1 − 𝑒 −𝑡 4.37⁄ ) 1 − 𝑒 −𝑡 4.37⁄ = 0.8 0.833 −𝑒 −𝑡 4.37⁄ = 0.8 0.833 − 1 ∴ 𝑒 −𝑡 4.37⁄ = 1 − 0.8 0.833 = 0.04
- 92. 𝐿𝑛𝑒 −𝑡 4.37⁄ = 𝐿𝑛0.04 −𝑡 4.37 𝐿𝑛 = 𝐿𝑛 0.04 ∴ 𝑡 = 𝐿𝑛0.04 𝐿𝑛𝑒 × −4.37 = −3.22 × −4.37 = 14.1𝑠 2.1.3اﻟدﻓﻊ داﻟﺔ(Impulse Function): اﻻﻧﺣدار ﻟداﻟﺔ اﻟﺛاﻧيﺔ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ أو اﻟﺧطوة ﻟداﻟﺔ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﻋن ﻋﺑارة وھﻲ. :الدفﻊ لدالة اﻷولية الشروط ∆𝑡 → 0 𝑘 → ∞ 𝜃𝑖 = 0 اﻻﻧﺗﻘال ﻋامل 𝑇. 0 = 1 1 + 𝜏𝐷 𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝜃𝑖 → (∗) اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ"Steady State"(P.I): 𝜃 𝑜 = 0 مﺳﺗﻘرة اﻟال اﻟﺣاﻟﺔ"Transient State"(C.F:) 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡 المعادلة في عاليه القيم بتعويض(∗): 𝑅𝑒 𝑠𝑡 + 𝜏𝑠𝑅𝑒 𝑠𝑡 𝑅𝑒 𝑠𝑡[1 + 𝜏𝑠] = 0 ∴ 𝜏s = −1 ∴ 𝑠 = − 1 𝜏 ∴ 𝜃 𝑜 = 𝑅𝑒 −𝑡 𝜏⁄
- 93. اﻟﻛامل اﻟﺣل:𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 = 0 + 𝑅𝑒 −𝑡 𝜏⁄ = 𝑅𝑒 −𝑡 𝜏⁄ " الحدودية الشروطBoundary Conditions": ﻋﻧد𝑡 = ∆𝑡و𝜃 𝑜 = 𝑘 𝜃 𝑜 = 𝑅𝑒 −∆𝑡 𝜏⁄ = 𝑅 1 𝑒 ∆𝑡 𝜏⁄ = 𝑘 أن وﺑما∆𝑡:َّﻓإن َاﺟد ﺻغيرة ﻗيمﺗﮭا e ∆t τ⁄ = ∆t τ ∴ 𝜃 𝑜 = R ∙ τ ∆t ﻋﻧد𝑡 = 0,𝜃 𝑜 = R = 𝑘 ∴ 𝑘 = 𝑅. 𝜏 ∆𝑡 ∴ 𝑅 = 𝑘 𝜏 . ∆𝑡 ∴ 𝜃 𝑜 = k τ . ∆𝑡𝑒 −𝑡 𝜏⁄ ﻋﻧدما∆t → 1 𝜃 𝑜 = 𝑘 τ 𝑒 −𝑡 𝜏⁄ 2.1.4اﻟمﺧمد ﻏير اﻟﺗواﻓﻘﻲ اﻟدﺧل:اﻟمﺧمد ﻏير اﻟﺟيﺑﻲ اﻟدﺧل أو Undamped Harmonic Input or Undamped Sinusoidal Input)) )أﺳﻲ (ﻟﺗأﺧر𝑇. 0 = 𝜃 𝑜 𝜃 𝑖 = 1 1+𝜏𝐷 𝜃 𝑜 + τ𝐷𝜃 𝑜 = 𝜃𝑖 →∗ θi = sin 𝜔t
- 94. ( اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔP.I:) 𝜃 𝑜 = 𝐴 sin( 𝜔𝑡 − Ψ) 𝐷𝜃 𝑜 = 𝜔𝐴 cos( 𝜔𝑡 − Ψ) اﻟمﻌادﻟﺔ ﻓﻲ ﻋاﻟيﺔ اﻟمﺗغيرات ﺑﺗﻌويض(∗):ﻋﻠﻰ ﺳﻧﺗﺣﺻل 𝐴 sin( 𝜔𝑡 − Ψ) + 𝜏𝜔𝐴 cos( 𝜔𝑡 − Ψ) = sin 𝜔𝑡 𝐴 sin( 𝜔𝑡 − Ψ) + 𝜏𝜔𝐴 sin (𝜔𝑡 − Ψ + 𝜋 2 ) = sin 𝜔𝑡 :فيثاغورث بنظرية A2 + ( 𝜏ωA)2 = 1 𝐴2 + (ωτ)2 A2 = 1 A2 + (1 + ( 𝜔𝜏)2) = 1 𝐴 = 1 √1 + ( 𝜔𝜏)2 𝜃 𝑜 = 𝐴 sin( 𝜔𝑡 − Ψ) ∴ 𝜃 𝑜 = 1 √1 + ( 𝜔𝜏)2 sin( 𝜔𝑡 − Ψ) أﺟﻌلωτ = λ ∴ 𝐴 = 1 √1 + 𝜆2 ( الالمستقرة الحالةC.F:) 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 𝐷𝜃 𝑜 = 𝑠𝑅𝑒 𝑠𝑡
- 95. ∴ 𝑅𝑒 𝑠𝑡 + 𝜏𝑠𝑅𝑒 𝑠𝑡 = 0 τ𝑠 = −1 ، ∴ 𝑠 = − 1 𝜏 ∴ 𝜃 𝑜 = 𝑅𝑒 −𝑡 𝜏⁄ 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹اﻟﻛامل اﻟﺣل 𝜃 𝑜 = 𝐴 𝑠𝑖𝑛( 𝜔𝑡 − 𝛹) + 𝑅𝑒 −𝑡 𝜏⁄ 𝜃 𝑜 = 1 √1 + ( 𝜔𝑡)2 𝑠𝑖𝑛( 𝜔𝑡 − 𝛹) + 𝑅𝑒 −𝑡 𝜏⁄ الشروط" الحدوديةB.C" ﻋﻧد𝐷𝜃 𝑜 = 0، 𝜃 𝑜 = 0، 𝑡 = 0 0 = 𝐴 sin(−𝛹) + 𝑅 0 = −𝐴 sin Ψ + 𝑅 ∴ 𝑅 = 𝐴 sin Ψ 𝐴 = 1 √1 + 𝜆2 sin 𝛹 = τωA 1 = τω × 1 √1 + λ2 ∴ 𝑅 = 𝐴 sin Ψ = 1 √1 + 𝜆2 × 𝜏𝜔 √1 + 𝜆2 = 𝜔𝜏 1 + 𝜆2 = 𝜆 1 + 𝜆2 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹اﻟﻛامل اﻟﺣل 𝜃 𝑜 = 𝐴 sin( 𝜔𝑡 − Ψ) + 𝑅𝑒 𝑠𝑡 ∴ 𝜃 𝑜 = 1 √1 + 𝜆2 sin( 𝜔𝑡 − Ψ) + ωτ 1 + 𝜆2 𝑒 −𝑡 𝜏⁄ مﺛال(3:) ﺑه اﻟمﺣيطﺔ اﻟﺣرارة درﺟﺔ أن ح ُِّوضي زئﺑﻘﻲ ﺛيرموميﺗر20𝑐ο ،ﺣرارﺗه درﺟﺔ ﺳائل ﻓﻲ ﻏمر ﺛاﺑﺗﺔ،:اﻟﺗاﻟﻲ اﻟﻧﺣو ﻋﻠﻰ اﻟﺗغيير ﻓﻲ أﺧذت اﻟﺛيرموميﺗر ﻗراءة أن ﻟوﺣظ وﻗد ( اﻟزمنs)051015202530 ﻗراءة اﻟﺛيرموميﺗر(cο) 20607784878990 اﻟزمن ﺛاﺑت أوﺟدﻟﻠﺛيرموميﺗر.ﻧفس اﺳﺗﺧدمﺳائل ﻓﻲ ﻗراءات ألﺧذ ذﻟك ﺑﻌد اﻟﺛيرموميﺗرﺗﺗغير ًاﺟيﺑي ﺣرارﺗه درﺟﺔ،اﻟﺣرارة درﺟات أن ﻟوﺣظ وﻗدﺣدود ﻓﻲ ﺗﺗغير ﻛاﻧت اﻟمﺳﺟﻠﺔ
- 96. 45.4𝑐 𝜊 و 37.6𝑐 𝜊 اﻟﺗغير دورة ﻛاﻧت ﻋﻧدما25𝑠.درﺟﺔ وأدﻧﻰ ألﻗﺻﻰ اﻟفﻌﻠيﺔ اﻟﻘيمﺔ أوﺟد .ﻟﻠﺳائل ﺣرارة اﻟﺣل: ھﻲ اﻟﺣرارة ﻟدرﺟﺔ ﻗيمﺔ أﻗﺻﻰ أن ح ُِّوضي اﻟﺑياﻧﻲ90𝑐 𝜊ًاﺗﻘريﺑ ∴ 𝜃𝑖 = 90° − 20° = 70° 𝑐 ﺧطوة دﺧل إﺷارة ﻋن ﻋﺑارة وھﻲ، 𝜃 𝑜 = 𝜃𝑖 (1 − 𝑒 −𝑡 𝜏⁄ ) ﻋﻧد𝑡 = 𝜏، 𝜃 𝑜 = θi(1 − e−1) = 0.632𝜃𝑖 ∴ 𝜃 𝑜 = 0.632 × 70 = 44.2℃ اﻟﻘراءة وﺑﺗرﺣيل44.2℃ﻗيمﺗﮭا اﻟﺗﻲ اﻻﺳﻧاد ﻗراءة ﻓوق20℃اﻟﻘراءة حِّﺑﺻُﺗ64.2℃.ﻋﻠيه اﻟﺣرارة ﻟدرﺟﺔ اﻟمﻧاظر اﻟزمن َّﻓإن6𝑠 ھو 64.2℃.اﻟزمن ﺛاﺑت أن أيτيﺳاوي6𝑠. :اﻟمﺧمد ﻏير اﻟﺟيﺑﻲ اﻟدﺧل أو اﻟمﺧمد ﻏير اﻟﺗواﻓﻘﻲ اﻟدﺧل اﺳﺗﺟاﺑﺔ المستقرة الحالة: 𝜃 𝑜 = 𝐴 sin( 𝜔𝑡 − Ψ) 𝜃 𝑜 = 1 √1 + 𝜆2 sin( 𝜔𝑡 − Ψ) 𝜃 𝑜 = 𝑎 √1+𝜆2 = 𝑎 √1+𝜔2 𝜏2 ،ﻟﻠﺧرج اﻻﺳﺗﻘرار ﺳﻌﺔ ھﻲ اﻟﺳﻌﺔ وأن: 45.4 − 37.6 2 = 3.9℃
- 97. َّأن ﺑماθ = ω𝑡، ∴ ω = θ t = 2π 25 = 0.2513 𝑟𝑎𝑑/𝑠 τ = 6𝑠 ∴ 3.9 = 𝑎 √1 + (0.2513 × 6)2 ∴ 𝑎 = 7.06℃ الحرارة درجة متوسط: Tm = 37.6 + 45.4 2 = 41.5℃ ∴الحرارة لدرجة اﻷقصﻰ الحد: Tm𝑎𝑥 = 41.5 + 7.06 = 48.56℃ الحرارة لدرجة اﻷدنﻰ الحد: T 𝑚𝑖𝑛 = 41.5 − 7.06 = 34.44℃ 2.2األﺳﻲ رُّاﻟﺗأﺧ ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ إضاﻓيﺔ أمﺛﻠﺔ: 1اﻟﺷﻛل يﺑين ]ﻓيه اﻟداﺧﻠﺔ اﻟمياه ﻛميﺔ ًاﺻﮭريﺟ أدﻧاه𝒬iمﻧه واﻟﺧارﺟﺔ𝒬oﻓﻲ اﻟﺗﺣﻛم يﺗم ﻟوﻟب ﺑواﺳطﺔ وضﻌﮭا ﺗﻌديل يمﻛن ﻋوامﺔ ﺑاﺳﺗﺧدام وضﻌه يضﺑط ﺻمام ﺑواﺳطﺔ اﻟمياه مﻧﺳوب. اﻟﺻﮭريج إﻟﻰ اﻟمياه ﺗدﻓق يﺗﻧاﺳباﻟﺻﮭريج ﺧارج إﻟﻰ اﻟمياه ﺗدﻓق اﻋﺗﺑار ويمﻛن اﻟﻌوامﺔ ﺣرﻛﺔ مﻊ ﺑه اﻟموﺟودة اﻟمياه مﻧﺳوب مﻊ ًامﺗﻧاﺳﺑ،ًاﺻغير اﻟمﻧﺳوب ﻓﻲ اﻟﺗغير يﻛون ﻋﻧدما وذﻟك. اﻟمياه ﻟمﻧﺳوب اﻟفﻌﻠﻲ اﻟﻌﻠو ﺑين اﻟﻌالﻗﺔ اﺳﺗﻧﺑط،اﻟمطﻠوب اﻟﻌﻠو وﺑيناﻟﻠوﻟب ضﺑط ﺗغيير ﻋﻧد. :اﻟﺣل اﻟفﻌﻠﻲ اﻟﻌﻠو أن ﻧفرضھو اﻟمياه ﻟمﻧﺳوبℎo ھو اﻟمطﻠوب اﻟﻌﻠو َّوأنℎi ھو اﻟمﻧﺳوب ﻓﻲ اﻟﺗغير يﻛون ﻋﻠيهhi − ℎo َّﻓإن اﻟﻌوامﺔ ﺣرﻛﺔ مﻊ ﺗﺗﻧاﺳب اﻟﺻﮭريج إﻟﻰ اﻟداﺧﻠﺔ اﻟمياه ﻛميﺔ أن ﺑما:
- 98. 𝒬iα(hi − ho) ∴ 𝒬i = C1(ℎ𝑖 − ho) ﺣيث𝐶1ﺛاﺑت مﻘدار ﻛميﺔ أن ﻛماﻓيه اﻟمياه مﻧﺳوب ﻋﻠو مﻊ ﺗﺗﻧاﺳب اﻟﺻﮭريج من اﻟﺧارﺟﺔ اﻟمياه،َّأن أي: 𝒬oαℎo ∴ 𝒬o = C2ℎo ﺣيث𝑐2ﺛاﺑت مﻘدار اﻟﺳريان اﺳﺗمراريﺔ مﻌادﻟﺔ من، 𝒬i − 𝒬o = 𝐴𝑣 = 𝐴 𝑑ℎ 𝑜 𝑑𝑡 = 𝐴𝐷ℎ 𝑜 ﺣيث𝐴اﻟﺻﮭريج مﻘطﻊ مﺳاﺣﺔ = ∴ 𝑐1(ℎ𝑖 − ℎ 𝑜) − 𝑐2ℎ 𝑜 = 𝐴𝐷ℎ 𝑜 c1hi − c1ho − c2ho = 𝐴𝐷ℎ 𝑜 c1hi = c1ho + c2ho + 𝐴𝐷ℎ 𝑜 c1hi = ho{ 𝐶1 + C2 + AD} h0 hi = 𝑐1 c1+c2+AD 2ﺗردديﺔ ﺣﻠﻘﺔ ذو ﺑﺻمام ﻓيه اﻟﺗﺣﻛم يﺗم ًاھايدروﻟيﻛي ًاﻛﺑاﺳ أدﻧاه اﻟﺷﻛل يوضح ]،يﻛون ﻋﻧدما اﻻﺳطواﻧﺔ ﻧﮭايﺗﻲ ﻋﻧد اﻟﺳريان يﻘف األوﺳط وضﻌه ﻓﻲ امَّماﻟﺻ.َّاسﺑاﻟﻛ مﻘطﻊ مﺳاﺣﺔ0.003𝑚2 ھو اﻻﺳطواﻧﺔ داﺧل إﻟﻰ اﻟزيت ﺳريان مﻌدل ﻓإن األوﺳط وضﻌه من اﻟﺻمام يﺗﺣرك وﻋﻧدما 0.01𝑚3 /𝑠.اﻟﺻمام يﺗﺣرﻛه مﺗر ﻟﻛل اﻟﺻورة ﻋﻠﻰ ﺗﻛون اﻻﻧﺗﻘال داﻟﺔ أن ح ِّوض ]أ𝑘/(1 + 𝜏𝐷)،ﺛم اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضات ذﻛر مﻊ من ﻛل ﻗيمﺔ أوﺟد𝑘, 𝜏. ﻓﺟأة اﻟذراع ﻧﮭايﺔ ﺗﺣرﻛت إذا ]ب20𝑚𝑚األوﺳط اﻟوضﻊ من،أو اﻟﺣديﺔ اﻻزاﺣﺔ ﻓأوﺟد اﻟﻧﮭائيﺔ،ﺗﻌادل ﻟﺣرﻛﺔ اﻟالزم اﻟزمن وﻛذﻟك85.اﻻزاﺣﺔ ھذه من % ،التحويل عاملاالنتقال أو
- 99. أن ﻧفرض ]أ𝒬اﻟفﺗﺣات من اﻟﺳائل ﺳريان مﻌدل ھو،وأن𝑥مﺣﺻﻠﺔ ھﻲاﻟﺻمام إزاﺣﺔ ∴ 𝒬 = 0.01𝑥𝑚3 /𝑠 𝑥 = 𝑒+ − 𝑒− ،اﻟﺻمام إزاﺣﺔ مﺣﺻﻠﺔ :اﻟمﺛﻠﺛات ﺑﺗﺷاﺑه e+ xi = 80 120 ∴ e+ = 80 120 𝑥i اﻟﺷﻲء ﻧفسe− = 40 120 𝑥0 ∴ 𝑥 = 80 120 𝑥𝑖 − 40 120 𝑥 𝑜 = 40 120 (2xi − xo) = 1 3 (2𝑥𝑖 − 𝑥 𝑜) ∴ 𝒬 = 0.01 3 (2xi − xo) → (1) اﻟﺳريان اﺳﺗمراريﺔ مﻌادﻟﺔ ﺑاﺳﺗﺧدام، 𝒬 = 𝐴𝑣 = 𝐴 𝑑𝑥0 𝑑𝑡 = 𝐴𝐷𝑥 𝑜 = 0.003𝐷𝑥 𝑜 → (2) المعادلتين بمساواة( 𝟐)و ( 𝟏): 0.01 3 (2xi − xo) = 0.003𝐷𝑥 𝑜 0.02 3 xi − 0.01 3 xo = 0.003𝐷𝑥 𝑜 0.02 3 xi = ( 0.01 3 + 0.003D) 𝑥0 ∴ 𝑇. 0 = 𝑋0 𝑋𝑖 = 0.02 3 0.01 3 + 0.003𝐷 والمقام البسط بقسمة 𝟎.𝟎𝟏 𝟑 ÷: 𝑥0 xi = 2 1 + 0.9D اﻟﺻورة ﺑﻧفس اﻟﻌالﻗﺔ وھذه K 1+𝜏𝐷 ﺣيث:𝐾 = 2،اﻟزمن وﺛاﺑت𝜏 = 0.9S اﻟذاﺗﻲ اﻟﻘﺻور إھمال ھﻲ اﻟمﻧاﺳﺑﺔ اﻻﻓﺗراضياتاﻟمﺗﺣرﻛﺔ ﻟألﺟزاء،ﺗﺳرب إھمال وﻛذﻟك .اﻟزيت واﻧضغاطيﺔ ﻋﻧد ]بxi = 20𝑚𝑚
- 100. 𝑥0 xi = k 1 + τD x0 = 𝐾𝑥𝑖 1 + τD = 2 × 20 1 + 0.9D اﻟﻌامﺔ ﻟﻠﺻيغﺔ ﺑاﻟرﺟوعاﻟﺧطوة ﻟداﻟﺔ: x0 = 𝑘𝑥𝑖 (1 − 𝑒 −𝑡 𝜏⁄ ) ∴ 𝑥0 = 40 (1 − 𝑒 −𝑡 0.9⁄ ) ﺑاﻟﺻفر ومﺳاواﺗﮭا اﻟﺧطوة داﻟﺔ ﺗفاضل يﺟب اﻟﻧﮭائيﺔ أو اﻟﺣديﺔ اﻹزاﺣﺔ ﻹيﺟاد، d𝑥0 dt = 0 − ( −1 0.9 × 𝑒 −𝑡 0.9⁄ ) = 0 = 40 0.9 𝑒 −t 0.9⁄ = 0 𝑒 −t 0.9⁄ = 0 ∴ 𝑡 = ∞ ∴ x0 = 40(1 − e−∞) = 40(1 − 0) = 40𝑚𝑚 ھﻲ اﻟﺣديﺔ اﻹزاﺣﺔ𝑡 = ∞ ﻋﻧد 40 𝑚𝑚. ﻋﻧدx0 = 0.85 × 40𝑚𝑚، 40 (1 − e −t 0.9⁄ ) = 40 × 0.85 1 − e −t 0.9⁄ = 0.85 e −t 0.9⁄ = 0.15 𝐿𝑛 𝑒 −𝑡 0.9⁄ = 𝐿𝑛0.15 −t 0.9 𝐿𝑛𝑒 = 𝐿𝑛0.15 ∴ 𝑡 = 𝐿𝑛0.15 𝐿𝑛𝑒 × −0.9 = −1.89712 1 × −0.9 = 1.71 𝑠 3يوضح ]اﻟمضغوط ﺑاﻟﮭواء ﺗﻌمل مؤازرة آﻟيﺔ أدﻧاه اﻟﺷﻛل،اﻟﮭواء ﺳريان ﻓﻲ اﻟﺗﺣﻛم يﺗم ﺣيث ( ﻗالﺑﻲ ﺻمام ﺑواﺳطﺔ األﺳطواﻧﺔ داﺧل إﻟﻰFlapper valveذراع يﺣرﻛه ).اﻟﺻمام ﺣرﻛﺔ،𝑦 اﻟوﺻﻠﺔ ﺣرﻛﺔ ﻧﺻف ﺗﺳاوي𝑥،ﺗﻌادل اﻟمﻛﺑس ومﺳاﺣﺔ. 1600 𝑚𝑚2 ايﺟاد يمﻛنﺳريان مﻌدل اﻟﻌالﻗﺔ من األﺳطواﻧﺔ داﺧل إﻟﻰ اﻟﮭواء𝑄 = 0.01𝑦 𝑚3 /𝑠،ﺣيث𝑦ﺑاﻟمﺗر. اآلﻟيﺔ ﻟﻠﺗرﻛيﺑﺔ اﻻﻧﺗﻘال داﻟﺔ اﺳﺗﻧﺑط ]أ،ﺛاﺑت إيﺟاد مﻊاﻟزمن،ﻋمود مﻘطﻊ مﺳاﺣﺔ ﺑإھمال وذﻟك .اﻟمﻛﺑس ﺟيﺑيﺔ اﻟدﺧل إﺷارة ﻛاﻧت إذا ]ب،ﺑاﻟﻌالﻗﺔ ﻋﻧﮭا رُِّﻌﺑيو𝜃𝑖 = 30 𝑠𝑖𝑛 2𝑡 𝑚𝑚طﺔَّﻠمﺳ وھﻲ اﻟذراع ﻋﻠﻰ،.ﻟﻠمﻛﺑس اﻟمﺳﺗﻘرة اﻟﺣرﻛﺔ ﻹيﺟاد اﺳﺗﺧدامﮭا يمﻛن اﻟﺗﻲ اﻟﻌالﻗﺔ ﻓاﺳﺗﻧﺑط
- 101. :اﻟﺣل :ﻟﻠوﺻﻠﺔ اﻟﮭﻧدﺳﻲ اﻟﺷﻛل من ][أ اﻟوﺻﻠﺔ إزاﺣﺔ مﺣﺻﻠﺔ ، 𝑥 = 60 100 × 𝜃𝑖 − 40 100 × 𝜃 𝑜 = 3𝜃 𝑖−2𝜃 𝑜 5 𝑚 ∴ 𝑦 = 𝑥 2 = 3𝜃𝑖 − 2𝜃0 10 𝑚 ∴ 𝒬 = 0.01 ( 3𝜃𝑖 − 2𝜃 𝑜 10 ) 𝑚3 /𝑠 → (1) السريان استمرارية معالة باستخدام، 𝓠 = 𝐀𝐯 = 𝐀 𝐝𝛉 𝐨 𝐝𝐭 = 𝟏𝟔𝟎𝟎 × 𝟏𝟎−𝟔 𝐝𝛉 𝐨 𝐝𝐭 → ( 𝟐) ( المعادلتين بمساواة1( و )2علﻰ نحصل ): 0.01 ( 3𝜃𝑖 − 2𝜃 𝑜 10 ) = 0.0016𝐷𝜃 𝑜 3θi − 2θo = 1.6𝐷𝜃 𝑜أو مﻧﮭا اﻟﺗﻲ،𝑇. 0 = 𝜃 𝑜 𝜃 𝑖 = 3 2+1.6𝐷 = 1.5 1+0.8𝐷 الزمن ثابت َّفإن بالتالي𝛕: 𝜏 = 0.8 𝑆 ﻛان إذا ][بθi = 30 sin 𝑝𝑡،َّﻓإن: 𝜃 𝑜 = 30 𝑠𝑖𝑛 𝑝𝑡 × 1.5 1 + 0.8𝐷 ﺑاﻟﺷﻛل اﻻﻧﺗﻘال ﻋامل يﻛون𝑘/(1 + 𝜏𝐷)ﺣيث𝑘 = 1.5اﻟمﻌادﻟﺔ من وﺑاﻟﺗاﻟﻲ: 𝜃 𝑜 = 𝑎𝑘 √(1 + 𝑝2 𝜏2) 𝑠𝑖𝑛( 𝑝𝑡−∝) ﺣيث∝= 𝑡𝑎𝑛−1 𝑝𝜏 𝑖. e. θo = 30 × 1.5 √1 + (2 × 0.8)2 sin[2t − tan−1(2 × 0.8)] = 23.85 sin(2𝑡 − 58°)
- 102. ﺑمطال ﺟيﺑيﺔ ﺣرﻛﺔ ﻟه اﻟﻛﺑاس ﻓإن ھﻛذا23.85𝑚𝑚مﻘدارھا ﺑزاويﺔ اﻟدﺧل ﻋن ًامﺗأﺧر58°. 4ﻟﺳفيﻧﺔ ﻗيادة ﺗروس مﻧظومﺔ ]اﺳطواﻧﺔ إﻟﻰ ﺑاﻟدﺧول ﻟﻠزيت يﺳمح ﺣيث ًاھايدروﻟيﻛي ﺗﻌمل اﻟﺳفيﻧﺔ ﻗيادة ﺑﻌﺟﻠﺔ يﻌمل امَّمﺻ ﺧالل اﻟﺗﺷغيل.( اﻟﺳفيﻧﺔ دﻓﺔ إﻟﻰ اﻟواﺻل اﻟﻌزم يﺗﻧاﺳبRudder) ويﺳاوي اﻟﺻمام ﻋمود ﺣرﻛﺔ مﻊ1𝐾𝑁. 𝑚مﻘدارھا ﻟﺣرﻛﺔ1𝑚𝑚من اﻟﻧاﺷئ اﻟمﻘاومﺔ ﻋزم . يﺳاوي اﻟدﻓﺔ إﻟﻰ اﻟماء6.5𝐾𝑁. 𝑚مﻘدارھا ﺑﺳرﻋﺔ1𝑟𝑎𝑑/𝑠. اﻟﻘيادة ﺑﻌﺟﻠﺔ يﺗﺻل اﻟﺻمام أن إﻟﻰ ﺑاﻹضاﻓﺔﺣرﻛﺗه ﺗﻛون ﺑﺣيث ﺑاﻟدﻓﺔ أيضا يﺗﺻل( ﺑاﻟـmm) ﺑاﻟمﻌادﻟﺔ ﺗﻌطﻲ(6.25∅ − 15θ)ﺣيث𝜃و ∅ﺑاﻟـ اﻟﺗرﺗيب ﻋﻠﻰ واﻟدﻓﺔ اﻟﻌﺟﻠﺔ زاويﺗﻲ ھما ( 𝑟𝑎𝑑). ﻟﺣظيﺔ ازاﺣﺔ اﻟﻌﺟﻠﺔ ﺗﻌطﻰ )اﻟﺳﻛون (ﺣاﻟﺔ اﻟدﻓﺔ ﺗﻧﺣرف ﻻ ﻋﻧدما ما ﻟﺣظﺔ ﻓﻲمﻘدارھا90° وضﻊ ﻓﻲ وﺗﻛوناﻻﻧﺣراف. اﻟﺗﻲ اﻟزاويﺔ ھﻲ ماﻓيﮭا ﺗدوراﻟدﻓﺔھو وماﻟﺗدور اﻟالزم اﻟزمنﺧالل اﻟدﻓﺔھذه أﻋﺷار ﺗﺳﻊ ؟ اﻟزاويﺔ اﻟﺣل: إزاﺣﺔاﻟﺻمام ﻋمود∝اﻟﺳفيﻧﺔ دﻓﺔ اﻟﻲ اﻟواﺻل اﻟﻌزم( 𝑇) 𝑇 = 1𝐾𝑁. 𝑚 = 1 × 103 𝑁. 𝑚 اﻻزاﺣﺔ = 1𝑚𝑚 ،𝑇/𝑚𝑚 = 1 × 103 𝑁. 𝑚 :الدفة إلﻰ الماء من الناشئ المقاومة عزم TR = 6.5𝐾𝑁. 𝑚 = 6.5 × 103 𝑁. 𝑚 ω = 1𝑟𝑎𝑑/𝑠 ∴ 𝐶 = 𝑇 𝜔 = 6.5 × 103 1 = 6.5 × 103 𝑁. 𝑚/( 𝑟𝑎𝑑 𝑆⁄ ) إﻟﻰ ﺑاﻹضاﻓﺔ اﻟﺻمامﺑاﻟدﻓﺔ ًاأيض يﺗﺻل اﻟﻘيادة ﺑﻌﺟﻠﺔ يﺗﺻل اﻧه = (6.25∅ − 15θ) 𝑚𝑚اﻹزاﺣﺔ ﺣيث≡ ∅اﻟﻘيادة ﻋﺟﻠﺔ إزاﺣﺔ ≡ θاﻟدﻓﺔ إزاﺣﺔ ( ﺧطوة دﺧل ھو األﺳﻰ اﻟﺗأﺧر ﻋامل ﻧوعStep input) اﻟﺳﻛون (ﺣاﻟﺔ،)اﻻﻧﺣراف ﻋدمθ = 0 ∅ = 90° = 90 × π 180 = π 2 𝑟𝑎𝑑 θ =? 𝑡 𝑎𝑡 0.9𝜃 =?
- 103. معادلة:الحركة (6.25∅ − 15θ) × 103 − 6.5 × 103 𝐷𝜃 = 𝐼𝐷2 𝜃 (6.25∅ − 15θ) × 103 − 6.5 × 103 𝐷𝜃 = 0 6.5𝐷𝜃 + 15𝜃 = 6.25∅ θ[6.5D + 15] = 6.25∅ 𝜃 ∅ = 6.25 15 + 6.5D الخطوة لدخل االستجابة: 15θ + 6.5Dθ = 6.25∅ ∅ = 𝜋 2 ( المستقرة الحالةP.I): θ = 𝐾 = ∅ 𝐷𝜃 = 0 15𝑘 + 0 = 6.25 × 𝜋 2 ∴ 𝑘 = 6.25𝜋 2 × 1 15 = 0.208𝜋 ∴ θ = 𝑘 = 0.208𝜋 ( المستقرة غير الحالةC.F): θ = 𝑅𝑒 𝑠𝑡 𝐷𝜃 = 𝑠𝑅𝑒 𝑠𝑡 15𝑅𝑒 𝑠𝑡 + 6.5𝑆𝑅𝑒 𝑠𝑡 = 0 𝑅𝑒 𝑠𝑡[15 + 6.5𝑆] = 0 𝑠 = − 15 6.5 = −2.31
- 104. θ = 𝑃. 𝐼 + 𝐶. 𝐹،اﻟﻛامل اﻟﺣل θ = 0.208𝜋 + 𝑅𝑒−2.31𝑡 " الحدودية الشروطBoundary conditions": ﻋﻧد𝜃 𝑜 = 0 و 𝑡 = 0 0 = 0.208𝜋 + 𝑅 𝑅 = −0.208𝜋 :الكامل الحل θ = 0.208𝜋 − 0.208𝜋𝑒−2.31𝑡 θ = 0.208𝜋(1 − 𝑒−2.31𝑡) ﻋﻧد𝑡 = ∞، θ = 0.208𝜋(1 − 0) = 0.208𝜋 0.9 × 0.208𝜋 = 0.208𝜋(1 − 𝑒−2.31𝑡) 0.9 = 1 − 𝑒−2.31𝑡 e−2.31t = 0.1 الطرفين علﻰ الطبيعي اللوغاريثم بأخذ: 𝐿𝑛e−2.31t = 𝐿𝑛0.1 ∴ −2.31𝑡 𝐿𝑛𝑒 = 𝐿𝑛0.1 ∴ 𝑡 = 𝐿𝑛0.1 𝐿𝑛𝑒 × − 1 2.31 = 0.997𝑠 2.3اﻻﺳﻲ رُّﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ مﺳائل: 1مﻘداره زمن ﺑﺛاﺑت ﺛيرموميﺗر ]6𝑠ﺣرارة درﺟﺔ ﻋﻧد أﺧذه يﺗمﺑمﻘدار ﻏرﻓﺔ15𝐶°ويغمر ﻋﻧد ﺳائل ﻓﻲ60 C°،ﺑﻌد اﻟﺛيرموميﺗر ﺳيﻘرأ ماذا5𝑠. 𝑨𝒏𝒔. ( 𝟒𝟎. 𝟓𝑪°) 2ﻏرﻓﺔ ﺣرارة درﺟﺔ ﻋﻧد ﺛيرموميﺗر ]15℃اﻟﺣرارة درﺟﺔ ﻓﻲ مفاﺟﻲء ﻻرﺗفاع ﺗﻌريضه يﺗم، مﻘدارھا ﻗراءة أوضح ﺣيث55C°ﺧالل3.55وﺑﻌد3.5𝑠إضاﻓيﺔ،اﻟﻘراءة أﺻﺑﺣت75𝐶°.أوﺟد اﻟﺣرارة درﺟﺔ ﻓﻲ اﻟمطﺑق واﻻرﺗفاع ﻟﻠﺛيرموميﺗر اﻟزمن ﺛاﺑت. 𝑨𝒏𝒔( 𝟓. 𝟎𝟒𝒔 ، 𝟗𝟎. 𝟗𝑪°) 3اﻟﺣراريﺔ موﺻﻠيﺗه ﻏاز ﺛيرموميﺗر ]0.02𝑊/𝐶°اﻟﺣراريﺔ وﺳﻌﺗه0.1𝐽/𝐶°. ﻟﻠﺛيرموميﺗر اﻟزمن ﺛاﺑت ﺣدد ]أ. اﻟﺣرارة درﺟﺔ ﻋﻧد اﻟﺛيرموميﺗر ﻛان إذا ]ب20𝐶°.ﺑﻌد اﻟﻘراءة أﺣﺳب10𝑠ﺳائل ﻓﻲ ﻏمره من ﺣرارﺗه درﺟه80℃. 4ﻏاليﺔ ﻓﻲ اﻟﺣرارة ﺳريان يﻛون ]1.5( 𝜃𝑖 − 𝜃 𝑜) 𝑘𝑤ﺣيث𝜃𝑖اﻟمﺗﺣﻛم ضﺑط ھو (controller settingو )𝜃 𝑜اﻟغاليﺔ ﺣرارة درﺟﺔ ھﻲ.ﻟﻠغاليﺔ اﻟﺣراريﺔ اﻟﺳﻌﺔﻟـ مﺳاويﺔ ﺗﻛون 150 𝑘𝑗/𝐶°.
- 105. .ﻟﻠغاليﺔ اﻟزمن وﺛاﺑت اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل ﻋﻠﻰ لَّﺻﺗﺣ ]أ ﻋﻧد ﺑاﺳﺗﻘرار ﺗﺷﺗغل اﻟغاليﺔ ﻛاﻧت إذا ]ب100𝐶°إﻟﻰ ﻓﺟأة اﻟمﺗﺣﻛم ضﺑط إﻋادة وﺗمت200𝐶°، إﻟﻰ ﻟﺗﺻل اﻟغاليﺔ ﺣرارة درﺟﺔ ﺳﺗﺳﺗغرﻗه اﻟذي اﻟزمن ھو ما100℃. 𝑨𝒏𝒔( 𝟏( 𝟏 + 𝟏𝟎𝟎𝑫)، 𝟏𝟎𝟎𝒔، 𝟔𝟗. 𝟑𝒔) 5أدﻧاه اﻟﺷﻛل من ]،اﻟدﺧل ﺗﺣريك َّمﺗ إذا𝑥iﺑﺳرﻋﺔ اﻹﺗزاﻧﻲ وضﻌه من ﺑاﺳﺗﻘرار5𝑚𝑚/𝑠، :أوجد ﺑﻌد اﻟﻛﺑاس ﺣرﻛﺔ ]أ4𝑠.اﻟﺗﺷغيل ﺑدايﺔ من ﻛان إذا ]جﺣرارة درﺟﺔ ﻋﻧد اﻟﺛيرموميﺗر20℃ﺑﻌد اﻟﻘراءة ﻓأﺣﺳب10𝑠اﻟﺳائل ﺗﺳﺧين من ﺑمﻌدل ﺑه اﻟمﺣيط2°𝑐/𝑠مﻘدارھا ﺣرارة درﺟﺔ من ًاﺑدء20°𝑐. 𝑨𝒏𝒔( 𝟓𝒔، 𝟕𝟏. 𝟗℃، 𝟑𝟏. 𝟑𝟓℃) مﺳاﻓﺔ ﻟيﺗﺣرك ﻟﻠﻛﺑاس اﻟمأﺧوذ اﻟزمن ]ب20𝑚𝑚. 𝑨𝒏𝒔( 𝟑𝟏. 𝟏𝒎𝒎، 𝟐. 𝟖𝟔𝟑𝒔) 6اﻟدﺧل إﻋطاء َّمﺗ إذا ،اﻟﺳاﺑﻘﺔ اﻟمﺳأﻟﺔ ﻓﻲ ﻟﻠﺷﻛل ﺑاﻟرﺟوع ]𝑥𝑖ﺑمطال ﺟيﺑيﺔ ﺣرﻛﺔ20 𝑚𝑚 وﺗردد1𝐻𝑍،اﻟﻛﺑاس ﻟﺣرﻛﺔ اﻟمﺳﺗﻘرة اﻟﺳﻌﺔ أوﺟد،.اﻟﺗأﺧر وزاويﺔ 𝑨𝒏𝒔( 𝟔. 𝟗𝟕𝒎𝒎، 𝟖𝟎℃) 7مﻘدارھا ﺳطح ﺑمﺳاﺣﺔ ﺻغيرة ﺑﺣيرة ]104 m2 إﻟﻰ اﻟﺳريان ﻗياس ويﺗم ﺑﺟدول ﺗغذيﺗﮭا يﺗم ﺑواﺳطﺔ اﻟﺧارجھدار( 𝑤𝑒𝑖𝑟)ﺑـ اﻟﺳريان مﻌدل إﻋطاء يﺗم𝒬 = 5ℎ 3 2⁄ 𝑚3 /𝑠ﺣيثℎھو اﻟماء ﺳمتﺑاألمﺗار اﻟﮭدار ﻓوق. اﻟدﺧﻠﻲ واﻟﺳريان اﻟﺧرﺟﻲ اﻟﺳريان ﺑين ﻋالﻗﺔ ﻋﻠﻰ ﺗﺣﺻل ]أﻓﻲ ﺻغيرة ﻟﺗفاوﺗاتℎ. و مﺳﺗﻘرة األﺣوال ﺗﻛون ﻋﻧدما ]بℎﻟـ مﺳاويﺔ0.1𝑚،اﻟﺳريان زيادة ﻓﻲ ﺗﺗﺳﺑب ﻋاﺻفﺔ ھﻧاﻟك ﺑمﻘدار ﺑاضطراد اﻟدﺧﻠﻲ10−4 𝑚3 /𝑠:اﻟﮭدار ﻓوق اﻟﺳريان مﻌدل أوﺟد .ﺛاﻧيﺔ ﻛل
- 106. 1.اﻟمﺳﺗﻘرة األﺣوال ﺗﺣت ] 2ﺑﻌد ]20اﻟﻌاﺻفﺔ ﺑدايﺔ من دﻗيﻘﺔ. 𝑨𝒏𝒔 ∙ ( 𝓠 𝟎 𝓠𝒊 = 𝟏 𝟏 + ( 𝟒𝟎𝟎𝟎 𝟑√𝒉 ) 𝑫 ، 𝟎. 𝟏𝟓𝟖𝒎 𝟑 /𝒔 ، 𝟎. 𝟏𝟕𝟑𝟕𝒎 𝟑 /𝒔) 8داﺧل إﻟﻰ اﻟزيت يﺗدﻓق ﺣيث ھايدروﻟيﻛﻲ مرﺣل ﺑواﺳطﺔ ﺗﺷغيﻠﮭا يﺗم ﺑاﺧرة ﺗوﺟيه دﻓﺔ ] إزاﺣﺗﮭا ﻓﻲ يﺗﺣﻛم ﺻمام ﻋﺑر اﻟمرﺣل اﺳطواﻧﺔاﻹﻏالق موضﻊ مناﻟﻘيادة ﻋﺟﻠﺔ ﺑواﺳطﺔ. اﻟﺻمام إزاﺣﺔ مﻊ ًاطرد يﺗﻧاﺳب اﻟدﻓﺔ ﻋﻠﻰ اﻟمﺳﻠط اﻟﻌزميﻌادل ﺑما1𝑚𝑚 ﻟﻛل 105𝑁. 𝑚 إزاﺣﺔ،ويﺳاوي دوراﻧﮭا ﺳرﻋﺔ مﻊ ًاطرد يﺗﻧاﺳب اﻟدﻓﺔ ﻟدوران اﻟماء ومﻘاومﺔ675 𝑁. 𝑚( 𝑟𝑎𝑑/ 𝑠). وإزاﺣﺗه اﻟﻘيادة ﺑﻌﺟﻠﺔ اﺗﺻاﻟه ﺟاﻧب إﻟﻰ ﺑاﻟدﻓﺔ مﺗﺻل اﻟﺻمام(6.25𝜃𝑖 − 15𝜃0)mmﺣيث θ 𝑂 و θi.اﻟﺗواﻟﻲ ﻋﻠﻰ واﻟدﻓﺔ اﻟﻘيادة ﻋﺟﻠﺔ ﻹزاﺣﺔ يرمزان ﺑمﻘدار ﻓﺟأة اﻟﻘيادة ﻋﺟﻠﺔ ازاﺣﺔ مَّﺗ إذا90°اﻻزاﺣﺔ ﻟﺑﻠوغ واﻟزمن اﻻﺳﺗﻘراريﺔ اﻟدﻓﺔ ازاﺣﺔ أوﺟد اﻻﺳﺗﻘراريﺔ اﻻزاﺣﺔ أﻋﺷار ﺗﺳﻊ. 𝑨𝒏𝒔( 𝟎. 𝟐𝟎𝟖𝟑𝝅 𝒓𝒂𝒅 ، 𝟎. 𝟗𝟖𝟖𝒔) 9ﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔ ﺗدار ﺣداﻓﺔ ]،دﺧل ﺑوﺗﻧﺷيوميﺗر ضﺑط ﺑواﺳطﺔ ﺳرﻋﺗﮭا ﻓﻲ اﻟﺗﺣﻛم يﺗم اﻟﺣﻠﻘﺔ مغﻠق ﺳرﻋﺔ ﺗﺣﻛم ﻧظام ﺑاﺳﺗﺧدام،اﻟﻘﺻور ﻋزميﻛون واﻟمﺣرك ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ 100𝑘𝑔𝑚2 ،مﻘداره ﺳرﻋﺔ وﺧطأ1 𝑟𝑎𝑑 𝑠−1 مﻘداره اﻟﺣداﻓﺔ ﻋﻠﻰ ًاﻋزم يﻧﺗج.45𝑁. 𝑚اﻟﻌزم اﻻﺣﺗﻛاﻛﻲيﻛون5𝑁. 𝑚اﻟﺣداﻓﺔ ﺳرﻋﺔ ﺗﻛون ﻋﻧدما1𝑟𝑎𝑑 𝑠−1 . اﻟﺳﻛون ﻋﻧد ﺑاﻟﻧظام،اﻟدﺧﻠﻲ اﻟﺑوﺗﻧﺷيوميﺗر ضﺑط َّﻓإنﻓﺟأة يزدادإﻟﻰ ﺻفر من50𝑟𝑒𝑣/𝑚𝑖𝑛. .ﻟﻠﺣداﻓﺔ اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺳرﻋﺔ ﺧطأ أﺣﺳب ،واﻟزمن اﻟمﺗﻌاﻗﺑﺔ اﻟﺣداﻓﺔ ﺳرﻋﺔ ﺑين اﻟﻌالﻗﺔ َّاﺷﺗق 𝑨𝒏𝒔(𝝎 𝒐( 𝒕) = 𝟏. 𝟓𝝅(𝟏 − 𝒆−𝟎.𝟓𝒕 )𝒓𝒂𝒅𝒔−𝟏 ، 𝟓𝒓𝒆𝒗/𝒎𝒊𝒏) 10ﻗطره وﻋاء من ﻟﺳائل اﻟﺧرﺟﻲ اﻟﺳريان ]0.5𝑚اﻟوﻋاء ﻓﻲ اﻟماء ﻋﻠو مﻊ ًامﺗﻧاﺳﺑ يﻛون، إﻟﻰ اﻟدﺧﻠﻲ اﻟﺳريان ﺑﺗﻧظيم يﻘوم اﻟﺳائل ﺑمﻧﺳوب ﺗﺷغيﻠه يﺗم ﻛروي ﺻمام ھﻧاﻟك0.125𝑥𝑚3 𝑠−1 ﺣيث ,𝑥مﻘدارھا مرﻏوﺑﺔ ﻗيمﺔ أﺳفل اﻟمﻧﺳوب ھﺑوط ھو1.5𝑚اﻹيﻘاف ﺻمام ﻓﺗح ﺗم إذا .ﻓﻲ اﻟﺧ اﻟﺳريان أن ﺑﺣيث ﻓﺟأة اﻟﺧرﺟﻲ اﻟﺳريان ماﺳورةإﻟﻰ ﺻفر من يﺗغير رﺟﻲ0.01ℎ𝑚3 𝑠−1 ، ﺣيثℎاﻟفﻌﻠﻲ اﻟمﻧﺳوب ھوﻟﻠوﻋاء،:ِّدﺣد .اﻟﺧزان ﻓﻲ اﻟﺳائل ﻟمﻧﺳوب اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﻗيمﺔ ]أ اﻟﺧزان ﻓﻲ اﻟمﻧﺳوب يﮭﺑط ﻟﻛﻲ اﻟمأﺧوذ اﻟزمن ]ب8𝐶𝑚. اﻟﺧرﺟﻲ واﻟﺳريان اﻟدﺧﻠﻲ ﻟﻠﺳريان اﻟﻠﺣظيﺔ اﻟﻘيم ]ج،ﺑـ اﻟﺻمام ﻓﺗح ﺑﻌد𝑡.ﺛاﻧيﺔ 𝑨𝒏𝒔 (𝟏. 𝟑𝟖𝟖𝒎، 𝟏. 𝟖𝟒𝟓𝒔 ، 𝟎. 𝟎𝟏𝟑𝟗(𝟏 − 𝒆−𝟎.𝟔𝟖𝟕𝟓𝒕 )، 𝟎. 𝟎𝟏𝟑𝟗(𝟏 + 𝟎. 𝟎𝟕𝟗𝒆−𝟎.𝟔𝟖𝟕𝟓𝒕 )) 2.4اﻟمرﻛب رُّﺧاﻟﺗأ داﻟﺔ أو ﻋامل ذات اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ:(Response of Complex Lag Elements)
- 107. 1.اﻟﺧطوة داﻟﺔ"Step Input": الخطوة لدالة اﻷولية الشروط: θi = 0, 𝑎𝑡 𝑡 < 0 θi = 𝑘 , 𝑎𝑡 𝑡 ≥ 0 θi = 𝑘 = 1( 𝑢𝑛𝑖𝑡 𝑠𝑡𝑒𝑝)(وﺣدة ذات )ﺧطوة هي مركب انتقال أو تحويل عامل ذو لنظام القياسية الصيغة: 𝑇. 0 = 𝜃 𝑜 𝜃𝑖 = 1 1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2 :عاليه للمعادلة ًاعكسي بالضرب 𝜃 𝑜 + 2𝜁𝜏𝐷𝜃 𝑜 + 𝜏2 𝐷2 𝜃 𝑜 = 𝜃𝑖 → (1) التﻔاضلية للمعادلة الكامل الحل:عاليه 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 المستقرة الحالة(P.I)"Steady State": 𝜃 𝑜 = θi = k = 1 العابرة الحالة أو الالمستقرة الحالة"Transient State( "C.F): 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 d𝜃 𝑜 dt = 𝐷𝜃 𝑜 = 𝑆𝑅𝑒 𝑠𝑡 d2 𝜃 𝑜 dt2 = 𝐷2 𝜃 𝑜 = 𝑆2 𝑅𝑒 𝑠𝑡 𝑅𝑒 𝑠𝑡 + 2𝜁𝜏𝑆𝑅𝑒 𝑠𝑡 + 𝜏2 𝑆2 𝑅𝑒 𝑠𝑡 = 0 𝑅𝑒 𝑠𝑡(1 + 2𝜁𝜏𝑆 + 𝜏2 𝑆2) = 0 τ2 S2 + 2𝜁𝜏𝑆 + 1 = 0 𝑆 = −𝑏 ± √𝑏2 − 4𝑎𝑐 2𝑎 ∴ 𝑆 = −2𝜁𝜏 ± √4𝜁2 𝜏2 − 4𝜏2 2𝜏2 = −2𝜁𝜏 ± √4𝜏2( 𝜁2 − 1) 2𝜏2 = −2𝜁𝜏 ± 2𝜏√𝜁2 − 1 2𝜏2 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 اﻷولﻰ الحالة: ﻋﻧدما𝜁 = 0)مﺧمد ﻏير أو ﺣر (ﺗردد 𝑆 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 ﻋن ﺑاﻟﺗﻌويض𝜁 = 0
- 108. ∴ 𝑆 = ± 1 𝜏 √−1 = ±𝑗 1 𝜏 ∴ 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 = 𝑅𝑒±𝑗 𝑡 𝜏 :َّأن معلوم ejθ = cos 𝜃 + j sin θ → (2) و e−jθ = cos 𝜃 − j sin θ → (3) ( المعادلتين بجمﻊ2( و )3علﻰ نتحصل ): cos 𝜃 = ejθ + e−jθ 2 ( المعادلة وبطرح3( المعادلة من )2علﻰ نحصل ): j sin θ = ejθ − e−jθ 2 ∴ 𝜃 𝑜 = 𝑅 cos( 𝜃 − Ψ) = 𝑅 cos ( 𝑡 𝜏 − Ψ) :اﻟﻛامل اﻟﺣل𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 ∴ 𝜃 𝑜 = 1 + 𝑅 cos ( 𝑡 𝜏 − Ψ) → (4) الحدودية الشروط بتطبيق: ﻋﻧد𝑡 = 𝑜و𝜃 𝑜 = 0( ﻟﻠمﻌادﻟﺔ4) 0 = 1 + 𝑅 cos(−Ψ) = 1 + 𝑅 cos Ψ 𝑅 cos Ψ = −1 ∴ 𝑅 = −1 cos Ψ ﻋﻧد𝑡 = 𝑜و𝐷𝜃 𝑜 = 0( ﻟﻠمﻌادﻟﺔ4) 𝐷𝜃 𝑜 = 0 + R [− 1 𝜏 sin ( 𝑡 𝜏 − Ψ)] = 0 − 𝑅 𝜏 sin(−Ψ) = 0 ∴ 𝑅 𝜏 sin Ψ = 0 ∴ sin Ψ = 0 وﺑاﻟﺗاﻟﻲ:Ψ = sin−1 0 = 0 ∴ 𝑅 = −1 cos Ψ = −1 cos 𝑜 = −1 1 = −1 ∴ 𝜃 𝑜 = 1 − cos 𝑡 𝜏 = 1 − cos 𝜔 𝑛 𝑡 َّأن ﺑما(𝜔 𝑛 = 1 𝜏 )
- 109. الثانية الحالة: ﻋﻧدما𝜁 < 1)اﻟمضاءﻟﺔ ﻧاﻗص (ﺗردد(Under - Damped Oscillatory) 𝑠 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 :التالية بالصورة كتابتها يمكن 𝑆 = −𝜁 𝜏 ± 𝑗 1 𝜏 √1 − 𝜁2 ( الالمستقرة الحالةC.F) 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 𝜃 𝑜 = 𝑅𝑒 (− 𝜁 𝜏 ±𝑗 1 𝜏 √1−𝜁2)𝑡 = R𝑒 −𝜁𝑡 𝜏 cos ( 𝑡 𝜏 √1 − 𝜁2 − Ψ) ،اﻟمﺧمد اﻟﺗردد𝜔 𝑑 = 𝜔 𝑛√1 − 𝜁2 = 1 𝜏 √1 − 𝜁2 ∴ 𝜃 𝑜 = 𝑅𝑒 −𝜁𝑡 𝜏 cos( 𝜔 𝑑 𝑡 − Ψ) اﻟﺣل اﻟﻛامل ، 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 𝜃 𝑜 = 1 + 𝑅𝑒 −𝜁𝑡 𝜏 cos( 𝜔 𝑑 𝑡 − Ψ) :الحدودية الشروط بتطبيق ﻋﻧد𝑡 = 0و𝜃 𝑜 = 0 كاآلتي عاليه المعادلة تصبح: 0 = 1 + 𝑅 cos(−Ψ) 0 = 1 + 𝑅 cos Ψ 𝑅 cos Ψ = −1 ∴ 𝑅 = −1 cos Ψ ﻋﻧد𝑡 = 𝑜و𝐷𝜃 𝑜 = 0
- 110. ∴ 𝐷𝜃 𝑜 = 0 + 𝑅 [𝑒 −𝜁𝑡 𝜏 × −𝜔 𝑑 sin( 𝜔 𝑑 𝑡 − Ψ) + cos( 𝜔 𝑑 𝑡 − Ψ) × −𝜁 𝜏 𝑒 −𝜁𝑡 𝜏 ] 0 = 𝑅 [−𝜔 𝑑 sin(−Ψ) − 𝜁 𝜏 cos(−Ψ)] 0 = 𝜔 𝑑 𝑠𝑖𝑛 𝛹 − 𝜁 𝜏 𝑐𝑜𝑠 𝛹 𝜔 𝑑 sin Ψ = 𝜁 𝜏 cos 𝛹 sin Ψ cos Ψ = tan Ψ = ζ τωd = ωnζ ωd = ωnζ ωn√1 − ζ2 = 𝜁 √1 − 𝜁2 𝑡𝑎𝑛 Ψ = 𝜁 √1 − 𝜁2 ∴ Ψ = sin−1 𝜁 √1 − 𝜁2 cos Ψ = √1 − 𝜁2 1 = √1 − 𝜁2 𝑅 = −1 cos Ψ = −1 √1 − 𝜁2 ﻟﻛن ∴ 𝜃 𝑜 = 1 − 1 √1 − 𝜁2 𝑒 −𝜁𝑡 𝜏 cos ( 𝑡 𝜏 √1 − 𝜁2 − tan−1 𝜁 √1 − 𝜁2 )
- 111. ( اﻹﺧماد ﻧاﻗص ﺗرددUnder- Damped Oscillatory) :اﻟﺛاﻟﺛﺔ اﻟﺣاﻟﺔ عندما𝜻 = 𝟏(اإلخماد حرج تردد)(Critically Damped Frequency) 𝑠 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 𝑆 = −1 𝜏 الالمستقرة الحالة(C.F): 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 = 𝑅𝑒 −𝑡 𝜏 :الكامل الحل𝜃 𝑜 = 1 + 𝑅𝑒 −𝑡 𝜏 الحدودية الشروط: 𝜃 𝑜 = 0 و 𝑡 = 0 𝜃 𝑜 = 1 + 𝑅𝑒 −𝑡 𝜏 0 = 1 + 𝑅 ∴ 𝑅 = −1 ∴ 𝜃 𝑜 = 1 − 𝑒 −𝑡 𝜏 = 1 − 𝑒 𝜔 𝑛 𝑡
- 112. مﺗأرﺟح ﻏير اﻟمضاءﻟﺔ ﺣرج اھﺗزاز Critically Damped Vibration (Non-Oscillatory) :اﻟراﺑﻌﺔ اﻟﺣاﻟﺔ ﻋﻧدما𝜁 > 1)المضاءلة زائد (تردد(over –damped frequency) 𝑆 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 ( المستقرة غير الحالةC.F:) 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 = 𝑅𝑒 ( −𝜁 𝜏 ± 1 𝜏 √𝜁2−1)𝑡 الكامل الحل:𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 𝜃 𝑜 = 1 + 𝑅𝑒 ( −𝜁 𝜏 ± 1 𝜏 √𝜁2−1)𝑡 𝜃 𝑜 = 1 + 𝑅𝑒 −𝜁 𝜏 𝑡 [𝑒± 𝑡 𝜏 √𝜁2−1 ]
- 113. اﻟمضاءﻟﺔ زائد اھﺗزاز()مﺗأرﺟح ﻏير Over Damped Vibration (Non-Oscillatory) 2.5بَّﻛاﻟمر رُﺧأاﻟﺗ ﻋﻧاﺻر ﻓﻲ مﺣﻠوﻟﺔ أمﺛﻠﺔ: 1ﺣداﻓﺔ ].اﻟيدويﺔ اﻟﻌﺟﻠﺔ ﺣرﻛﺔ ﻟﺗﺗﺑﻊ ًاأوﺗوماﺗيﻛي ﻓيﮭا اﻟﺗﺣﻛم يﺗم ﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔ دارُﺗ ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزميﻛون150𝑘𝑔𝑚2 ﻋﻠيﮭا َّقﺑاﻟمط اﻟمﺣرك وﻋزميﻛون 2400𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑اﻟمﺣاذاة ﻋدم مناﻟيدويﺔ واﻟﻌﺟﻠﺔ اﻟﺣداﻓﺔ ﺑين.ًامﻛاﻓئ يﻛون اﻟﻠزج اﻻﺣﺗﻛاك مﻘداره ﻟﻌزم600𝑁. 𝑚 𝑟𝑎𝑑−1 𝑠اﻟﻌﺟﻠﺔ ﺗدوير َّمﺗ اذﺧالل ﻓﺟأة اﻟيدويﺔ60° اﻟﻧظام يﻛون ﻋﻧدما ﺳﻛون ﺣاﻟﺔ ﻓﻲ،.ﻟﻠزمن ﺑاﻟﻧﺳﺑﺔ ﻟﻠﺣداﻓﺔ اﻟزاوي ﻟﻠوضﻊ ًاﺗﻌﺑير ِّدﺣد :اﻟﺣل 𝐼 = 150 𝑘𝑔𝑚2 , 𝜆 = 2400 𝑁. 𝑚/𝑟𝑎𝑑،اﻟذاﺗ اﻟﻘﺻور ﻋزمﻲ 𝐶 = 600 𝑁. 𝑚𝑠/𝑟𝑎𝑑،اﻟﻠزج اﻻﺣﺗﻛاك مﻌامل 𝜃𝑖 = 60° = 60×𝜋 180 = 𝜋 3 𝑟𝑎𝑑،اﻟيدويﺔ اﻟﻌﺟﻠﺔ ازاﺣﺔ 𝜃 𝑜( 𝑡) =? الحركة معادلة:
- 114. λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝜃 𝑜 ° = 𝐼𝜃 𝑜 °° λ𝜃𝑖 − λ𝜃 𝑜 − CD𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 λ𝜃𝑖 = λ𝜃 𝑜 + CD𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑇. 0 = 𝜆 𝜆+𝐶𝐷+𝐼𝐷2 اﻻﻧﺗﻘال أو اﻟﺗﺣويل ﻋامل والمقام البسط بقسمة𝛌 ÷: 𝜃 𝑜 𝜃𝑖 = 1 1 + 𝐶 𝜆 𝐷 + 𝐼 𝜆 𝐷2 اﻟمرﻛب رُﺧﻟﻠﺗأ اﻟﻘياﺳيﺔ ﻟﻠﺻورة مﻧاظر ھو واﻟذي، 1 1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2 ∴ 2𝜁𝜏 = 𝐶 𝜆 ، 2𝜁𝜏 = 600 2400 = 0.25 → (1) 𝜏2 = 𝐼 𝜆 = 150 2400 ، ∴ 𝜏 = √ 150 2400 = 0.25 sec → (2)ًاوأيض، ﻗيمﺔ ﺑﺗﻌويضτ( اﻟمﻌادﻟﺔ من2( اﻟمﻌادﻟﺔ ﻓﻲ )1)، 2 × 0.25𝜁 = 0,25 ∴ 𝜁 = 0.25 0.5 = 0.5 ان ﺑما𝜁 < 1اﻟمضاءﻟﺔ ﻧاﻗص يﻛون )(اﻻھﺗزاز اﻟﺗردد ﻓإن 𝜃 𝑜 = 𝜃𝑖 (1 + 𝑅𝑒 −𝜁𝑡 𝜏 cos( 𝜔 𝑑 𝑡 − Ψ))،اﻟﺧطوة داﻟﺔ اﺳﺗﺟاﺑﺔ 𝜃 𝑜 = 𝜋 3 (1 − 1 √1 − 𝜁2 𝑒 −𝜁𝑡 𝜏 cos ( 𝑡 𝜏 √1 − 𝜁2 − tan−1 𝜁 √1 − 𝜁2 )) 𝜽 𝒐 = 𝝅 𝟑 (𝟏 − 𝟏 √𝟏 − 𝟎. 𝟓 𝟐 𝒆(−𝟎.𝟓/𝟎.𝟐𝟓)𝒕 𝐜𝐨𝐬 ( 𝒕 𝟎. 𝟐𝟓 √ 𝟏 − 𝟎. 𝟓 𝟐 − 𝐭𝐚𝐧−𝟏 𝟎. 𝟓 √𝟏 − 𝟎. 𝟓 𝟐 )) ∴ 𝜃 𝑜 = 𝜋 3 [1 − 1.155𝑒−2𝑡 cos(3.46𝑡 − 0.58)] 2مﻘداره ذاﺗﻲ ﻗﺻور ﻋزم ﻟديه اﻟﺧرج ﻋﻧد اﻟﺣمل أن ﻧﺟد اﻟﺑﻌد ﻋﻠﻰ من ﺗﺣﻛم ﺟﮭاز ﻓﻲ ] 0.2𝑘𝑔 𝐶𝑚2 يﺳاوي اﻟمضاءﻟﺔ ومﻌامل0.6اﻟﺣرج اﻟمضاءﻟﺔ مﻌامل من.ًاﻋزم اﻟمﺣرك يﻌطﻲ مﻘداره200𝜇𝑁. 𝑚/𝑟𝑎𝑑مضروﺑاﻟﺧطأ ﻓﻲ ًا.ﺷﻛل ﻓﻲ ﺗﺷويش إﻟﻰ اﻟﺧرج ﻋمود ﺗﻌرض إذا ﻋﻧد اﻟﺧرج ﻟﻌمود ﻟﻠمﺟاوزة اﻟﻘﺻوى اﻟمئويﺔ اﻟﻘيمﺔ أﺣﺳب .اﻻﺗزان موضﻊ من مفاﺟئﺔ إزاﺣﺔ .اﻟﻘﺻوى ﻗيمﺗه إﻟﻰ يﺻل ﻋﻧدما اﻟﺗﺷويش ھذا ﺑﻌد واﻟزمن اﻻﺗزان وضﻊ إﻟﻰ ﻟﻠرﺟوع مﺣاوﻟﺗه
- 115. :الحركة معادلة λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝜃 𝑜 0 = 𝐼𝜃 𝑜 00 λ𝜃𝑖 − λ𝜃 𝑜 − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 λ𝜃𝑖 = λ𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 = 𝜃 𝑜{ 𝜆 + 𝐶𝐷 + 𝐼𝐷2} 𝑇. 0 = 𝜃 𝑜 𝜃𝑖 = 𝜆 𝜆 + 𝐶𝐷 + 𝐼𝐷2 = 1 1 + 𝐶 𝜆 𝐷 + 𝐼 𝜆 𝐷2 = 1 1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2 مرﻛب ﺗأﺧر اﺳﺗﺟاﺑﺔ ھﻲ اﻟﻧظام ﻟﮭذا اﻻﺳﺗﺟاﺑﺔ. اﻟ وﻋامل ﺑاﻟمﺳأﻟﺔ اﻟمﻌطﻰ اﻟﺗﺣويل ﻋامل ﺑين ﺑاﻟﺗﻧاظرﻧﺣﺻل اﻟمرﻛب اﻟﺗأﺧر ﻟﻧظم اﻟﻘياﺳﻲ ﺗﺣويل ﻋﻠﻰ: 2𝜁𝜏 = 𝐶 𝜆 :المسألة معطيات من λ = 𝑐 𝑐 𝑐 , 𝐶 = 0.6𝐶𝑐 ∴ 𝜁 = 0.6 λ = 200 × 10−6 𝑁. 𝑚/𝑟𝑎𝑑 2 × 0.6𝜏 = 𝐶 200 × 10−6 → (1) 𝜏2 = 𝐼 𝜆 ∴ 𝜏 = √ 𝐼 𝜆 = √ 0.2 × 10−4 200 × 10−6 = 0.316𝑠𝑒𝑐/𝑟𝑎𝑑 ∴ 𝜔 𝑛 = 1 𝜏 = 1 0.316 = 3.165𝑟𝑎𝑑/𝑠
- 116. دالة الستجابة الكامل الحل:الخطوة 𝜃 𝑜 = 1 − 1 √1 − 𝜁2 𝑒 −𝜁 𝜏 𝑡 cos ( 𝑡 𝜏 √1 − 𝜁2 − tan−1 𝜁 √1 − 𝜁2 ) الصعود زمن(Rise time)( 𝐭 𝒓)إﻟﻰ األوﻟﻰ ﻟﻠمرة اﻻﺳﺗﺟاﺑﺔ ﻓيه ﺗﺻل اﻟذي اﻟزمن ھو : .اﻟمﺳﺗﻘرة اﻟﻧﮭائيﺔ ﻗيمﺗﮭا اﻷقصﻰ الزمن(Peak time)(𝒕 𝒑):.اﻟﻘﺻوى ﻗيمﺗﮭا إﻟﻰ اﻻﺳﺗﺟاﺑﺔ ﻓيه ﺗﺻل اﻟذي اﻟزمن ھو االستقرار أو الضبط زمن(Settling time)( 𝒕 𝒔):ﺗﺗأرﺟح ان ﻗﺑل اﻟمطﻠوب اﻟزمن ھو ( من َّلأﻗ اﻻﺳﺗﺟاﺑﺔ5% إﻟﻰ 2%.اﻟمﺳﺗﻘرة اﻟﻧﮭائيﺔ ﻗيمﺗﮭا من ) 𝑡 𝑝 = 𝜃 𝜔 𝑑 = 𝜋 𝜔 𝑑 = 𝜋 𝜔 𝑛√1−𝜁2 األﻗﺻﻰ اﻟزمن ∴ 𝑡 𝑝 = 𝜋 3.165√1 − 0.62 = 1.241 𝑠𝑒𝑐𝑜𝑛𝑑𝑠 𝜃 𝑜 = 1 − 1 √1 − 𝜁2 𝑒 −𝜁 𝜏 𝑡 cos ( 𝑡 𝜏 √1 − 𝜁2 tan−1 𝜁 √1 − 𝜁2 ) 𝜃 𝑜 = 1 − 1 √1 − 0.62 𝑒 −0.6 0.316 ×1.241 cos [( 1.241 0.316 √1 − 0.62 − tan−1 0.6 √1 − 0.62 × 𝜋 180 ) × 180 𝜋 ] ∴ 𝜃0 = 1 + 0.0948 = 1.0948 𝑟𝑎𝑑 = 1 − 0.0948 = 1.0948 𝑟𝑎𝑑،اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة 𝑃. 𝑜 = 0.0948 1 × 100% = 9.48%اﻟﻘﺻوى ﻟﻠمﺟاوزة اﻟمئويﺔ اﻟﻧﺳﺑﺔ القصوى المجاوزة حساب يمكن ًاأيضكاآلتي المئوية: 𝑃. 𝑂 = 100 𝑒−𝜁𝜋/√1−𝜁2
- 117. ∴ 𝑃. 𝑂 = 100 𝑒−0.6𝜋/√1−0.62 = 9.48% يلي كما حسابها يمكن أو: 𝑃. 𝑂 = 100 𝑒 −𝜁 𝜏 𝑡 = 100 𝑒 −0.6 0.316×1.241 = 9.48% 3مضاءﻟﺔ ﺑواﺳطﺔ ما ﺣد إﻟﻰ اﺳﺗﻘرارھا يﺗم ارة َّدو ﻛﺗﻠﺔ وضﻊ ﻓﻲ ﻟﻠﺗﺣﻛم مؤازرة مﻧظومﺔ ] ﺗﺳاوي ﻟزﺟﺔ اﺣﺗﻛاكاﻟمطﻠوﺑﺔ اﻟﺣرﺟﺔ اﻟمضاءﻟﺔ أرﺑاع ﺛالث.ﻗيمﺔ ﻛاﻧت إذااﻟﺣر اﻟطﺑيﻌﻲ اﻟﺗردد ھﻲ ﻟﻠمﻧظومﺔ )اﻟمﺧمد (ﻏير12 𝐻𝑍. ومﻧه اﻟﺳﻛون من ﺟديد وضﻊ إﻟﻰ ﻓﺟأة اﻟدﺧل مﺗﺣﻛم ﺗﺣريك َّمﺗ إذا اﻟمﻧظومﺔ ﻟﺧرج ًاﺗﻌﺑير اﺷﺗق اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة أوﺟد.ﻟالﺳﺗﺟاﺑﺔ :اﻟﺣل معطياتالمسألة: c = 0.75c 𝑐 ∴ 𝑐 𝑐 𝑐 𝜁 = 0.75 𝜔 𝑛 = 12𝐻𝑍 = 12𝑐𝑦𝑐𝑙𝑒𝑠 𝑠𝑒𝑐 = 12 × 2𝜋 = 75.4𝑟𝑎𝑑/𝑠 τ = 1 𝜔 𝑛 = 0.01326 𝑠𝑒𝑐 :الحركة معادلة λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝜃 𝑜 0 = I𝜃 𝑜 00 λ( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜 0 = ID𝜃 𝑜 00 λ𝜃𝑖 − λ𝜃 𝑜 − 𝐶𝐷 𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 = 𝜃 𝑜[ 𝜆 + 𝐶𝐷 + 𝐼𝐷2] 𝜃 𝑜 𝜃𝑖 = 𝜆 𝜆 + 𝐶𝐷 + 𝐼𝐷2 = 1 1 + 𝐶 𝜆 𝐷 + 𝐼 𝜆 𝐷2 مرﻛب ﺗأﺧر ﻟﻧظام اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ مﻧاظرة ﺗﻛون واﻟﺗﻲ 1 1+2𝜁𝜏𝐷+𝜏2 𝐷2
- 118. أن ﺑما𝜁 < 1( اﻟمضاءﻟﺔ ﻧاﻗص يﻛون اﻟﺗردد ﻓإنUnder damped.ﺧطوة ﻟداﻟﺔ ) :الخطوة دخل 𝜃𝑖 = 𝑘 ، 𝑎𝑡 𝑡 ≥ 0 𝜃𝑖 = 0 ، 𝑎𝑡 𝑡 < 0 خطوة لوحدة(Unit step)𝑘 = 1 ∴ 𝜃𝑖 = 𝑘 = 1 الحالةالمستقرة(P.I): 𝜃 𝑜 = 𝜃𝑖 = 𝑘 = 1 المستقرة غير الحالة(C.F): 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 𝐷𝜃 𝑜 = 𝑆𝑅 𝑒 𝑠𝑡 𝐷2 𝜃 𝑜 = 𝑆2 𝑅𝑒 𝑠𝑡 𝑅𝑒 𝑠𝑡 + 2𝜁𝜏𝑆𝑅𝑒 𝑠𝑡 + 𝜏2 𝑠2 𝑅𝑒 𝑠𝑡 = 0 𝑅𝑒 𝑠𝑡{1 + 2𝜁𝜏𝑆 + 𝜏2 𝑠2} = 0 ∴ 𝜏2 𝑆2 + 2𝜁𝜏𝑆 + 1 = 0 𝑆 = −𝑏 ± √𝑏2 − 4𝑎𝑐 2𝑎 = −2𝜁𝜏 ± √4𝜁2 𝜏2 − 4𝜏2 2𝑡2 −2𝜁𝜏 ± √4𝜏2 − ( 𝜁2 − 1) 2𝑡2 −2𝜁𝜏 ± 2𝜏√𝜁2 − 1 2𝑡2 ∴ 𝑆 = −𝜁 𝜏 ± 1 𝜏 √𝜁2 − 1 ﻋﻧدما𝜁 < 1 𝑠 = −𝜁 𝜏 ± 𝑗 1 𝜏 √1 − 𝜁2 𝜃 𝑜 = 𝑅𝑒 𝑠𝑡 = 𝑅𝑒 ( −𝜁 𝜏 ±𝑗 1 𝜏 √1−𝜁2)𝑡 𝜃 𝑜 = 𝑅𝑒 −𝜁 𝜏 𝑡 cos( 𝜔 𝑑 𝑡 − Ψ) :الكامل الحل 𝜃 𝑜 = 𝑃. 𝐼 + 𝐶. 𝐹 ∴ 𝜃 𝑜 = 1 + 𝑅𝑒 −𝜁 𝜏 𝑡 cos( 𝜔 𝑑 𝑡 − Ψ) األوﻟيﺔ اﻟﺷروط(Initial conditions): ﻋﻧد𝜃 𝑜 = 0 ، 𝑡 = 0
- 119. 0 = 1 + 𝑅 cos(−Ψ) 0 = 1 + 𝑅 cos Ψ ∴ R cos Ψ = −1 ∴ 𝑅 = −1 cos Ψ ﻋﻧد𝐷𝜃 𝑜 = 0 , 𝑡 = 0 𝐷𝜃 𝑜 = 0 + 𝑅𝑒 −𝜁 𝜏 𝑡 × −𝜔 𝑑 sin( 𝜔 𝑑 𝑡 − Ψ) + cos( 𝜔 𝑑 𝑡 − Ψ) × −𝜁 𝜏 𝑅𝑒 −𝜁 𝜏 𝑡 𝐷𝜃 𝑜 = −𝜔 𝑑 𝑅𝑒 −𝜁 𝜏 𝑡 sin( 𝜔 𝑑 𝑡 − Ψ) − 𝜁 𝜏 𝑒 −𝜁 𝜏 𝑡 cos( 𝜔 𝑑 𝑡 − Ψ) 0 = −𝜔 𝑑 𝑅 sin(−Ψ) − 𝜁 𝜏 𝑅 cos(−Ψ) 0 = 𝜔 𝑑 𝑅 sin Ψ − 𝜁 𝜏 𝑅 cos Ψ 𝜔 𝑑 𝑅 sin Ψ = 𝜁 𝜏 𝑅 cos Ψ sin Ψ cos Ψ = tan Ψ = 𝜁 𝜏𝜔 𝑑 = 𝜁 1 𝜔 𝑛 𝜔 𝑛√1 − 𝜁2 = 𝜁 √1 − 𝜁2 Ψ = tan−1 𝜁 √1 − 𝜁2 cos Ψ = √1 − 𝜁2 ∴ 𝑅 = −1 cos Ψ = −1 √1 − 𝜁2 :الكامل الحل𝜃 𝑜 = 1 − 1 √1−𝜁2 𝑒 −𝜁 𝜏 𝑡 cos ( 𝑡 𝜏 √1 − 𝜁2 − tan−1 𝜁 √1−𝜁2 ) 𝑡 𝑝 = 𝜃 𝜔 𝑑 = 𝜋 𝜔 𝑛√1−𝜁2 = 𝜋 75.4√1−0752 = 0.063𝑠،األﻗﺻﻰ اﻟزمن 𝜃 𝑜 = 100𝑒 −𝜁𝜋 √1−𝜁2⁄ ،اﻟﻘﺻوى اﻟمﺟاوزة = 100𝑒 −0.75𝜋 √1−0.752⁄ = 2.84%
- 120. 𝜽 𝟎 = 𝟏 − 𝟏 𝟏 − 𝟎. 𝟕𝟓 𝟐 𝒆 −𝟎.𝟕𝟓 𝟎.𝟎𝟏𝟑𝟐𝟔×𝟎.𝟎𝟔𝟑 𝐜𝐨𝐬 (( 𝟎. 𝟎𝟔𝟑 𝟎. 𝟎𝟏𝟑𝟐𝟔 √ 𝟏 − 𝟎. 𝟕𝟓 𝟐 − (𝐭𝐚𝐧−𝟏 𝟎. 𝟕𝟓 √𝟏 − 𝟎. 𝟕𝟓 ) × 𝝅 𝟏𝟖𝟎 ) × 𝟏𝟖𝟎 𝝅 ) 𝜃 𝑜 = 1 + 0.0284 = 1.0284 𝑟𝑎𝑑 = 1.0284 − 1 = 0.0284اﻟﻘﺻوى اﻟمﺟاوزة 𝑃. 𝑂 = 0.0284 × 100 − 2.84%اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة 4اﻟزاويﺔ اﻹزاﺣﺔ ﻓﻲ ﺗﺗﺣﻛم اﻟوضﻊ ﻓﻲ مٌّﻛﺗﺣ مﻧظومﺔ ]مﻊ ًاطرد يﺗﻧاﺳب ﻋزم ﺑﺗﺳﻠيط ﻟﻠﺣموﻟﺔ ﻟﻠﺣموﻟﺔ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم .)واﻟﺧرج اﻟدﺧل ﺑين اﻟفرق (أي اﻟﺧطأ340𝑘𝑔𝑚2 اﻟﺗﺧميد ومﻌامل يﺳاوي8000𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)يﻛون ﻋﻧدمااﻟدﺧل10𝑑𝑒𝑔/𝑠.يﺳاوي اﻟمﺳﺗﻘر اﻟﺧطأ0.25°، :أوﺟد اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘. اﻟﺗﺧميد ﻧﺳﺑﺔ ]ب. .اﻟمﺧمد اﻟطﺑيﻌﻲ اﻟﺗردد ]ج .مﺧمد اﻟغير اﻟطﺑيﻌﻲ اﻟﺗردد ]د اﻟﺣل: :الحركة معادلة 𝑘( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 − 𝑘𝜃 𝑜 − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 = 𝑘𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 = 𝜃 𝑜[ 𝑘 + 𝐶𝐷 + 𝐼𝐷2] 𝑇. 0 = 𝜃 𝑜 𝜃 𝑖 = 𝑘 𝑘+𝐶𝐷+𝐼𝐷2 اﻻﻧﺗﻘال او اﻟﺗﺣويل ﻋامل والمقام البسط بقسمة𝒌%علﻰ نحصل: 𝜃 𝑜 𝜃𝑖 = 1 1 + 𝐶 𝐾 𝐷 + 𝐼 𝐾 𝐷2
- 121. ﻟﻠﺻيغﺔ مﻧاظر ھو واﻟذياﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ 1 1+2ζτD+τ2D2 :المسألة معطيات 𝐶 = 8000𝑁. 𝑚 ( 𝑟𝑎𝑑 𝑠 ) , 𝐼 = 340𝑘𝑔𝑚2 اﻟﺗﺧميد مﻌامل ωi = 10° /s = 10° × π 180 = 0.1745rad/s ∈ss= 0.25° = 0.25 × 𝜋 180 = 0.00436𝑟𝑎𝑑،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ اﻧﺣدار ﻟدﺧل اﺳﺗﺟاﺑﺔ 𝜃𝑖 = ω𝑡 ( المستقرة الحالةP.I:) 𝐷𝜃 𝑜 = ω 𝐷2 𝜃0 = 0 𝜃 𝑜 + 2ζτ𝐷𝜃 𝑜 + 𝜏2 𝐷2 𝜃 𝑜 = 𝜃𝑖 ω𝑡 + 𝒬 + 2ζτω + 0 = ωt ∴ 𝒬 = −2ζτω 𝜃 𝑜 = ω𝑡 − 2ζτω،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ اﺳﺗﺟاﺑﺔ θ𝑖 = ω𝑡 ∈ss= θi − θo = ωt − ωt + 2ζτω = 0.0043،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ ∈ss= 0.00436 = 2ζτω ﻟﻛن،ω = 0.1745𝑟𝑎𝑑/𝑠 ∴ 0.00436 = 2ζτ × 0.1745 ∴ 2ζτ = 0.00436 0.1745 = 0.025 → (1) اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘: 𝑘 = 𝐶 2ζτ = 8000 0.025 = 320,000𝑁. 𝑚/𝑟𝑎𝑑 = 320𝐾𝑁. 𝑚/𝑟𝑎𝑑 اﻟﺗﺧميد ﻧﺳﺑﺔ ]بζ: τ2 = I K ∴ τ = √ I K = √ 340 320 × 103 = 0.0326𝑠/𝑟𝑎𝑑 2ζ × 0.0326 = 8000 320×103 ∴ ζ = 8000 2 × 0.0326 × 320 × 103 = 0.383 اﻟمﺧمد اﻟطﺑيﻌﻲ اﻟﺗردد [ج𝜔d:
- 122. ωd = ωn√1 − ζ2 ωn = 1 τ = 1 0.0326 = 30.7𝑟𝑎𝑑/𝑠 ∴ ωd = 30.7√1 − 0.3832 = 28.36 𝑟𝑎𝑑/𝑠 اﻟمﺧمد ﻏير اﻟطﺑيﻌﻲ اﻟﺗردد ]د𝜔n: ωn = 30.7 𝑟𝑎𝑑/𝑠 5مدﻓﻊ ﻗاﻋدة ﻛﺗﻠﺔ ]ﻟﻠطائرات مضاد7.5 𝑀𝑔دوراﻧﮭا مﺣور ﺣول اﻟﺗدويمﻲ اﻟﻘطر وﻧﺻف 0.76 𝑚،ﺑﻌد من ﻟﻠمدﻓﻊ اﻟزاويﺔ ﻟإلزاﺣﺔ اﻟﺧطأ ﺗفاضل زائد طردي ﺗﺣﻛم ﺟﮭاز يﺳﺗﺧدم.مﻌامل اﻟمدﻓﻊ مﺣور ﺣول اﻟﺗﺧميد10.9 𝐾𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،ﻗﺻوى ﺑﺳرﻋﺔ اﻟمدﻓﻊ ﺗﺣريك ﻋﻧدمﻘدارھا 25 𝑟𝑒𝑣/𝑚𝑖𝑛ﻋن اﻟﺗﺧﻠف يزيد أﻻ يﺟب2°ﺗﺳاوي اﻟﺗﺧميد وﻧﺳﺑﺔ0.5،:أوﺟد ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت ]أ.اﻟﺧطأ مفاﺟئ دﺧل ﺗﺳﻠيط ﻋﻧد اﻟدورة زمن ]ب. اﻟﺣموﻟﺔ ﺗﺣريك ﻋﻧد اﻟمؤازرة مﺣرك ﻗدرة ]ج.اﻟﻘﺻوى ﺑاﻟﺳرﻋﺔ :اﻟﺣل kG = 0.76 𝑚 ، 𝑚 = 7.5 × 103 𝑘𝑔،ﻋزم ﻗطر ﻧﺻف أو اﻟﺗدويمﻲ اﻟﺣرﻛﺔ ﻗطر ﻧﺻف اﻟذاﺗﻲ اﻟﻘﺻور. 𝐼 = 𝑚𝐾 𝐺 2 = 7.5 × 103 × 0.762 = 4332𝑘𝑔𝑚2 ،اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم 𝐶 = 10.9 × 103 𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،اﻟمدﻓﻊ مﺣور ﺣول اﻟﺗﺧميد مﻌامل 𝑁 𝑚𝑎𝑥 = 25𝑟𝑒𝑣/𝑚𝑖𝑛 ωmax = 25×2π 60 = 2.618𝑟𝑎𝑑/𝑠،اﻟﻘﺻوى اﻟﺳرﻋﺔ ∈ss= 2°×𝜋 180 = 0.035𝑟𝑎𝑑،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ ζ = 0.5،اﻟﺗﺧميد ﻧﺳﺑﺔ اﻟﺗﺣﻛم ﺛاﺑت ]أ𝑘اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت𝑘1
- 123. انحدار لدخل االستجابة، θi = ω𝑡 ( اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔP.I:) 𝜃 𝑜 = ω𝑡 + 𝒬 Dθo = ω D2 θo = 0 اﻟﺣرﻛﺔ مﻌادﻟﺔ: 𝑘( 𝜃𝑖 − 𝜃 𝑜) − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 − 𝑘𝜃 𝑜 − 𝐶𝐷𝜃 𝑜 = 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 = 𝑘𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 = 𝜃 𝑜[ 𝑘 + 𝐶𝐷 + 𝐼𝐷2] 𝜃 𝑜 𝜃𝑖 = 𝑘 𝑘 + 𝐶𝐷 + 𝐼𝐷2 𝜃 𝑜 𝜃𝑖 = 1 1 + 𝐶 𝐾 𝐷 + 𝐼 𝐾 𝐷2 اﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ ﻟﻠﺻيغﺔ مﻧاظرة ھﻲ واﻟﺗﻲ 1 1+2ζτD+τ2D2 𝜃 𝑜 + 𝑐 𝑘 𝐷𝜃 𝑜 + 1 𝑘 𝐷2 𝜃 𝑜 = 𝜃𝑖 𝜔𝑡 + 𝒬 + 𝑐 𝑘 𝜔 + 𝐼 𝑘 × 0 = 𝜔𝑡 ω𝑡 + 𝒬 + 𝑐 𝑘 𝜔 = 𝜔𝑡 ∴ 𝒬 = − 𝑐 𝑘 𝜔 ﻟﻛن𝜃 𝑜 = ω𝑡 + 𝒬 ∴ 𝜃 𝑂ω𝑡 − 𝑐 𝑘 𝜔 θi = ω𝑡 ∈ss= 𝜃i − 𝜃 𝑜،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﻓﻲ ﺧطأ ∈ 𝑆𝑆= ωt − (𝜔t − c k ω) ∴∈ 𝑆𝑆= ω𝑡 − 𝜔𝑡 + 𝑐 𝑘 𝜔 = 𝑐 𝑘 𝜔 اﻟمرﻛب ﻟﻠﺗأﺧر اﻟﻘياﺳيﺔ اﻟﺻورة مﻊ اﻻﻧﺗﻘال داﻟﺔ ﺑﺗﻧاظر، 𝑐 𝑘 = 2𝜁𝜏 → (1)
- 124. 𝐼 𝑘 = 𝜏2 → (2) َّأن وﺑما،∈ss= 𝐶 K ω → (3)أن ﺑما في بالتعويض( المعادلة3:) 0.035 = 10.9 × 103 𝑘 × 2.618 ∴ 𝑘 = 10.9 × 103 ×× 2.618 0.035 = 815320𝑁. 𝑚/𝑟𝑎𝑑 = 815.32𝐾𝑁. 𝑚/𝑟𝑎𝑑 ( المعادلة من2) I 𝑘 = τ2 ، 4332 815.32 × 103 = 𝜏2 ∴ τ = 0.0729𝑠𝑒𝑐/𝑟𝑎𝑑 ﻟﻠﺧطأ األوﻟﻰ اﻟﺗفاضﻠيﺔ اﻟمﺷﺗﻘﺔ ﺑإضاﻓﺔ، :الحركة معادلة 𝑘(∈ +𝑘1 𝐷 ∈) = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 ∈= θi − 𝜃 𝑜 𝑘[( 𝜃𝑖 − 𝜃 𝑜) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃 𝑜)] = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 − 𝑘𝜃 𝑜 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃 𝑜 = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃 𝑜 + 𝑘𝑘1 𝐷𝜃 𝑜 + 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝜃 𝑜[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐶𝐷 + 𝐼𝐷2] 𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝑘𝜃 𝑜 [1 + 𝑘1 𝐷 + 𝐶 𝐾 𝐷 + 𝐼 𝐾 𝐷2 ]
- 125. 𝑇. 0 = 𝜃 𝑜 𝜃𝑖 = 1 + k1D 1 + (𝑘1 + 𝐶 𝐾 ) 𝐷 + 𝐼 𝐾 𝐷2 𝜃 𝑜 𝜃𝑖 = 1 + k1D 1 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷 + 𝐼 𝐾 𝐷2 → (3) :القياسية للصيغة مناظرة هي والتي 1 1 + 2ζτD + τ2D2 𝜃 𝑜 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷𝜃 𝑜 + 𝐼 𝐾 𝐷2 𝜃 𝑜 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖 :االنحدار لدخل االستجابة θi = ω𝑡 𝐷θi = ω ( المستقرة الحالةP.I): 𝜃 𝑜 = ω𝑡 + 𝒬 Dθo = ω D2 θo = 0 ω𝑡 + 𝒬 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔 𝒬 = 𝑘1 𝜔 − ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝜔 = [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 𝜃 𝑜 = ω𝑡 + [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] ω 𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃 𝑜 𝜖 𝑠𝑠 = ω𝑡 − 𝜔𝑡 − [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 𝜖 𝑠𝑠 = − [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 = [ 𝑘𝑘1 + 𝑐 𝑘 − 𝑘1] 𝜔 المعادلة من(3)، 𝑘𝑘1 + 𝑐 𝑘 = 2ζτ → (4) 𝐼 𝐾 = 𝜏2 → (5) من( المعادلة4)، 815.32 × 103 𝑘1 + 10.9 × 103 815.32 × 103 = 2 × 0.5 × 0.0729 ⇒∴ 𝑘1 = 0.0595𝑠𝑒𝑐
- 126. مفاﺟئ دﺧل ﺗﺳﻠيط ﻋﻧد اﻟدورة زمن ]ب: 𝑡 𝑝 = 2𝜋 𝜔 𝑑 ،اﻟدورة زمن 𝜔 𝑑 = 𝜔 𝑛√1 − 𝜁2 = 1 𝜏 √1 − 𝜁2 ∴ 𝜔 𝑑 = 1 0.0729 √1 − 0.52 = 11.88𝑟𝑎𝑑/𝑠 ∴ 𝑡 𝑝 = 2𝜋 11.88 = 0.529𝑠𝑒𝑐 ﻋﻧد اﻟمؤازرة مﺣرك ﻗدرة ]جاﻟﻘﺻوى ﺑاﻟﺳرﻋﺔ اﻟﺣموﻟﺔ ﺗﺣريك: 𝑃 = 𝑇𝜔،اﻟﻘدرة 𝑇 = 𝐶𝜔،اﻟﻌزم ∴ 𝑃 = 𝐶𝜔2 = 10.9 × 103 × 2.6182 = 74707.8𝑊 = 74.71𝐾𝑊 6ﺗﺳاوي ﻛﺗﻠﺔ ﻟه ﻟﻠطائرات مضاد مدﻓﻊ ]7500𝑘𝑔دوراﻧه مﺣور ﺣول ﺗدويمﻲ ﻗطر وﻧﺻف 0.75𝑚طر يﺗﻧاﺳب ًاﻋزم طِّﺳﻠُﺗ ﻟﻠمدﻓﻊ ﺔِّاﻟزاوي اﻟﺣرﻛﺔ ﻓﻲ اﻟﺗﺣﻛم وآﻟيﺔاﻟﺧطأ وﺗفاضل اﻟﺧطأ مﻊ ًاد واﻟﺧرج اﻟدﺧل ﺑين.مﺣوره ﻓﻲ ﻟزج ﻟﺗﺧميد اﻟمدﻓﻊ يﺗﻌرض ﻛمامﻌامﻠه10 𝐾𝑁. 𝑚( 𝑟𝑎𝑑/𝑠)إذا اﻟمدﻓﻊ ﺗﺣريك ﻋﻧد اﻟمطﻠوب ﻛانﺗﺳاوي اﻟﺗﻲ اﻟﻘﺻوى اﻟدوران ﺑﺳرﻋﺔ25𝑟𝑒𝑣/𝑚𝑖𝑛ﻻ أن اﻟﺧرج ﺗﺧﻠف يﺗﺟاوز2°ﺛ األوﻟيﺔ األﺳس من ًامﺑﺗدئ أوﺟد .اﻟدﺧل ﻋناﻟﺧطأ اﺑت𝑘ﺗفاضل وﺛاﺑت اﻟﺧطأk1. :اﻟﺣل ﻟﻠطائرات مضاد مدﻓﻊ، 𝑚 = 7500𝑘𝑔 , 𝑘 𝐺 = 0.75𝑚 𝐼 = 𝑚𝑘 𝐺 2 = 7500 × 0. 752 = 4218.75𝑘𝑔𝑚2 ،اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم 𝑇𝛼 ∈ +𝐷𝜖 𝐶 = 10𝐾𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠) Nmax = 25𝑟𝑒𝑣/𝑚𝑖𝑛 ∴ ωmax = 25 × 2π 60 = 2.618𝑟𝑎𝑑/𝑠 ∈ss= 2° = 2° × π 180 = 0.035𝑟𝑎𝑑 𝑘 =?اﻟﺧطأ ﺛاﺑت 𝑘1 =?اﻟﺧطأ ﺗفاضل ﺛاﺑت
- 127. الحركة معادلة: 𝑘(∈ +𝑘1 𝐷 ∈) = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 ∈= θi − 𝜃0 𝑘[( 𝜃𝑖 − 𝜃 𝑜) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃 𝑜)] = 𝐶𝐷𝜃0 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 − 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃 𝑜 = 𝐶𝐷𝜃 𝑜 + 𝐼𝐷2 𝜃 𝑜 𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃0 + 𝐶𝐷𝜃0 + 𝐼𝐷2 𝜃0 𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝜃0[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐶𝐷 + 𝐼𝐷2] 𝑘𝜃𝑖(1 + 𝑘1 𝐷) = 𝑘𝜃0 [1 + 𝑘1 𝐷 + 𝐶 𝑘 𝐷 + 𝐼 𝑘 𝐷2 ] 𝜃0 𝜃𝑖 = 1 + 𝑘1 𝐷 1 + (𝑘1 + 𝐶 𝑘 ) 𝐷 + 𝐼 𝑘 𝐷2 → (1) ( المعادلة بضرب1:علﻰ نحصل ًاعكسي ) 𝜃0 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷𝜃0 + 𝐼 𝑘 𝐷2 𝜃0 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖 → (2) :انحدار لدخل االستجابة θi = ω𝑡 𝐷θi = ω الحالة( المستقرةP.I): θ0 = ω𝑡 + 𝒬 Dθ0 = ω 𝐃 𝟐 𝛉 𝟎 = 𝟎 ( المعادلة في بالتعويض2:) ω𝑡 + 𝒬 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔
- 128. 𝒬 = 𝑘1 𝜔 − ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝜔 = [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 ∴ 𝜃0 = ω𝑡 + [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] ω 𝜖 𝑠𝑠 = 𝜃𝑖 − 𝜃0 𝜖 𝑠𝑠 = ω𝑡 − 𝜔𝑡 − [𝑘1 ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 𝜖 𝑠𝑠 = − [𝑘1 − ( 𝑘𝑘1 + 𝑐 𝑘 )] 𝜔 = [ 𝑘𝑘1 + 𝑐 𝑘 − 𝑘1] 𝜔 → (3) اﻟمﻌادﻟﺔ من(1:ھﻲ اﻟﺗﻲ اﻟﻘياﺳيﺔ اﻟﺻيغﺔ مﻊ وﺑاﻟﺗﻧاظر ) 1 1 + 2𝜁𝜏𝐷 + 𝜏2 𝐷2 𝑘𝑘1 + 𝑐 𝑘 = 2ζτ → (4) 1 𝐾 = 𝜏2 → (5) المعادلة من( 𝟑): 0.035 = [ 𝑘𝑘1 + 10 × 103 𝑘 − 𝑘1] × 2.618 0.01337 = 𝑘𝑘1 + 10 × 103 − 𝑘𝑘1 𝑘 0.01337 = 10 × 103 𝑘 ∴ 𝑘 = 10 × 103 0.01337 = 747943.16𝑁. 𝑚/𝑟𝑎𝑑 = 748𝐾𝑁. 𝑚/𝑟𝑎𝑑 من( المعادلة5:) τ = √ 𝐼 𝐾 = √ 4218.75 748 × 103 = 0.0751𝑠𝑒𝑐/𝑟𝑎𝑑 𝜔 𝑑 = 𝜔 𝑛√1 − 𝜁2 2.618 = 1 0.075 √1 − 𝜁2 ⇒∴ ζ = 0.98 ( المعادلة من4:) 748 × 103 𝑘1 + 10 × 103 748 × 103 = 2 × 0.98 × 0.0751
- 129. ∴ 𝑘1 = 0.134𝑠𝑒𝑐 7]ﻋزم اﻟﺣموﻟﺔ ﺑاﻋﺗﺑار رادار ھوائﻲ ﺗوﺟيه ﻓﻲ ﺗﺣﻛم آلﻟيﺔ اﻟمميزة اﻟمﻌادﻟﺔ أوﺟداﻟﻘﺻور اﻟﮭوائﻲ ﻟﺑرج اﻟذاﺗﻲاﻟﺑرج ﻛراﺳﻲ ﻓﻲ ﻟزج ﺗﺧميد مﻊ،ﻟﺗﺻﺣيح اﻟﺣموﻟﺔ ﻋﻠﻰ طَّﻠاﻟمﺳ واﻟﻌزماﻟوضﻊ إضاﻓﺔ أﺛر ھو ما .واﻟفﻌﻠﻲ اﻟمرﻏوب اﻟزاوي اﻟوضﻊ ﺑين اﻟفرق مﻊ ًاطرد يﺗﻧاﺳب.اﻟفرق ﺗفاضل ﻟﻠﺣموﻟﺔ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم0.2𝑘𝑔𝑚2 اﻟﺗﺧميد ومﻌامل7𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)وﻋزماﻟﺗﺻﺣيح رُِّوﻓيﻛﮭرﺑائﻲ مﺣرك ﺑواﺳطﺔدواره ﻗﺻور ﻋزم12 × 10−6 𝑘𝑔𝑚2 ﺑين اﻟﺗروس وﺻﻧدوق اﻟمﺣركﺑﻧﺳﺑﺔ اﻟﺳرﻋﺔ ضُِّﺧفي واﻟﺣموﻟﺔ100:1،اآلﺗﻲ أوﺟد: اﻹﺳﺗﻘراري اﻟﺗﺧﻠف ﻛان إذا واﻟفﻌﻠﻲ اﻟمرﻏوب ﺑين ﻓرق زاويﺔ درﺟﺔ ﻟﻛل اﻟمﺣرك ﻋزم ]أ اﻟمﺳموح0.25°ﺑﺳرﻋﺔ اﻟﺣموﻟﺔ دوران ﻋﻧد30𝑟𝑒𝑣/𝑚𝑖𝑛. إﻟﻰ األﻗﺻﻰ اﻟﺗﺟاوز ﻟﺣد اﻟفرق ﺗفاضل ﺛاﺑت ]ب20%. اﻟﺣل: 𝑇 ∝ { 𝜖 + 𝑘1 𝐷𝜖} 𝑇 = 𝑘{ 𝜖 + 𝑘1 𝐷𝜖} = 𝑘[( 𝜃𝑖 − 𝜃0) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃0)] 𝐼 = 0.2𝑘𝑔𝑚2 ∈ 𝑠𝑠= 𝜃𝑖 − 𝜃0 = 0.25° = 0.25° × 𝜋 180 𝑟𝑎𝑑 𝜔𝑖 = 30𝑟𝑒𝑣/ min = 30 × 2𝜋 60 = 𝜋𝑟𝑎𝑑/𝑠 𝑐 = 7𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠) 𝐼 𝑚 = 12 × 10−6 𝑘𝑔𝑚2 𝐺𝑅 = 100/1اﻟﺗروس ﻧﺳﺑﺔ ]أ𝑇 𝑚/𝜖 𝑠𝑠 =? ]بP. O = 0.2 ﻋﻧدما 𝑘1 =?
- 130. [ 𝑇 𝑚 − 𝐼 𝑚 𝐷2 𝜃 𝑚] × 𝐺𝑅 = 𝑘{( 𝜃𝑖 − 𝜃0) + 𝑘1 𝐷( 𝜃𝑖 − 𝜃0)} = 𝐼𝐷2 𝜃0 + 𝐶𝐷𝜃0 𝑘𝜃𝑖 − 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃𝑖 − 𝑘𝑘1 𝐷𝜃0 = 𝐼𝐷2 𝜃0 + 𝐶𝐷𝜃0 𝑘𝜃𝑖 + 𝑘𝑘1 𝐷𝜃𝑖 = 𝑘𝜃0 + 𝑘𝑘1 𝐷𝜃0 + 𝐼𝐷2 𝜃0 + 𝐶𝐷𝜃0 𝑘𝜃𝑖[1 + 𝑘1 𝐷] = 𝜃0[ 𝑘 + 𝑘𝑘1 𝐷 + 𝐼𝐷2 + 𝐶𝐷] 𝜃𝑖[1 + 𝑘1 𝐷] = 𝜃0 [1 + 𝑘1 𝐷 + 𝐼 𝐾 𝐷2 + 𝐶 𝐾 𝐷] 𝜃0 𝜃𝐼 = 1+𝑘1 𝐷 1+𝑘1 𝐷+ 𝐼 𝐾 𝐷2+ 𝐶 𝐾 𝐷 = 1+𝑘1 𝐷 1+𝑘1 𝐷+ 𝐶 𝐾 𝐷+ 𝐼 𝐾 𝐷2 𝜃0 𝜃𝐼 = 1 + 𝑘1 𝐷 1 + (𝑘1 + 𝐶 𝐾 ) 𝐷 + 𝐼 𝐾 𝐷2 𝜃0 𝜃𝐼 = 1 + 𝑘1 𝐷 1 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷 + 𝐼 𝐾 𝐷2 → (1) ﺗﻛون اﻟﺗﻲ:اﻟمﻌياريﺔ ﻟﻠﺻيغﺔ مﻧاظرة 1 1 + 2ζτD + τ2D2 ( ﻟﻠمﻌادﻟﺔ اﻟﻌﻛﺳﻲ ﺑاﻟضرب1ﻋﻠﻰ ﻧﺣﺻل )، θ0 + ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷𝜃0 + 𝐼 𝐾 𝐷2 𝜃0 = 𝜃𝑖 + 𝑘1 𝐷𝜃𝑖 مرﻛب ﺗأﺧر اﻧﺗﻘاﻟﮭا أو ﺗﺣويﻠﮭا ﻋامل اﻟﺗﻲ اﻟﻌﻧاﺻر اﺳﺗﺟاﺑﺔ :االنحدار لدخل االستجابة θi = ω𝑡 𝐷θi = ω ( المستقرة الحالةP.I): θ0 = ω𝑡 + 𝒬 Dθ0 = ω D2 θ0 = 0 𝜔𝑡 + 𝒬 + ( 𝑘𝑘1 + 𝐶 𝑘 ) 𝜔 + 0 = 𝜔𝑡 + 𝑘1 𝜔 𝒬 = 𝑘1 𝜔 − ( 𝑘𝑘1 + 𝐶 𝑘 ) 𝜔 𝒬 = ω [𝑘1 − ( 𝑘𝑘1 + 𝐶 𝑘 )] 𝒬 = ω [( 𝑘𝑘1 − 𝑘𝑘1 − 𝐶 𝑘 )]
- 131. ∴ 𝒬 = − 𝑐 𝑘 𝜔 ∴ θ0 = ω𝑡 − 𝑐 𝑘 𝜔 ∈ss= 𝜃i − θ0 = 𝜔 𝑡 − 𝜔 𝑡 + 𝐶 𝐾 𝜔،اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﻓﻲ ﺧطأ ∴ 𝜖 𝑠𝑠 = 𝑐 𝑘 𝜔 𝜖 𝑠𝑠 = 0.25 × 𝜋 180 = 4.363 × 10−3 𝑟𝑎𝑑 𝑐 = 7𝑁. 𝑚𝑠 𝑟𝑎𝑑 , 𝜔 = 𝜋 𝑟𝑎𝑑/𝑠 ∴ 𝑘 = 𝐶𝜔 𝜖 𝑠𝑠 = 7 × 𝜋 4.363 × 10−3 = 5040.4𝑁. 𝑚/𝑟𝑎𝑑 𝑇 𝑚 = 𝑘𝜖 𝑠𝑠 𝐺𝑅 𝑇 𝑚 𝜖 𝑠𝑠 = 𝑘 𝐺𝑅 = 5040 100 = 50.4𝑁. 𝑚 𝑃. 𝑂 = 100𝑒 −𝜁𝜋 √1−𝜁2⁄ ،اﻟمئويﺔ اﻟﻘﺻوى اﻟمﺟاوزة 𝑒 −𝜁𝜋 √1−𝜁2⁄ = 0.2 −𝜁𝜋 √1 − 𝜁2 𝑙𝑜𝑔𝑒 = 𝑙𝑜𝑔0.2 −𝜁𝜋 √1 − 𝜁2 = 𝑙𝑜𝑔0.2 𝑙𝑜𝑔𝑒 = −1.61 𝜁2 𝜋2 1 − 𝜁2 = 1.612 1.612 − 1.612 𝜁2 = 𝜁2 𝜋2 1.612 𝜁2 + 𝜁2 𝜋2 = 1.612 ζ = √ (1.61)2 1.612 + 𝜋2 = 0.456 :القياسية الصيغة مﻊ بالتناظر 2𝜁𝜏𝐷 = ( 𝑘𝑘1 + 𝑐 𝑘 ) 𝐷
- 132. 2𝜁𝜏 = 𝑘𝑘1 + 𝑐 𝑘 → (2) ،ًاأيض𝜏2 𝐷2 = 𝐼 𝐾 𝐷2 ∴ 𝜏2 = 𝐼 𝐾 ∴ τ = √ 𝐼 𝐾 = √ 0.2 5040 = 6.3 × 10−3 𝑠𝑒𝑐/𝑟𝑎𝑑 ( المعالة من2)، 2 × 0.456 × 6.3 × 10−3 = 5040𝑘1 + 7 5040 ∴ 𝑘1 = 4.36 × 10−3 𝑠𝑒𝑐 2.6بَّﻛرُماﻟ رُﺧاﻟﺗأ ﻋﻧاﺻر ﻓﻲ اضاﻓيﺔ مﺳائل: 1اﻟﺧطأ ﺗفاضل زائد طردي ﺗﺣﻛم ﺗﺳﺗﺧدم اﻟﺑﻌد ﻋﻠﻰ من اﻟوضﻊ ﻓﻲ ﺗﺣﻛم مﻧظومﺔ ]ﻟﺗﺣريك اﻟذاﺗﻲ ﻗﺻورھا ﻋزم ﺣموﻟﺔ9 𝑘𝑔𝑚2 مﻌامﻠه ﻟزج ﺗﺧميد مﻊ60 𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)ﺛاﺑت ﻛان إذا اﻟطردي اﻟﺗﺣﻛم4500 𝑁. 𝑚/𝑟𝑎𝑑اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت ﻓﻲ ًامضروﺑ اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت يﺳاوي120𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،ﺑﺳرﻋﺔ اﻟدﺧل ﻋمود دوران ﻋﻧد اﻹﺳﺗﻘراري اﻟﺧطأ أوﺟد 2𝑟𝑎𝑑/𝑠،مئويﺔ مﺟاوزة أﻗﺻﻰ ﻛذﻟك أوﺟدﻋن ﻋﺑارة اﻟدﺧل ﻛان إذاداﻟﺔأﺣاديﺔ ﺧطوة. 𝑨𝒏𝒔. (𝟐𝟏. 𝟏% ؛ 𝟎. 𝟎𝟐𝟔𝟕 𝒓𝒂𝒅) 2ﺑﻌد ﻋﻠﻰ من اﻟوضﻊ ﻓﻲ ﺗﺣﻛم ﺟﮭاز ]،ﺣموﻟﺔ ك ُِّﺣري أن مطﻠوبذاﺗﻲ ﻗﺻور ﻋزم ذاتمﻘداره 2.95𝑘𝑔𝑚2 اﻟذاﺗﻲ اﻟﻘﺻور وﻋزماﻟمؤازرة ﻟمﺣرك3.16 × 103 𝑘𝑔𝑚2 ،اﻟﺗﺧميد ومﻌامل ﻋﻠﻰاﻟمﺣرك ﻋمود1.360𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)اﻟمﺣرك وﺳرﻋﺔ ،20مرةاﻟﺣموﻟﺔ ﺳرﻋﺔ.ﻛان إذا ﺣدود ﻓﻲ اﻟﺗﺧﻠف0.5°اﻟﺳرﻋﺔ ﺗﻛون ﻋﻧدما25𝑟𝑒𝑣/𝑚𝑖𝑛اﻟدﺧل ﺗغيير ﻋﻧد ﺗﺟاوز يﺣدث وﻻ ﻓﺟأة.اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟطردي اﻟﺗﺣﻛم ﺛاﺑت أوﺟد..ﻟﻠمﻧظومﺔ اﻟﺗﺧميد مﻌامل أوﺟد 𝑨𝒏𝒔. (𝟏𝟔𝟑𝑲𝑵. 𝒎 𝒓𝒂𝒅 ، 𝟎. 𝟎𝟎𝟔𝟖𝟒𝒔 ، 𝟏𝟔𝟔𝟎𝑵𝒎/( 𝒓𝒂𝒅/𝒔)) 3اﻟﺳرﻋﺔ ﻓﻲ ﺗﺣﻛم مﻧظومﺔ ﻓﻲ ]،اﻟﻌزم يﺗزايد𝑇dاﻟﺳرﻋﺔ ﻓرق مﻊ ًاطرد اﻟﺣموﻟﺔ ﻋﻠﻰ اﻟمﺳﻠط واﻟﺧرج اﻟدﺧل ﺑين𝜔eﺑمﻘدار0.01𝑁𝑚/( 𝑟𝑎𝑑/𝑠)،ﻗﺻور ﻋزم ذات ﺣداﻓﺔ ﻋن ﻋﺑارة اﻟﺣموﻟﺔ ذاﺗﻲ0.5𝑘𝑔𝑚2 مﻌامﻠه ﻟﺗﺧميد ض َّومﻌر0.04𝑁. 𝑚/( 𝑟𝑎𝑑/𝑠)،:اآلﺗﻲ أوﺟد اﻟﻌال ]أﺑين ﻗﺔωeو 𝑇𝑑اﻟﺣموﻟﺔ دوران ﻋﻧدﺑﺳرﻋﺔ150 𝑟𝑎𝑑/𝑠.اﻟﺧرج مﻊ اﻟدﺧل ﺗﺳاوي ﻋﻧد اﻟﺣموﻟﺔ دوران ﻋﻧد ﻟﻠمﻧظومﺔ اﻟﺳرﻋﺔ ﺛاﺑت ]بﺑﺳرﻋﺔ150 𝑟𝑎𝑑/𝑠مﻊ اﻟدﺧل ﺗﺳاوي ﻋﻧد .اﻟﺧرج مﻘدارھا ﻗيمﺔ إﻟﻰ اﻟدﺧل رﻓﻊ ﻋﻧد اﻟﻧﮭائيﺔ اﻻﺳﺗﻘراريﺔ اﻟﺳرﻋﺔ ]ج180 𝑟𝑎𝑑/𝑠. 4اﻟﻛﺗﻠﺔ أدﻧاه َّﺣﺔضاﻟمو اﻟمﻧظومﺔ ﻓﻲ ]𝑚مﻘدارھا2𝑘𝑔اﻟياي وﻛزازة𝑘ﺗﺳاوي800𝑁/𝑚 اﻟﺗﺧميد ومﻌامل𝐶يﺳاوي15𝑁/( 𝑚/𝑠)ﻟﻠمﻧظومﺔ اﻻﻧﺗﻘال داﻟﺔ أوﺟد،:أوﺟد ﺛم
- 133. اﻟدﺧل يﻛون ﻋﻧدما اﻻﺳﺗﺟاﺑﺔ ]أ𝑥iأﺣاديﺔ ﺧطوة داﻟﺔ،ﻟﻠمﺟاوزة اﻟﻘﺻوى اﻟمئويﺔ اﻟﻧﺳﺑﺔ ھﻲ وما ھذه ﻓﻲ.اﻟﺣاﻟﺔ ﻛان إذا اﻻﺳﺗﻘراريﺔ اﻻﺳﺗﺟاﺑﺔ ]بxi = 0.01 sin 15𝑡. 5اﻧﺣدار ﻟداﻟﺔ أدﻧاه اﻟﻌﻧﺻر اﺳﺗﺟاﺑﺔ أوﺟد ]{ 𝑟𝑎𝑚𝑝 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛}اﻟمﺧمد ﻓائدة ًامﺑيﻧ𝑐1. 6ﺛاﺑت طردي ﺗﺣﻛم ﺛاﺑت ذات مﺧمد مؤازرة آﻟيﺔ ]𝑘ﺗﺧميد ومﻌامل𝑐.اﻟﺧطأ أن ُالﺣظي ﺑه اﻟمﺳموح أضﻌاف ﻋﺷرة ُﻌادلي اﻧﺣدار دﺧل ﺗﺳﻠيط ﻋﻧد اﻻﺳﺗﻘراري.ﺑﺗغيير ذﻟك ﺗﺻﺣيح ﺗم اﻟﺛاﺑت𝑘ﺗغيير دون اﻟﺗﺧميد ﻧﺳﺑﺔ ﺗظل ﺑﺣيث اﻟﺧطأ ﺑﺗفاضل مُّﻛﺗﺣ وإضاﻓﺔ.اﻟﺗﺣﻛم ﺛاﺑت أوﺟد اﻟطردي.اﻟﺧطأ ﺗفاضل ﺗﺣﻛم وﺛاﺑت اﻟﺟديد 𝑨𝒏𝒔 ∙ (𝟏𝟎𝒌، 𝟎. 𝟐𝟏𝟔 𝒄 𝒌 ) 7ﺑﺗغذيﺔ ﺗﺣﻛم ﻧظام ]أدﻧاه اﻟﺷﻛل ﻓﻲ ﺗوضيﺣه يﺗم اﺷﺗﻘاﻗيﺔ ﺧﻠفيﺔ وﺗغذيﺔ وﺣدة ذات ﺧﻠفيﺔ.إذا ًاﺻفر ﺗﺳاوي اﻻﺷﺗﻘاﻗيﺔ اﻟﺧﻠفيﺔ أو اﻟمرﺗدة اﻟﺗغذيﺔ ﻛاﻧت.اﻹﺧماد أو اﻟمضاءﻟﺔ ﻧﺳﺑﺔ ِّدﺣدواﻟﺗردد ﻟدﺧل اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ وﺧطأ ﻟﻠﻧظام اﻟطﺑيﻌﻲوﺣدة ذو اﻧﺣدار.مضاءﻟﺔ ﻧﺳﺑﺔ ﻋﻠﻰ اﻟﺣﺻول يﺗم مﻘدارھا0.8اﻟﺛاﺑت ﻗيمﺔ ِّدﺣد .اﻻﺷﺗﻘاﻗيﺔ اﻟﺧﻠفيﺔ اﻟﺗغذيﺔ ﺑضﺑط𝑘اﻟﺷرط ھذا ﻟﺗﺣﻘيق،اﻟزيادة ِّروﻗد .وﺣدة ذو اﻧﺣدار ﻟدﺧل ﻟﻠﻧظام اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطأ ﻓﻲ 𝑨𝒏𝒔(𝝃 = 𝟎. 𝟓، 𝝎 𝒏 = 𝟒و 𝟎. 𝟐𝟓 ، 𝒌 = 𝟎. 𝟏𝟓و 𝟎. 𝟒)
- 134. 8ﺑالﺳﺗيك ﺳﺑاﻛﺔ ﻹﺟراء اﻟﺣرارة درﺟﺔ ]{ 𝑃𝑙𝑎𝑠𝑡𝑖𝑐 𝑚𝑜𝑢𝑙𝑑𝑖𝑛𝑔 𝑝𝑟𝑜𝑐𝑒𝑠𝑠}اﻟﺗﺣﻛم يﺗم ﺑﺗﺳﺧين ﻓيﮭا)أدﻧاه (اﻟﺷﻛل اﻟﺑالﺳﺗيﻛيﺔ ﺑاﻟﺷﺣﻧﺔ اﻟمﺣيط اﻟﺗﺟويف.مﻛاﻓئﺔ ﺣرارة يمد اﻟﺗﻧاﺳﺑﻲ اﻟمﺗﺣﻛم ﻟـ𝐵ﺑاﻟـ اﻟﺣرارة درﺟﺔ ﺧطأ ﻓﻲ مضروﺑﺔ( 𝐾)اﻟﺗﺟويف ﻋﻧد.ﺑمﻘدار اﻟﺗﺟويف ﺣرارة درﺟﺔ ﺗﺗغير 2 × 10−6 𝐾𝐽−1 ﻟﻠﺣرااﻟﺣرارة درﺟﺔ .اﻟمﺳﺗﺧﻠﺻﺔ أو اﻟمﻛﺗﺳﺑﺔ رة𝐶ﺗﺗغير اﻟﺑالﺳﺗيﻛيﺔ ﻟﻠﺷﺣﻧﺔ ﺑمﻘدار0.004 ( 𝐾𝑠−1)/𝐾ﺣرارة درﺟﺔ ﻓرق .اﻟﺗﺟويف ﺣرارة درﺟﺔ ﻓرق ﻓﻲ مضروﺑﺔ .ًاﺛاﺑﺗ اﻓﺗراضه يمﻛن اﻟﺗﺟويف اﻟمﺗﺣﻛم ﻛﺳب ﺣدد ]أ𝐵مﻘدارھا مضاءﻟﺔ ﺑﻧﺳﺑﺔ ﺧطوة ﻻﺳﺗﺟاﺑﺔ0.7. ﺳرﻋ زيادة يمﻛن ﻛيف وضح ]بﺔ.اﻟمضاءﻟﺔ درﺟﺔ ﻧفس ﻋﻠﻰ اﻟمﺣاﻓظﺔ يﺗم ﺑيﻧما اﻻﺳﺗﺟاﺑﺔ 𝑨𝒏𝒔( 𝟏. 𝟎𝟐 × 𝟏𝟎 𝟑 𝑱/𝒔𝑲) 9دوارة ﻛﺗﻠﺔ ﻓﻲ ﻟﻠﺗﺣﻛم ﺗﺳﺗﺧدم ﻛﮭرﺑائيﺔ مؤازرة ﻓﻲ ]،يﺳاوي اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم 100𝑘𝑔𝑚2 يﺳاوي اﻟمﺣرك ﻋزم ،1600𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑اﻟمضاءﻟﺔ وﻧﺳﺑﺔ اﻟمﺣاذاة منζﺗﺳاوي 0.5.ووضﻊ اﻟﺧرج ﻋمود وضﻊ ﺑين اﻻﻧﺗﻘال داﻟﺔ أوﺟد وﺑاﻟﺗاﻟﻲ اﻟﻧظام ﻟﮭذا اﻟﻛﺗﻠﻲ اﻟمﺧطط رِّطو .اﻟدﺧل ﺗﺣﻛم ﻋﺟﻠﺔ
- 135. 10طائرة ميل درﺟﺔ ﺗﺣﻛم ﻟﻧظام ھواء ﻧفق من ًاﺟزء ح ُِّوضي أدﻧاه اﻟﺷﻛل ﻓﻲ اﻟمﺧطط ].زاويﺔ اﻟميل𝜃0ھو اﻟطيار ودﺧل𝜃i،ھﻲ اﻟراﺳيﺔ اﻟﺳرﻋﺔ إﺷارة𝑉v،ﺑيﻧما𝜃e.اﻟﺻﻌود زاويﺔ ھﻲ اﻟمﺧطط ﺑﺗﺧفيض،.اﻟمغﻠﻘﺔ اﻟﺣﻠﻘﺔ اﻧﺗﻘال داﻟﺔ ﺣدد 11اﻟدﺣراج اﻟمﺣور ﺣول ذاﺗﻲ ﻗﺻور ﻋزم ﻟه اﻻﺧﺗﺑار ﺗﺣت ﻟﺳفيﻧﺔ ﻧموذج ]{ 𝑟𝑜𝑙𝑙 𝑎𝑥𝑖𝑠} مﻘداره1𝑘𝑔𝑚2 .)(اﻟدﺣرﺟﺔ اﻟدرﻓﻠﺔ ﻋزم{ 𝑟𝑜𝑙𝑙𝑖𝑛𝑔 𝑚𝑜𝑚𝑒𝑛𝑡}ﺳرﻋﺔ ﺑمﻌدل ﺗوﻟيده يﺗم اﻟذي 𝑟 𝑟𝑎𝑑𝑠−1ًاﺳاﻟﺑ يﻛونi. e. )وﺑمﻘدار )أدﻧاه اﻟﺷﻛل أﻧظر اﻟﺧارج إﻟﻰ0.8𝑟 𝑁. 𝑚.اﻻﺳﺗﻘرار ﻟﻠﺳفيﻧﺔ اﻟطﺑيﻌﻲمﻘداره اﺳﺗرﺟاع ﻋزم بُِّﺳﺑي2𝜙𝑁. 𝑚ﺑمﻘدار اﻟﺳفيﻧﺔ ﺗﺗدﺣرج ﻋﻧدما يﻌملϕ𝑟. ﺗرﻛيب ﻗرار أﺧذ َّمﺗ ﻟﻘداﻟدﺣرﺟﺔ ﻓﻲ ﺗﺣﻛم زﻋاﻧف،مﻘداره موﺟب ﻋزم ﺗﻧﺗج4δ𝑁. 𝑚اﺗﺟاه (ﻓﻲ )األمام ﺟﮭﺔ من ﺑاﻟﻧظر اﻟﺳاﻋﺔ ﻋﻘارب دوران،ﺣيثδاﻻﻧﺣراف زاويﺔ ھﻲ،ﺗﺣﻛم ﻧظام أدار إذا ﻟﻠﻘاﻧون ًاطﺑﻘ اﻟزﻋاﻧف اﻟدﺣرﺟﺔ: δ = 𝑎𝜙 + 𝑏 𝑑𝜙 𝑑𝑡 + 𝐶𝑟 أوﺟد𝑐، 𝑏، 𝑎:ﺑﺣيث مﻌﺗدﻟﺔ اﻟﺳفيﻧﺔ ﺗﺑﻘﻰ ]أ{upright}.مﺳﺗﻘر ﺗدوير ﺧالل مدﺣرﺟﺔ ﻏير مﻘداره طﺑيﻌﻲ ﺗردد ﻟﻠدﺣرﺟﺔ اﻟﻌاﺑرة اﻻﺳﺗﺟاﺑات ﺗمﺗﻠك ]ب2 𝑟𝑎𝑑𝑠−1 مﻘدارھا مضاءﻟﺔ وﻧﺳﺑﺔ 0.5.
- 136. 12يِّاﻟزاو اﻟوضﻊ ﻓﻲ ﻟﻠﺗﺣﻛم ﺗﺻميمﮭا يﺗم مؤازرة آﻟيﺔ ]دوارة ﻟﻛﺗﻠﺔﺑواﺳطﺔ اﺳﺗﻘرارھا يﺗم ﻟﻠﺗﺳارع مرﺗدة ﺗغذيﺔ.اﻟﻘﺻور ﻋزم يﻛونﻟﻠﻧظام اﻟذاﺗﻲ10−5 𝑘𝑔𝑚2 واﻟﻌزم ،اﻟﻠزج اﻻﺣﺗﻛاﻛﻲ ﻟﻛل𝑟𝑎𝑑يﺳاوي ﺛاﻧيﺔ ﻟﻛل10−4 𝑁. 𝑚اﻟمﺣرك وﻋزم𝑇mﺑـ إﻋطاؤه يﺗم: Tm = 4 × 10−3[ 𝜃e + ks2 θ0] 𝑁. 𝑚 اﻟﺗﺣﻛم مﻌادﻟه واﺷﺗق ﻟﻠﻧظام اﻟﻛﺗﻠﻲ اﻟمﺧطط ارﺳم.ﻗيمﺔ ِّدﺣد ﺑاﻟﺗاﻟﻲ𝑘اﻟمضاءﻟﺔ ﺳﺗﺟﻌل اﻟﺗﻲ ﺣرﺟﺔ.مﻘدارھا دﺧل ﻹﺷارة اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ ﺧطا ھو ما1.26𝑟𝑎𝑑𝑠−1 . 𝑨𝒏𝒔. ( 𝟐. 𝟑𝟒 × 𝟏𝟎−𝟑 ، 𝟏𝟒 𝐫𝐚𝐝) 13ذاﺗﻲ ﺑﻘﺻور ﺗﺣﻛم ﻧظام ]160kgm2 ﻓﻘط ﻟزﺟﺔ اﺣﺗﻛاك ﺑمضاءﻟﺔ ﺗﺷغيﻠه يﺗم،مﻌامﻠﮭا ﻗيمﺔ 640𝑁. 𝑚𝑟𝑎𝑑 −1 𝑠مﻘدارھا مضاءﻟﺔ ﻧﺳﺑﺔ يمﺗﻠك اﻟﻧظام ﻛان إذا0.4وﺧطأ اﻟطﺑيﻌﻲ اﻟﺗردد ِّدﺣد مﻘداره اﻧﺣدار داﻟﺔ دﺧل إﻟﻲ ﺗﻌريضه يﺗم ﻋﻧدما اﻟمﺳﺗﻘرة اﻟﺣاﻟﺔ10 𝑟𝑒𝑣/𝑚𝑖𝑛. أرﺑﻌﺔ إﻟﻲ اﻟطﺑيﻌﻲ اﻟﺗردد ُزادي ﺑﺣيث اﻟﻛﺳب ضﺑط ويﺗم ﻟﻠﻧظام ﺗفاضﻠﻲ ﺧطأ ﺗﺣﻛم إضاﻓﺔ يﺗم األﺻﻠيﺔ ﻗيمﺔ إضﻌافﻗيمﺗﮭا ﻋﻧد اﻟمضاءﻟﺔ ﻧﺳﺑﺔ ﻋﻠﻲ اﻟمﺣاﻓظﺔ يﺗم ﺑيﻧمااألﺻﻠيﺔ0.4ﺧطأ ِّدﺣد اﻟﺣاﻟﺔاﻟﺗفاضﻠﻲ اﻟزمن ﺛاﺑت ﻗيمﺔ وﺣدد اﻻﻧﺣدار دﺧل ﻟﻧفس اﻟﺟديد اﻟمﺳﺗﻘرةﻓﻲ إدﺧاﻟه يﺗم اﻟذي .اﻟﻧظام 𝑨𝒏𝒔 ∙ ( 𝟓 𝒓𝒂𝒅𝒔−𝟏 ، 𝟎. 𝟏𝟔𝟖 𝒓𝒂𝒅، 𝟎. 𝟎𝟏𝟎𝟓𝒓𝒂𝒅، 𝟎. 𝟎𝟑𝒔) 14اﺧﺗﺑار ﺟﮭاز ﻋﻠﻰ ﻟﺣداﻓﺔ اﻟزاوي اﻟوضﻊ ]{ 𝑇𝑒𝑠𝑡 𝑟𝑖𝑔}ﺗﺣﻛم ﻧظام ﺑواﺳطﺔ ﻓيه اﻟﺗﺣﻛم يﺗم أوﺗوماﺗيﻛﻲدﺧل راﻓﻌﺔ ﺣرﻛﺔ ﻟيﺗﺑﻊ ﻟﻠﺧطأ لِّفﻌُم اﻟﺣﻠﻘﺔ مغﻠق.ﻓﻲ اﻟراﻓﻌﺔ ﻋﻠﻰ اﻟمﺣاﻓظﺔ يﺗم ﺧالل ﺟيﺑيﺔ ﺗأرﺟﺣات±60°زاوي ﺑﺗردد𝜔 = 2𝑟𝑎𝑑/𝑠.ﻟﻠﺣداﻓﺔ اﻟضمﻧﻲ اﻟذاﺗﻲ اﻟﻘﺻور ﻋزم يﺳاوي150𝑘𝑔𝑚2 ﺗﻛون اﻟﺗﺣﻛم ازة َّوﻛز2400𝑁. 𝑚ﻟﻛل𝑟𝑎𝑑.اﻟمﺣاذاة ﻋدم من اﻻﺣﺗﻛاﻛﻲ اﻟﻌزم أﺣﺳبﺣرﺟﺔ مضاءﻟﺔ ﺑاﻓﺗراض .ﺣرﺟﺔ مضاءﻟﺔ ﻹﻧﺗاج اﻟمطﻠوب اﻟﻠزج، .اﻟﺗﺣﻛم وراﻓﻌﺔ اﻟﺣداﻓﺔ ﺑين اﻟزمن وﺗأﺧر ﻟﻠﺣداﻓﺔ اﻟﺗأرﺟح مطال أﺣﺳب 𝑨𝒏𝒔( 𝟏𝟐𝟎𝟎𝑵. 𝒎𝒓𝒂𝒅−𝟏 𝒔 ، 𝟒𝟖° ، 𝟎. 𝟒𝟔𝟒𝒔)
- 137. الثالث الفصل التحكم نظم استقرار من التحقق 3.1اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط رﺳم{ 𝑷𝒍𝒐𝒕𝒕𝒊𝒏𝒈 𝒓𝒐𝒐𝒕 𝒍𝒐𝒄𝒊}. 3.1.1مرﺗدة ﺗغذيﺔ وﺣدة ذات مغﻠﻘﺔ مﻧظومﺔ { 𝑪𝒍𝒐𝒔𝒆𝒅 𝒍𝒐𝒐𝒑 𝒘𝒊𝒕𝒉 𝒖𝒏𝒊𝒕𝒚 𝒇𝒆𝒆𝒅 𝒃𝒂𝒄𝒌}. ( اﻟﺷﻛل3.1مغﻠﻘﺔ مﻧظومﺔ ح ُِّوضي أدﻧاه )ﺧﻠفيﺔ ﺗغذيﺔ وﺣدة ذات ( رﻗم ﺷﻛل3.1ﺧﻠفيﺔ ﺗغذيﺔ وﺣدة ذات اﻟﺣﻠﻘﺔ مغﻠﻘﺔ مﻧظومﺔ ) األمامﻲ اﻟمﺳار اﻧﺗﻘال ﻋامل𝐺( 𝐷) = { 𝐹𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑜𝑝𝑒𝑟𝑎𝑡𝑜𝑟} اﻟمﻧظومﺔ اﻧﺗﻘال ﻋامل𝑇( 𝐷) = { 𝑆𝑦𝑠𝑡𝑒𝑚 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑜𝑝𝑒𝑟𝑎𝑡𝑜𝑟} 𝐺( 𝐷) = 𝜃 𝑜 ∈ , 𝑇( 𝐷) = 𝜃 𝑜 𝜃𝑖 𝐺( 𝐷) = 𝜃 𝑜 𝜃𝑖 − 𝜃 𝑜 = 𝜃 𝑜 ∈ 𝜃 𝑜 = 𝐺( 𝐷) ∈ أن وﺑما، ∈= 𝜃𝑖 − 𝜃 𝑜 ∴ θ0 = 𝐺( 𝐷)(θi − θ0) θ0 = 𝐺( 𝐷) 𝜃𝐼 − 𝐺( 𝐷) 𝜃0 θ0 + 𝐺( 𝐷) 𝜃0 = 𝐺( 𝐷) 𝜃𝑖 θ0[1 + 𝐺( 𝐷)] = 𝐺( 𝐷) 𝜃𝑖
- 138. ∴ θ0 θi = G(D) 1 + G(D) = 𝑇( 𝐷) → (3.1) اﺳﺗﺑدل𝐷ﺑــ𝑆:ﺣيث𝑆 = 𝛼 + 𝑗𝜔 ( المعادلة عن التعبير يمكن بالتالي3.1كاآلتي ): ∴ 𝑇( 𝑆) = 𝐺( 𝑆) 1 + 𝐺( 𝑆) → (3.2) )األﺳﻲ (ﻟﻠﺗأﺧر𝑇( 𝑆) = 1 1+𝜏𝑆 )اﻟمرﻛب (ﻟﻠﺗأﺧر𝑇( 𝑠) = 1 1+2𝜁𝜏𝑆+𝜏2 𝑠2 3.1.2(:اﻻﻧﺗﻘال ﻟداﻟﺔ اﻟﻌام اﻟﺷﻛل( 𝐺𝑒𝑛𝑟𝑎𝑙 𝐹𝑜𝑟𝑚 𝑜𝑓 𝑇𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛) 𝑇( 𝑠) = 𝑁( 𝑠) 𝐷( 𝑠) → (3.3) ﺣيث𝑁( 𝑠)اﻟﺣدود مﺗﻌددة ھﻲ{ 𝑃𝑜𝑙𝑦𝑛𝑜𝑚𝑖𝑎𝑙}ﻓﻲ𝑠ا ﻓﻲﻟﺑﺳط{ 𝑁𝑢𝑚𝑒𝑟𝑎𝑡𝑜𝑟} 𝐷( 𝑠)، 𝐷( 𝑠)ﻓﻲ اﻟﺣدود مﺗﻌددة ھﻲ𝑠اﻟمﻘام ﻓﻲ{ 𝐷𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑡𝑜𝑟}( اﻟمﻌادﻟﺔ ﻛﺗاﺑﺔ يمﻛن ﺑاﻟﺗاﻟﻲ3.3) اﻟﺗاﻟﻲ اﻟﻧﺣو ﻋﻠﻰ: 𝑇( 𝑠) = 𝑁( 𝑆) 𝐷( 𝑆) = 𝑎 𝑛( 𝑠 − 𝑠1)( 𝑠 − 𝑠2) … … … … … … … … ( 𝑠 − 𝑠 𝑛) 𝑏 𝑚( 𝑠 − 𝑠 𝑎)( 𝑠 − 𝑠 𝑏) … … … … … … . . . . ( 𝑠 − 𝑠 𝑚) → (3.4) ﺣيث𝑠1, 𝑠2, … . . , 𝑠 𝑛وھﻲ اﻟﺑﺳط ﺟذور ھﻲﻗيم𝑠ﺗﺟﻌل اﻟﺗﻲ𝑇( 𝑠) = 0ﺑأﺻفار ﺗﺳمﻰ و اﻻﻧﺗﻘال داﻟﺔ{ 𝑍𝑒𝑟𝑜𝑠 𝑜𝑓 𝑡ℎ𝑒 𝑡𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝑓𝑢𝑛𝑐𝑡𝑖𝑜𝑛}اﻟمﺳﺗوى ﻓﻲ وﺗمﺛلs{ 𝑠 − 𝑝𝑙𝑎𝑛𝑒}ﺻغيرة ﺑدوائر.َّوأن𝑠 𝑎, 𝑠 𝑏, … . . , 𝑠 𝑚ﻗيم وھﻲ اﻟمﻘام ﺟذور ھﻲsﺗﺟﻌل اﻟﺗﻲT( 𝑠) = ∞اﻻﻧﺗﻘال داﻟﺔ ﺑأﻗطاب ﺗﺳمﻰ وھﻲ {Poles of the transfer function}اﻟمﺳﺗوى ﻓﻲ وﺗمﺛلs −ﺑﻌالمﺔ𝑋. :ﺣيث ≡ 𝑚األﻗطاب ﻋدد ≡ n.األﺻفار ﻋدد ≡ 𝑚 − 𝑛 → (3.5)اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ 3.1.3ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل ﻟرﺳم اﻟﻌامﺔ اﻻﺣﻛام:(General rules for plotting root loci) 1:اﻟﺻفر من يﻘﺗرب أو اﻟﻘطب ﻋن يﺑﺗﻌد ﻋﻧدما ﻟﻠﺟذر اﻟﮭﻧدﺳﻲ اﻟمﺣل اﺗﺟاه ] { 𝑫𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒓𝒐𝒐𝒕 𝒍𝒐𝒄𝒖𝒔 𝒂𝒔 𝒊𝒕 𝒍𝒆𝒂𝒗𝒆𝒔 𝒂 𝒑𝒐𝒍𝒆 𝒐𝒓 𝒂𝒑𝒑𝒓𝒐𝒂𝒄𝒉𝒆𝒔 𝒂𝒛𝒆𝒓𝒐} 𝛿a = (δ1 + δ2 + ⋯ ) − (δb + δc + ⋯ ) ± 180° → (3.6)ﻋن اﻻﺑﺗﻌاد زاويﺔ اﻟﻘطب δ1 = (δa + δb + ⋯ ) − (δ2 + δ3 + ⋯ ) ± 180° → (3.7)من اﻻﻗﺗراب زاويﺔ .اﻟﺻفر 2:اﻟمﻘارﺑﺔ اﻟﺧطوط أﺗﺟاه أو ﻧﮭايﺔ ﻻ ما ﻓﻲ اﻟﺻفر اﺗﺟاه ]
- 139. { 𝑫𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒛𝒆𝒓𝒐 𝒂𝒕 𝒊𝒏𝒇𝒊𝒏𝒊𝒕𝒚 𝒐𝒓 𝒅𝒊𝒓𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒂𝒔𝒚𝒎𝒑𝒕𝒐𝒕𝒆𝒔} = 180 𝑚−𝑛 (1 + 2𝐿) → (3.8)اﻟﻌﻧﺻر اﺗﺟاه أو اﻟمﻘارﺑﺔ اﻟﺧطوط اﺗﺟاهاﻟالﻧﮭائﻲ 3اﻟﺣﻘيﻘﻲ اﻟمﺣور مﻊ اﻟمﻘارﺑﺔ اﻟﺧطوط ﺗﻘاطﻊ ]: { 𝑰𝒏𝒕𝒆𝒓𝒔𝒆𝒄𝒕𝒊𝒐𝒏 𝒐𝒇 𝒂𝒔𝒚𝒎𝒑𝒕𝒐𝒕𝒆𝒔 𝒘𝒊𝒕𝒉 𝒕𝒉𝒆 𝒓𝒆𝒂𝒍 𝒂𝒙𝒊𝒔} 𝛼̅ = (1 × αa + 1 × αb + ⋯ ) − (1 × α1 + 1 × α2 + ⋯ ) m − n → (3.9) 4:اﻟﺳرج ﻧﻘطﺔ ﻋﻧد ]( 𝑆𝑎𝑑𝑑𝑙𝑒 𝑝𝑜𝑖𝑛𝑡) dF(s) ds = 0 → ( 3.10 ) 5اﻟﺧطوط ﺗﻘاطﻊ ]اﻟﺗﺧيﻠﻲ اﻟمﺣور مﻊ اﻟمﺗﻘارﺑﺔ: : { 𝑷𝒐𝒊𝒏𝒕 𝒘𝒉𝒆𝒓𝒆 𝒕𝒉𝒆 𝒃𝒓𝒂𝒏𝒄𝒉𝒆𝒔 𝒊𝒏𝒕𝒆𝒓𝒆𝒔𝒆𝒄𝒕 𝒘𝒊𝒕𝒉 𝒕𝒉𝒆 𝒊𝒎𝒂𝒈𝒊𝒏𝒂𝒓𝒚 𝒂𝒙𝒊𝒔} الخاصية معادلة تستخدم، 1 + 𝐺( 𝑠) = 0 → (3.11) ﺑاﺳﺗﺑدال𝑗𝜔 ﺑـ 𝑠اﻟمﻌادﻟﺔ ﻟﺗﺻﺑح1 + 𝐺( 𝑗𝜔) 6واألﺻفار األﻗطاب ﺗرﺗيب ]:ھﻧاﻟك ﻓإن اﻟﺣﻘيﻘﻲ اﻟمﺣور ﻋﻠﻰ وأﻗطاب أﺻفار ھﻧاﻟك ﻛان إذا أﻗﺻﻰ ﻓﻲ اﻟﺟذر من ﺗﺑدأ ﺗفرﻋات.اﻟيمين ( رﻗم اﻟﺷﻛل3.2ﺗرﺗيب ﻛيفيﺔ ح ُِّوضي أدﻧاه ).اﻟﺣﻘيﻘﻲ اﻟمﺣور ﻋﻠﻰ واألﺻفار األﻗطاب 𝑠 اﻟمﺳﺗوى ( 𝑠 − 𝑝𝑙𝑎𝑛𝑒) ( رقم الشكل3.2المحور علﻰ واﻷصﻔار اﻷقطاب ترتيب ).الحقيقي 3.2:مﺣﻠوﻟﺔ أمﺛﻠﺔ 1ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط ارﺳم أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال داﻟﺔ من ]اﺳﺗﻘرار من وﺗﺣﻘق اﻟﺛاﺑت ﻗيمﺔ وأوﺟد اﻟمﻧظومﺔ𝐴. 𝐺( 𝑠) = 𝐴 (1 + 2𝑠)(1 + 0.5𝑠)(1 + 0.25𝑠) :اﻟﺣل 𝐶𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑜𝑓 𝑡ℎ𝑒 ℎ𝑖𝑔ℎ𝑒𝑠𝑡 𝑜𝑟𝑑𝑒𝑟 𝑜𝑓 𝑠ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑠
- 140. 𝐺( 𝑠) = 𝐾𝐹( 𝑠) 𝐾 = 𝐴 0.25 = 4𝐴 𝐹( 𝑠) = 1 ( 𝑠 + 0.5)( 𝑠 + 2)( 𝑠 + 4) اﻟمﺳﺗوى ح ُِّوضي أدﻧاه اﻟﺷﻛلs:اﻟﻘطﺑيﺔ اﻟﺟذور ومواضﻊ اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ،( 𝑚 − 𝑛): 𝑚 − 𝑛 = 3 − 0 = 3 ھﻧاﻟك أن يﻌﻧﻲ ھذا3.ﻧﮭايﺔ ﻻ ما ﻓﻲ أﺻفار ∗:المقاربة الخطوط اتجاه أو نهاية ال ما في الصﻔر اتجاه = 180 𝑚−𝑛 (1 + 2𝐿)اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه أو اﻟالﻧﮭائﻲ اﻟﺻفر اﺗﺟاه = 180 3−0 (1 + 2L) = 60(1 + 2𝐿)اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه أو اﻟالﻧﮭائﻲ اﻟﺻفر اﺗﺟاه = 180 3 = 60°اﻟﺧط اﺗﺟاهاﻟمﺗﻘارب،𝑎𝑡 𝐿 = 0 = 180 3 × 3 = 180°اﻟﺧط اﺗﺟاهاﻟمﺗﻘارب،𝑎𝑡 𝐿 = 1 = 180 3 × 5 = 300°اﻟﺧط اﺗﺟاهاﻟمﺗﻘارب،𝑎𝑡 𝐿 = 2 ∗اﻟمﻘارﺑﺔ اﻟﺧطوط ﺗﻘاطﻊ:اﻟﺣﻘيﻘﻲ اﻟمﺣور مﻊ 𝛼̅ = (1 × αa + 1 × αb + 1 × αc + ⋯ ) − (1 × α1 + 1 × α2 + ⋯ ) m − n 𝛼̅ = (1 × −0.5 + 1 × −2 + 1 × −4) − 0 3 = −2.167 أن ﺑما𝛼̅.مﺳﺗﻘرة ﺗﻌﺗﺑر ﻓاﻟمﻧظومﺔ ﺳاﻟﺑﺔ ﻗيمﺗﮭا
- 141. ∗اﻟﺳرﺟيﺔ اﻟﻧﻘطﺔ ﻋﻧد 𝑑𝐹( 𝑠) ds = 0 𝐹( 𝑠) = 1 ( 𝑠 + 0.5)( 𝑠 + 2)( 𝑠 + 4) ∴ 𝐹( 𝑠) = 1 𝑠3 + 6.5𝑠2 + 11𝑠 + 4 ∴ dF(s) ds = (s3 + 6.5s2 + 11s + 4) × 0 − 1(3s2 + 13s + 11) ( 𝑠3 + 6.5𝑠2 + 11𝑠 + 4) = 0 3𝑠2 + 13𝑠 + 11 = 0 𝑠 = −𝑏 ± √𝑏2 − 4𝑎𝑐 2𝑎 ∴ 𝑠 = −13 ± √132 − 4 × 3 × 11 2 × 3 = −13 ± 6.083 6 أما𝑆 = −1.153 )(مرﻓوضﺔ أو𝑠 = −3.1805 ∗التخيلي المحور مﻊ المقاربة الخطوط تقاطﻊ: 1 + 𝐺( 𝑠) = 0،َّزةياﻟمم اﻟمﻌادﻟﺔ 𝐺( 𝑆) = 𝐾𝐹( 𝑆) = 4𝐴 𝑆3 + 6.5𝑆2 + 11𝑆 + 4 1 + 𝐺( 𝑆) = 1 + 4𝐴 𝑆3 + 6.5𝑆2 + 11𝑆 + 4 = 𝑆3 + 6.5𝑆2 + 11𝑆 + 4 + 4𝐴 𝑆3 + 6.5𝑆2 + 11𝑆 + 4 = 0 ∴ 𝑆3 + 6.5𝑆2 + 11𝑆 + 4 = 0 ﺑاﺳﺗﺑدال𝑗𝜔 ﺑـ 𝑠 1 + 𝐺( 𝑗𝜔) = −𝑗𝜔3 − 6.5𝜔2 + 11𝑗𝜔 + 4 + 4𝐴 = 0 :ليةُيالتخ المكونات معادلة بأخذ −𝑗𝜔3 + 11𝑗𝜔 = 0 −𝑗𝜔3 = −11𝑗𝜔 ∴ 𝜔2 = 11 ∴ ω = ±√11 الحقيقية المكونات وبأخذ: −6.5𝜔2 + 4 + 4𝐴 = 0 −6.5 × 11 + 4 + 4𝐴 = 0
- 142. −67.5 + 4𝐴 = 0 ∴ 4𝐴 = 67.5 ∴ 𝐴 = 67.5 4 = 16.875 2داﻟﺔ من ]اﺳﺗﻘرار من وﺗﺣﻘق ﻟﻠﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط أرﺳم أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال ﻗيمﺔ وأوﺟد اﻟﻧظام اﺳﺗﻘرار ﻋدم أو𝐴.اﻟﺣدي ﻟالﺳﺗﻘرار 𝐺( 𝑆) = 𝐴 (3𝑆 + 2)( 𝑆2 + 4𝑆 + 8) 𝐺( 𝑆) = 𝐾𝐹( 𝑆) ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆 𝐾 = 𝐴 3 𝐹( 𝑆) = 1 (𝑆 + 2 3 ) ( 𝑆2 + 4𝑆 + 8) ( للمعادلة𝑺 𝟐 + 𝟒𝑺 + 𝟖)،كاآلتي الجذور حساب يتم: 𝑆 = −𝑏 ± √𝑏2 − 4𝑎𝑐 2𝑎 = −4 ± √16 − 4 × 1 × 8 2 = 4 ± √−16 2 = −4 ± 𝑗4 2 = −2 ± 𝑗2 𝐹( 𝑆) = 1 (𝑆 + 2 3 ) ( 𝑆 + 2 − 𝑗2)( 𝑆 + 2 + 𝑗2) 𝑆𝑐 = −2 − 𝑗2 ، 𝑆 𝑏 = −2 + 𝑗2 ، 𝑆 𝑎 = − 2 3 اﻟمﺳﺗوى يوضح أدﻧاه اﻟﺷﻛلsﺗغادر ﻋﻧدما واﺗﺟاھاﺗﮭا اﻟﻘطﺑيﺔ اﻟﺟذور مواضﻊ ﻋﻠﻰ يﺣﺗوي اﻟذي اﻟالﻧﮭائيﺔ اﻟﺻفريﺔ اﻟﺟذور ﻟﺗالﻗﻲ.
- 143. ∗االنتقال دالة رتبة: 𝑚 − 𝑛 = 3 − 0 = 3اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ ھﻧاﻟك أن يﻌﻧﻲ ھذا3ﻧﮭايﺔ ﻻ ما ﻓﻲ أﺻفار ∗المقاربة الخطوط تجاه أو نهاية ال ما في الصﻔر اتجاه: = 180 𝑚−𝑛 (1 + 2𝐿) = 180 3 (1 + 2𝐿) = 60(1 + 2𝐿)اﻟالﻧﮭائﻲ ﻟﺻفر اﺗﺟاه = 60°اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه،𝑎𝑡 𝐿 = 0 = 180°اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه،𝑎𝑡 𝐿 = 1 = 300°اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه،𝑎𝑡 𝐿 = 2 ∗المقاربة الخطوط تقاطﻊ:الحقيقي المحور مﻊ 𝛼̅ = (1 × αa + 1 × αb + 1 × αc) − (1 × α1 + 1 × α2 + ⋯ ) m − n 𝛼̅ = (1 × αa + 1 × αb + 1 × αc) m − n ∴ 𝛼̅ = (1 × −2 3 + 1 × −2 + 1 × −2) 3 = −1.56 أن ﺑما𝛼̅ﺳاﻟﺑﺔ ﻗيمﺗﮭا،.مﺳﺗﻘرة ﺗﻌﺗﺑر ﻓاﻟمﻧظومﺔ ∗:التخيلي المحور مﻊ المقاربة الخطوط تقاطﻊ 1 + 𝐺( 𝑠) = 0اﻟمميزة اﻟمﻌادﻟﺔ ، 𝐺( 𝑆) = 𝐾𝐹( 𝑆) = 𝐴 (3s + 2)( 𝑠2 + 4𝑠 + 8) 1 + 𝐺( 𝑆) = 1 + 𝐴 3𝑆3 + 14𝑆2 + 32𝑆 + 16 1 + 𝐺( 𝑆) = 3𝑆3 + 14𝑆2 + 32𝑆 + 16 + 𝐴 3𝑆3 + 14𝑆2 + 32𝑆 + 16 = 0 ∴ 1 + 𝐺( 𝑆) = 3𝑆3 + 14𝑆2 + 32𝑆 + 16 + 𝐴 = 0 باستبدال𝒋𝝎 ﺑــ 𝒔: −3𝑗𝜔3 − 14𝜔2 + 32𝑗𝜔 + 16 + 𝐴 = 0 :التخيلية المكونات معادلة بأخذ −3𝑗𝜔3 − 32𝑗𝜔 = 0 −3𝑗𝜔3 = −32𝑗𝜔
- 144. ∴ 𝜔2 = 32 3 ∴ ω = ±√ 32 3 ∗الصﻔر من يقترب أو القطب عن يبتعد عندما للجذور الهندسي المحل اتجاه: b δ b = ( 𝑏 𝛿 1 + b δ 2 + ⋯ ) − ( b δ a + b δ c + ⋯ ) ± 180 b δ a = 180 − tan−1 2 1.33 = 180° − 56.4 = 123.6° b δ c = 90° ∴ b δ b = −(123.6 + 90) ± 180 = −33.6° 𝑜𝑟 − 393.6° َّﻓإن مﺗماﺛل اﻟﮭﻧدﺳﻲ اﻟمﺣل أن وﺑما، c δ 𝑐 = − b δ b = 33.6° قيمة إليجاد𝑨:بأخذالحقيقية المكونات معادلة: −14𝜔2 + 16 + 𝐴 = 0 −14 × 32 3 + 16 + 𝐴 = 0 ∴ 𝐴 = 14 × 32 3 − 16 = 149.3 − 16 = 133.3 3اﻟﮭﻧدﺳﻲ اﻟمﺣل مﺧطط وأرﺳم اﻟﻧظام اﺳﺗﻘرار من ﺗﺣﻘق أدﻧاه األمامﻲ اﻟمﺳار اﻧﺗﻘال داﻟﺔ من ] .ﻟﻠﺟذور 𝐺( 𝑆) = 𝐴( 𝑆2 + 2𝑆 + 2) (3𝑆 + 2)( 𝑆2 + 4𝑆 + 8) :اﻟﺣل 𝐺( 𝑆) = 𝐾𝐹( 𝑆) ﻟـ اﻟﻌﻠيا اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆 𝐾 = 𝐴 3 𝐹( 𝑆) = 𝑆2 + 2𝑆 + 2 (𝑆 + 2 3 ) ( 𝑆2 + 4𝑆 + 8)
- 145. ( اﻟمﻌادﻟﺔ ﺟذور ﻹيﺟاد𝑆2 + 2𝑆 + 2أدﻧاه اﻟمﻌادﻟﺔ اﺳﺗﺧدام يمﻛن ): 𝑆 = −𝑏 ± √𝑏2 − 4𝑎𝑐 2𝑎 = −2 ± √4 − 4 × 1 × 2 2 = −2 ± √−4 2 = −2 ± 𝑗2 2 = −1 ± 𝑗1 ( اﻟمﻌادﻟﺔ ﺟذور وﻹيﺟاد𝑆2 + 4𝑆 + 8أدﻧاه اﻟمﻌاﻟﺔ اﺳﺗﺧدام يﺗم ): 𝑆 = −4 ± √16 − 4 × 1 × 8 2 = −4 ± √−16 2 = −4 ± 𝑗4 2 = −2 ± 𝑗2 ∴ 𝐹( 𝑆) = ( 𝑠 + 1 − 𝑗)( 𝑠 + 1 + 𝑗) (𝑆 + 2 3 ) ( 𝑆 + 2 − 𝑗2)( 𝑆 + 2 + 𝑗2) ∗االنتقال دالة رتبة: 𝑚 − 𝑛 = 3 − 2 = 1،اﻟﺗﺣويل أو اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ ﺻفر ھﻧاﻟك أن يﻌﻧﻲ ھذا1ﻧﮭايﺔ ﻻ ما ﻓﻲ. ∗المقاربة الخطوط تجاه أو نهائي الال الصﻔر اتجاه: = 180 𝑚−𝑛 (1 + 2𝐿) = 180 3−2 (1 + 2𝐿) = 180(1 + 2𝐿)الصﻔر اتجاهاتجاه أو الالنهائي المتقارب الخط = 180°اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه،𝑎𝑡 𝐿 = 0 اﻟمﺳﺗوى ﻋﻠﻰ واﻟﺻفريﺔ اﻟﻘطﺑيﺔ اﻟﺟذور مواضﻊ يوضح أدﻧاه اﻟﺷﻛلsاﺗﺟاه يوضح ًاوأيض اﻟﺻفر من ﺗﻘﺗرب أو اﻟﻘطب ﻋن ﺗﺑﺗﻌد ﻋﻧدما ﻟﻠﺟذور اﻟﮭﻧدﺳيﺔ اﻟمﺣال.
- 146. المقاربة الخطوط تقاطﻊمﻊ:الحقيقي المحور 𝛼̅ = (1 × αa + 1 × αb + 1 × αc) − (1 × α1 + 1 × α2 + ⋯ ) m − n 𝛼̅ = (1 × −2 3 + 1 × −2 + 1 × −2) − (1 × −1 + 1 × −1) 3 − 2 = −2.67 أن ﺑما𝛼̅ﺳاﻟﺑﺔ ﻗيمﺗﮭا،.مﺳﺗﻘرة ﺗﻌﺗﺑر ﻓاﻟمﻧظومﺔ االقتراب أو القطب من المغادرة زوايا:الصﻔر إلﻰ b δ b = ( 𝑏 δ 1 + b δ 2 + ⋯ ) − ( b δ a + δ + ⋯ ) ± 180،اﻟﻘطب ﻋن اﻻﺑﺗﻌاد زاويﺔ b δ 1 = 180 − tan−1 1 = 180° − 45 = 135° b δ 2 = 180 − tan−1 3 = 180° − 71.6 = 108.4° b δ a = 180 − tan−1 2 1.333 = 180° − 56.3 = 123.7. ° b δ c = 90° ∴ b δ b = (135 + 108.4) − (123.7 + 90) ± 180° = −29.7 ± 180° = 209.7 𝑜𝑟 − 150.3° 1 δ 1 = ( 1 𝛿 𝑎 + 1 δ b + 1 δ c ) − ( 1 𝛿 2 ) ± 180،اﻟﺻفر من اﻻﻗﺗراب زاويﺔ 1 δ a = 180 − tan−1 1 1 3⁄ = 180° − 71.6 = 108.4° 1 δ b = 180 − tan−1 1 1 = 180° − 45 = 135° 1 δ c = 180 − tan−1 3 1 = 71.6°
- 147. 1 δ 2 = 90° ∴ 1 δ 1 = (108.4 + 135 + 71.6) − (90) ± 180° = 225 ± 180° = 405 𝑜𝑟 45° الهندسي المحل أن بماَّفإن متماثل: 𝑐 δ c = − b δ b = −209.7 أو 150.3 2 δ 2 = − 1 δ 1 = −405° أو − 45° ، ًاوأيض 3.3اﻟﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق راوث أﺳﻠوب{ 𝑹𝒐𝒖𝒕𝒉 𝒔𝒕𝒂𝒃𝒊𝒍𝒊𝒕𝒚 𝒄𝒓𝒊𝒕𝒆𝒓𝒊𝒐𝒏} ( راوث اﺳﺗﻧﺑطRouthاﻟمﻌادﻟﺔ ﺑاﺳﺗﺧدام وذﻟك اﻟﺗﺣﻛم ﻧظم اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق ًامﺑﺗﻛر ًاأﺳﻠوﺑ ) ﻟﻠﻧظام اﻟمميزة{1 + 𝐺( 𝑠) = 0}مﺻفوﻓﺔ ﺷﻛل ﻓﻲ ووضﻌﮭاوﺗرﺗيﺑﮭا مﺣدداﺗﮭا إيﺟاد وﺑاﻟﺗاﻟﻲ ﻟﻠمﺻفوﻓﺔ األول اﻟﻌمود ﻓﻲ.اﻟموﺟودة اﻟﻌﻧاﺻر مراﻗﺑﺔ يﺗم ﻻ أم مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا ما ﻟمﻌرﻓﺔ األول اﻟﻌمود ﻓﻲ،وإﻻ مﺳﺗﻘرة اﻟمﻧظومﺔ ﻓﺗﻌﺗﺑر مﺗغيرة ﻏير ﻟﻠﻌﻧاﺻر اﻟﺟﺑريﺔ اﻹﺷارة ﻛاﻧت ﻓإذا .مﺳﺗﻘرة ﻏير ﺳﺗﻌﺗﺑر ﻓإﻧﮭا اﻟﺗاﻟيﺔ األمﺛﻠﺔ ﺧالل من وأﺣﻛامه راوث أﺳﻠوب ﺷرح ﺳيﺗم.مﻘارﻧﺔ ﺳيﺗم ًاأيضراوث أﺳﻠوب ﺑأﺳﻠوب.اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟﺟذور اﻟﮭﻧدﺳﻲ اﻟمﺣل 3.4][أ مﺣﻠوﻟﺔ أمﺛﻠﺔ: 1األمامﻲ مﺳارھا داﻟﺔ اﻟﺗﻲ اﻟمرﺗدة اﻟﺗغذيﺔ وﺣدة ذات اﻟﺗﺣﻛم ﻟمﻧظومﺔ اﻟﮭﻧدﺳﻲ اﻟمﺣل أرﺳم ] :ﻛاآلﺗﻲ 𝐺( 𝑆) = 𝐴( 𝑆 + 1) 𝑆2( 𝑆 + 2) راوث طريﻘﺔ ﺟرب ًاأيض{ 𝑅𝑜𝑢𝑡ℎ}اﻟﻧظام اﺳﺗﻘرار من ﻟﻠﺗﺣﻘق. :اﻟﺣل 𝐺( 𝑆) = 𝐾𝐹( 𝑆) ﻟـ اﻟرﺗﺑﺔ مﻌامل𝐾 = 𝑆 𝐹( 𝑆) = ( 𝑆 + 1) 𝑆 × 𝑆( 𝑆 + 2)
- 148. اﻟﺣﻘيﻘﻲ اﻟمﺣور ﻋﻠﻰ اﻟﻘطﺑيﺔ اﻟﺟذور ﺗوزيﻊ يوضح أدﻧاه اﻟﺷﻛل. ∗)الالنهائية اﻷصﻔار عدد أو المقاربة خطوط (عند االنتقال دالة رتبة: 𝑚 − 𝑛 = 2،اﻻﻧﺗﻘال داﻟﺔ رﺗﺑﺔ ﻻ ﻓيما ﺻفران ﻧاﻟك أن يﻌﻧﻲ ھذاﻧﮭايﺔ. ∗المقاربة الخطوط اتجاه أو الالنهائي الصﻔر اتجاه: = 180 𝑚−𝑛 (1 + 2𝐿) = 180 3−2 (1 + 2𝐿) = 90(1 + 2𝐿)اﻟالﻧﮭائﻲ اﻟﺻفر اﺗﺟاه = 90°اﻟمﺗﻘارب اﻟﺧط اﺗﺟاه𝑎𝑡 𝐿 = 0 = 270°اﻟمﻘارب اﻟﺧط اﺗﺟاه𝑎𝑡 𝐿 = 1 ∗المقاربة الخطوط تقاطﻊ:الحقيقي المحور مﻊ 𝛼̅ = (1 × αa + 1 × αb + 1 × αc) − (1 × α1) m − n ∴ 𝛼̅ = (1 × 0 + 1 × 0 + 1 × −2) − (1 × −1) 2 = −2 + 1 2 = −0.5 أن ﺑما𝛼̅.مﺳﺗﻘرة ﺗﻌﺗﺑر ﻓاﻟمﻧظومﺔ ﺳاﻟﺑﺔ ﻗيمﺗﮭا المنظومة استقرار من للتحقق راوث طريقة استخدام: الخاصية معادلة{ 𝑪𝒉𝒂𝒓𝒂𝒄𝒕𝒆𝒓𝒊𝒔𝒕𝒊𝒄 𝒆𝒒𝒖𝒂𝒕𝒊𝒐𝒏}: 1 + 𝐺( 𝑆) = 0 𝐺( 𝑠) = 𝐴( 𝑆 + 1) 𝑆2( 𝑆 + 2) = 𝐴𝑆 + 𝐴 𝑆3 + 2𝑆2 ∴ 1 + 𝐺( 𝑆) = 1 + 𝐴𝑆 + 𝐴 𝑆3 + 2𝑆2 = 0 S3 + 2S2 + AS + A = 0
- 149. 0A1𝑆3 0A2𝑆2 002A − A 2 = 𝐴 2 𝑆1 00A2 2 − 0 A 2⁄ = 𝐴 𝑆0 مﺳﺗﻘرة ﺗﻌﺗﺑر اﻟمﻧظومﺔ ﻓإن مﺗغيرة ﻏير األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟﻌﻧاﺻر اﺷارة ان وﺑما. ﻟالﺳﺗﻘراريﺔَّﻓإن اﻟﺣديﺔ∴ 𝐴 > 0 ، 𝐴 2 > 0،َّأن ﺑمﻌﻧﻰ𝐴اﻟﺻفر من أﻛﺑر ﺗﻛون. 2األمامﻲ اﻟمﺳار داﻟﺔ ]𝐺( 𝑆)ﻛاآلﺗﻲ ﻋﻧﮭا اﻟﺗﻌﺑير يمﻛن ﺗﺣﻛم ﻟمﻧظومﺔ: 𝐺( 𝑆) = 2100𝑆 + 101 3200𝑆2(10𝑆 + 1) مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا ما ﻟﺗﺣديد آﺧر اﺳﻠوب أي أو راوث اﺳﻠوب اﺳﺗﺧدم؟ ﻻ أم :اﻟﺣل الخاصية معادلة: 1 + 𝐺( 𝑆) = 0 1 + 1 + 2100𝑆 + 101 3200𝑆3 + 3200𝑆2 = 0 3200𝑆3 + 3200𝑆2 + 2100𝑆 + 101 = 0 0210032000𝑆3 01013200𝑆2 003200 × 2100 − 32000 × 101 3200 = 1090 𝑆1 001090 × 101 − 0 1090 = 101 𝑆0 مﻧظومﺔ ﺗﻌﺗﺑر اﻟمﻧظومﺔ ھذه ﻓان ﺗﺗغير ﻟم األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟمﻌامالت إﺷارة أن وﺑما .مﺳﺗﻘرة 3ﻟﻠداﻟﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ من ]ما ِّدﺣد اآلﺗيﺔذﻟك ﻏير أم مﺳﺗﻘرة اﻟمﻧظومﺔ ﻛاﻧت إذا. S4 + 3S3 + S2 + 6𝑆 + 2 = 0
- 150. :اﻟﺣل 0211𝑆4 0063𝑆3 002−1𝑆2 00012𝑆1 0002𝑆0 اﺷارة أن ﺑمااﻟموﺟودة اﻟمﻌامالتإﻟﻰ ﺛم اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من ﺗغيرت األول اﻟﻌمود ﻓﻲ ﻏير ﺗﻌﺗﺑر اﻟمﻧظومﺔ ﻓإن أﺧرى مرة اﻟموﺟب.مﺳﺗﻘرة 3.5راوث ألﺳﻠوب اﻟﻌامﺔ األﺣﻛام ﺑﻌض: :( 𝐆𝐞𝐧𝐞𝐫𝐚𝐥 𝐑𝐮𝐥𝐞𝐬 𝐨𝐟 𝐑𝐨𝐮𝐭𝐡 𝐒𝐭𝐚𝐛𝐢𝐥𝐢𝐭𝐲 𝐂𝐫𝐢𝐭𝐞𝐫𝐢𝐨𝐧) 1اﻟمﻌامالت اﺷارة ﻓﻲ اﻟﺗغيرات ﻋدد أن راوث ﻗاﻧون يﻘول ]األول اﻟﻌمود ﻓﻲيﺳاوي ﻟﻠمﺻفوﻓﺔ اﻟﺧاﺻيﺔ ﻟداﻟﺔ ﺟذور ﻋدداﻟمﺣور يمين ﻋﻠﻰ اﻟواﻗﻌﺔ.اﻟﺗﺧيﻠﻲ اﻹﺷارة ﻓﻲ ﺗغيران ھﻧاﻟك اﻟﺳاﺑق اﻟمﺛال ﻓﻲاﻟموﺟب إﻟﻰ اﻟﺳاﻟب من ﺛم اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من .اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺟذرين ﻓﮭﻧاﻟك وﻋﻠيه 2ھو األول اﻟﻌمود ﻓﻲ اﻟمﻌامالت ﻋدد ]𝑛 + 1ﺣيث𝑛اﻟﺧاﺻيﺔ داﻟﺔ رﺗﺑﺔ ھﻲ. 3ﻓمﻌادﻟﺔ ﺻفر ھو األﺧير اﻟﺻف مﻌامل ﻛان إذا ]اﻟﺧاﺻيﺔ.األﺻل ﻋﻧد ﺟذر ﻟديﮭا 4األﺻل ﻋﻧد مزدوج ﺟذر ﻟديﮭا اﻟﺧاﺻيﺔ ﻓمﻌادﻟﺔ ﺻفر ھو األﺧيرين اﻟﺻفين مﻌامل ﻛان إذا ]. 5ﺻفر ھو األول اﻟﻌمود مﻌامالت أﺣد ﻛان إذا ]،ﺻغير ﺑرﻗم اﺳﺗﺑداﻟه ﻓيمﻛنًاﺟد∈ﺑغرض :ﻟذﻟك وﻛمﺛال اﻟمﺻفوﻓﺔ ﻓﻲ اﻟمﺗﺑﻘيﺔ اﻟمﻌامالت ﺣﺳاب S5 + 2S4 + 4S3 + 8S2 + 10S + 6 = 0 01041S5 0682𝑆4 0070 ≈∈𝑆3 006 − 14 ∈ 𝑆2 0007𝑆1 0006𝑆0 ومن اﻟﺳاﻟب إﻟﻰ اﻟموﺟب من مرﺗين ﺗغيرت األول اﻟﻌمود ﻓﻲ اﻟموﺟودة اﻟمﻌامالت إﺷارة أن ﺑما .اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺟذرين ﻟديﮭا ﺳيﻛون اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻓإن اﻟموﺟب إﻟﻰ اﻟﺳاﻟب 6ﺻفوف أﺣد ﻓإن األﺻل ﻧﻘطﺔ ﺣول ﺑﺗماﺛل ﻋﺔ َّموز اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺟذور ﺑﻌض ﻛاﻧت إذا ] اﻟﺻفر ﻋﻠﻰ ﺟميﻌﮭا ﺳﺗﺣﺗوي راوث مﺻفوﻓﺔ.اﻟوضﻊ ھذا ويﺣدثمﻌادﻟﺔ ﺗمﺗﻠك ﻋﻧدمااﻟﺧاﺻيﺔ
- 151. مﻌﻛوﺳﺔ ﺑإﺷارات اﻟﺣﻘيﻘيﺔ اﻟﺟذور من زوج(±α)،ﺑإﺷارة اﻟمﻌﻘدة اﻟمراﻓﻘﺔ اﻟﺟذور من زوج أو مﻌﻛوﺳﺔ(±jω)ﺑ أوواﻟمﻌﻘدة اﻟﺣﻘيﻘيﺔ اﻟﺟذور من د ِّﺣَّﺗُم زوج(−α ± 𝑗𝜔 ، 𝛼 ± 𝑗𝜔). اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﻟذﻟك مﺛال: S6 + 6S5 + 10S4 + 12S3 + 13S2 − 18𝑆 − 24 = 0 :راوث مصﻔوفة 0−2413101S6 00−18126S5 00−24168𝑆4 00000𝑆3 00000𝑆2 00000𝑆1 00000𝑆0 ﺻفS3 يﺣﺗويﺻفر ﻋﻠﻰ ﺟميﻌه اﻟمﺳاﻋدة اﻟمﻌادﻟﺔ{Auxiliary equation} 𝐴( 𝑆)،اﻟﺻف مﻌامالت من ﻋﻠيﮭا اﻟﺣﺻول يمﻛن .اﻟﺳاﺑق 𝐴( 𝑆) = 8𝑆4 + 16𝑆2 − 24 = 8(S4 + 2S2 − 3) = 8( 𝑆2 − 1)(S2 + 3) .اﻟرﺗﺑﺔ زوﺟيﺔ ًادائم ھﻲ اﻟمﺳاﻋدة اﻟمﻌادﻟﺔ S6 + 6S5 + 10S4 + 12S3 + 13S2 − 18𝑆 − 24 = 8( 𝑆4 − 2S2 − 3)(S2 + 6S + 8) = 0 اﻟمﻌادﻟﺔ ﺟذور( 𝑆2 − 1)( 𝑆2 + 3)ھﻲ(S4 + 2S2 − 3) اﻟﺣﻘيﻘيﺔ اﻟﺟذور من زوج:S2 = 1 ، ∴ S = ±1 اﻟﺗﺧيﻠيﺔ اﻟﺟذور من زوج:S2 = −3 ، ∴ 𝑆 = ±√−3 اﻟمﻌادﻟﺔ ﺟذور( 𝑠2 + 6𝑠 + 8)ھﻲ:S2 + 6𝑆 + 8 = ( 𝑆 + 4)( 𝑆 + 2) = 0 ∴ 𝑆 = −4، 𝑆 = −2 3.6:][ب مﺣﻠوﻟﺔ أمﺛﻠﺔ 1]هي مرتدة تغذية ذات تحكم لمنظومة الخاصية معادلة: (S + 2)(S2 + 4S + 8) + 𝐾 = 0 طريﻘﺔ اﺳﺗﺧدمﻗيم مدى ﻟﺗﺣديد راوث𝐾مﺳﺗﻘرة اﻟمﻧظومﺔ ﺗﻛون ﺣﺗﻰ. الحل:
- 152. S3 + 4S2 + 8𝑆 + 2𝑆2 + 8𝑆 + 16 + 𝐾 = 0 ﻋاﻟيﺔ اﻟمﻌادﻟﺔ ﺗرﺗيب ﺑإﻋادة، S3 + 6S2 + 16𝑆 + (16 + 𝐾) = 0 راوث مصﻔوفة: 0161𝑆3 0(16 + 𝑘)6𝑆2 0080 − K 6 𝑆1 0016 + 𝑘𝑆0 أو من أﻛﺑر يﻛون أن يﺟب األول اﻟﻌمود ﻓﻲ األﺧير ﻗﺑل اﻟﺻفر ﻓإن مﺳﺗﻘرة اﻟمﻧظومﺔ ﺗﻛون ﻟﻛﻲ ﻟﻠﻌﻧﺻر ًامﺳاوي..ﻟﻠﻌﻧﺻر ًامﺳاوي أو من أﻛﺑر األﺧير اﻟﻌﻧﺻر يﻛون أن يﺟب ًاأيض 80 − K 6 ≥ 0 → (1) 80 − K ≥ 0 −𝐾 ≥ −80 ∴ 𝐾 ≤ 80 16 + 𝐾 ≥ 0 → (2) ∴ 𝐾 = −16 −16 ≤ 𝐾 ≤ 80 ﻗيم𝐾ﺑين مﺣﺻورة ﺗﻛون80 و − 16. 2]ھﻲ ﺗﺣﻛم ﻟمﻧظومﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ: 𝑠( 𝑠2 + 8𝑠 + 𝑎) + 4( 𝑠 + 8) = 0 راوث طريﻘﺔ اﺳﺗﺧدمﻗيم مدى ﻋﻠﻰ ﻟﻠﺣﺻول𝑎.مﺳﺗﻘرة اﻟمﻧظومﺔ ﻟﺗﻛون :الحل s3 + 8𝑠2 + 𝑎𝑠 + 4𝑠 + 32 = 0 s3 + 8s2 + (a + 4) 𝑠 + 32 = 0 راوث مصﻔوفة: 0(a + 4)1𝑆3 0328𝑆2 00a𝑆1 0032𝑆0 ﻗيمﺔ𝑎ﺻفر من أﻛﺑر أو مﺳاويﺔ ﺗﻛون أن يﺟب∴ 𝑎 ≥ 0 3.7:إضاﻓيﺔ مﺳائل 1ﻟﻠمﺳﺗوى اﻟﺗﺧيﻠﻲ اﻟمﺣور يمين ﺗﻘﻊ اﻟﺗﻲ اﻟﺟذور ﻋدد ﻟﺗﺣديد راوث طريﻘﺔ اﺳﺗﺧدم ]𝑠ﻟمﻌادﻻت :اﻟﺗاﻟيﺔ اﻟﺧاﺻيﺔ
- 153. ( 𝑖)s3 + 5s2 + 6s = 0 ( 𝑖𝑖)𝑠3 + 𝑠2 − 𝑠 − 1 = 0 ( 𝑖𝑖𝑖)s3 + 2𝑠2 + 4𝑠 + 8 = 0 ( 𝑖𝑣)𝑠4 + 5𝑠3 + 6𝑠2 = 0 ( 𝑣)𝑠4 + 5𝑠3 + 5𝑠2 − 5𝑠 − 6 = 0 ( 𝑣𝑖)𝑠4 + 5𝑠3 + 7𝑠2 + 5𝑠 + 6 = 0 ( 𝑣𝑖𝑖)𝑠5 + 𝑠4 + 5𝑠3 + 5𝑠2 − 4𝑠 + 4 = 0 ( 𝑣𝑖𝑖𝑖)𝑠5 + 4𝑠4 + 6𝑠3 + 24𝑠2 + 25𝑠 + 100 = 0 اﻟﺟذور ﻋﻠﻰ ف َّﺗﻌر ًاوأيض.األﺻل ﻧﻘطﺔ ﺣول ﺑﺗماﺛل ﻋﺔ َّوزُماﻟ 2ھﻲ ﺗﺣﻛم ﻟمﻧظومﺔ اﻟﺧاﺻيﺔ مﻌادﻟﺔ ]: 𝑠( 𝑠2 + 6𝑠 + 13) + 𝑘 = 0 ﻗيم ﺣدد ]أ𝑘ﺗﺟ اﻟﺗﻲ.مﺳﺗﻘرة اﻟمﻧظومﺔ ﻌل ﻗيم ﺣدد ]ب𝑘اﻟﺟذور من زوج ﺗمﺗﻠك اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺗﺟﻌل اﻟﺗﻲاﻟمﺣور ﻋﻠﻰ اﻟمﻌﻘدة اﻟمراﻓﻘﺔ .اﻟﺗﺧيﻠﻲ ﻗيم ﺣدد ]ج𝑘اﻟﺧاﺻيﺔ مﻌادﻟﺔ ﺗﺟﻌل اﻟﺗﻲاﻟمراﻓﻘﺔ اﻟﺟذور من زوج ﺗمﺗﻠكاﻟﺣﻘيﻘﻲ ﺟزئﮭا اﻟﺗﻲ ھو−1.
- 154. والمر الكتباجع و الكتبالعربية المراجﻊ: 1-اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة،"اﻟفﻧيﺔ اﻟﻘياﺳات ﻛﺗاب "،اﻟﻌرﺑيﺔ اﻟممﻠﻛﺔ .اﻟﺳﻌوديﺔ 2-" اآلﻟﻲ اﻟﺗﺣﻛم ﺗﻘﻧيﺔ ﻛﺗاب " اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة،اﻟﻌرﺑيﺔ اﻟممﻠﻛﺔ .اﻟﺳﻌوديﺔ 3-اﻟﺗﺣﻛم ﺗﻘﻧيﺔ ﻛﺗاب " اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة" اﻟمﺑرمج،اﻟممﻠﻛﺔ .اﻟﺳﻌوديﺔ اﻟﻌرﺑيﺔ 4-" وﺧواﺻﮭا اﻟﺻﻧاﻋيﺔ اﻟﺗﺣﻛم ﻧظم " اﻟمﻧاھج وﺗطوير ﻟﺗﺻميم اﻟﻌامﺔ اﻹدارة، .اﻟﺳﻌوديﺔ اﻟﻌرﺑيﺔ اﻟممﻠﻛﺔ 5-ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ،"وﺗﺣﻛم أﺗوماﺗيﺔ مﺣاضرات "مذﻛرة،وادي ﺟامﻌﺔ اﻟﻧيل،واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1994.)م 6-ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ،"اﻟﻘياس أﺟﮭزة مﺣاضرات "مذﻛرة،وادي ﺟامﻌﺔ اﻟﻧيل،واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1993.)م 7-ﺳﻠيمان اﻟمرضﻲ مﺣمد أﺳامﺔ،"اﻟﺗﺣﻛم ھﻧدﺳﺔ مﺣاضرات "مذﻛرة،وادي ﺟامﻌﺔ اﻟﻧيل،واﻟﺗﻘﻧيﺔ اﻟﮭﻧدﺳﺔ ﻛﻠيﺔ،اﻟميﻛاﻧيﻛيﺔ اﻟﮭﻧدﺳﺔ ﻗﺳم،(1995.)م 8-ﻋﺑد اﻟﺣاج ﺟالل،"اﻟميﻛاﻧيﻛيﺔ األﻧظمﺔ ﻓﻲ اﻟﺗﺣﻛم ﻧظريﺔ "،( ﻓﺑرير2010.)م 9-"اﻟﻘياس أﺟﮭزة " ،اﻟﻠﺣياﻧﻲ ﺣميد ﺑن ﺳﻌود،اﻟﻘرى أم ﺟامﻌﺔ،اﻟﺗطﺑيﻘيﺔ اﻟﻌﻠوم ﻛﻠيﺔ، .اﻟطﺑيﺔ اﻟفيزياء ﺷﺑﻛﺔ 10-ﺻديق ھاﺷم مﺣمد،"ماﻟموائﻊ يﻛاﻧيﻛا"،ا اﻹﺻدارةﻟﺛاﻧيﺔ،(2006.)م و الكتباإلنجليزية المراجﻊ: 1- A. Aziz Bazoune , "System Dynamics and Control". 2- Bruce Francis, "Dynamic Systems and Control " ,Course Notes , January (2010). 3- Frenzel H. Grothey and et al. ,"Industrial Flow Measurement Basics and Practice " , ABB Automation Products GmbH ,(2011). 4- Gerald Recktenwald,"Temperature Measurement with a Thermistor and an Arduino" ,Class Notes, (2013).
- 155. 5- Kreider J. F. ,Curtiss P. S. ,et al. ,"Mechanical Systems Control ",Mechanical Engineering Handbook , C R C Press LLC,(1999). 6- Omri Sarig,"Introduction to the Transfer Operator Method" Sao Carlos ,October (2012). 7- P.E. Well stead, "introduction to Physical System Modeling" , Electronic Publisher (www.control system principles) ,U K , (2000). 8- Peter Grogono, "Control systems" ,December (2003). 9- Rao v. Dukkipati , " Analysis and Design of Control Systems using Mat lab" , New Age International limited Publishers , (2006). 10- Richard C. Dorf, Robert H. Bishop , "Control Systems" , Twelfth Edition, Pearson Education , (2011). 11- Robert W. Fox et al., "Introduction to Fluid Mechanics", Sixth Edition, John Wiley and Sons Publishers, (2004). 12-Salah N. Farhan,"Flow Measurement". 13-T.T. AL-Shemmeri , "Engineering Fluid Mechanics Solution Manual" , Book boon.com , (2012).
- 156. UU e-kutub.com ﻣﻜﺎﻥ ﺃﻱ ﻭﻣﻦ ،ﻭﻗﺖ ﻟﻜﻞ ،ﺍﻟﻜﺘﺐ ﺁﻻﻑ ﻭﺑﻜﺎﻟﻮﺭﻳﻮﺱ ﺩﺑﻠﻮﻡ ﻟﻄﻼﺏ ﺃﺳﺎﺳﻴﺔ ﺑﺼﻔﺔ ﻣﻮﺟﻪ ﻛﺘﺎﺏ ﻫﺬﺍ ﻗﺴﻢ ﻃﻼﺏ ﺧﺎﺻﺔ ﺍﻟﺘﺨﺼﺼﺎﺕ ﺟﻤﻴﻊ ﻓﻲ ﺍﻟﻬﻨﺪﺳﺔ ﺍﻟﻜﺜﻴﺮ ﺍﻟﻜﺘﺎﺏ ﻫﺬﺍ ﻳﺴﺘﻌﺮﺽ ﺣﻴﺚ ،ﺍﻟﻤﻴﻜﺎﻧﻴﻜﻴﺔ ﺍﻟﻬﻨﺪﺳﺔ ﻭﺑﺎﻷﺧﺺ ﺍﻟﻤﻴﻜﺎﻧﻴﻜﻴﺔ ﺍﻟﻬﻨﺪﺳﺔ ﻣﺠﺎﻝ ﻓﻲ ﺍﻟﺘﻄﺒﻴﻘﺎﺕ ﻣﻦ .ﻭﺍﻟﻴﺪﻭﻱ ﺍﻵﻟﻲ ﺍﻟﺘﺤﻜﻢ ﻭﻫﻨﺪﺳﺔ ﺍﻟﻬﻨﺪﺳﻴﺔ ﺍﻟﻘﻴﺎﺱ ﺃﺟﻬﺰﺓ ﻣﺠﺎﻝ ﻓﻲ ،ﺍﻟﻤﻌﺮﻓﺔ ﻣﻦ ﺭﻓﻴﻊ ﻣﺴﺘﻮﻯ ﻋﻠﻰ ﺟﺎﻣﻌﻲ ﻭﺍﺳﺘﺎﺫ ﻣﻬﻨﺪﺱ ﻭﻣﺆﻟﻔﻪ ﺍﻟﻤﻬﻨﺪﺳﻴﻦ ﻣﻦ ﺍﻟﻌﺸﺮﺍﺕ ﻳﺪﻳﻪ ﺑﻴﻦ ﻣﻦ ﺗﺨﺮﺝ ﺍﻟﻌﻤﻞ ﻣﺠﺎﻻﺕ ﻣﻦ ﺍﻟﻌﺪﻳﺪ ﻓﻲ ﺍﻧﺨﺮﻃﻮﺍ ﺍﻟﺬﻳﻦ .ﺑﻼﺩﻫﻢ ﻓﻲ ﺍﻟﺘﻨﻤﻴﺔ ﺧﺪﻣﺔ ﻓﻲ ﺩﻭﺭﻫﻢ ﻟﻴﺆﺩﻭﺍ