第38回 名古屋CV・PRML勉強会 「Kinect v2本の紹介とPCLの概要」
6 likes8,191 views

The document introduces the Kinect v2 sensor and the Point Cloud Library (PCL). It provides an overview of Kinect v2 specifications and features. It also introduces a Kinect v2 book, and discusses using PCL with Kinect v2 point clouds, including examples of downsampling, segmentation, and extracting point clouds. The document recommends resources for learning more about PCL and processing 3D point clouds.
![[PR] Kinect v2本の紹介とPCLの概要
Tsukasa Sugiura
@UnaNancyOwen](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-1-320.jpg)









![Basic Features
Depth
512×424@30fps
500~8000[mm]
ToF (Time of Flight)](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-11-320.jpg)

![Basic Features
BodyIndex
512×424@30fps
500~4500[mm]
6 people
Body Area : 0~5, Other Area : 255 (5 < Index)
255
0 1](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-13-320.jpg)
![Basic Features
Body
500~4500[mm]
6 people
25 joint / people (Add Tip, Thumb, Neck)
Orientation (Quaternion)
Hand Type (Right, Left),Hand State (Open, Closed, Lasso), Lean (-1.0f~1.0f)](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-14-320.jpg)















![Basic Usage Example
Source Code
main.cpp
#include "kinect2_grabber.h"
#include <pcl/visualization/pcl_visualizer.h>
typedef pcl::PointXYZRGB PointType;
int main( int argc, char* argv[] )
{
// PCL Visualizer
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(
new pcl::visualization::PCLVisualizer( "Point Cloud Viewer" ) );
// Point Cloud
pcl::PointCloud<PointType>::ConstPtr cloud;
// Retrieved Point Cloud Function
boost::mutex mutex;
boost::function<void( const pcl::PointCloud<PointType>::ConstPtr& )> function =
[&cloud, &mutex]( const pcl::PointCloud<PointType>::ConstPtr& ptr ){
boost::mutex::scoped_lock lock( mutex );
cloud = ptr;
};](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-31-320.jpg)


![Down Sampling
VoxcelGrid
#include <pcl/filters/voxel_grid.h>
// Create Object
pcl::VoxelGrid<PointType> grid;
// Setting
grid.setLeafSize( 0.01f, 0.01f, 0.01f );
// Input
grid.setInputCloud( *input );
// Processing
pcl::PointCloud<PointType>::Ptr output( new pcl::PointCloud<PointType> );
grid.filter( *output );
Point CloudをVoxcel Gridフィルターでダウンサンプルする
Voxcel Gridの間隔を0.01[m]に設定
http://pointclouds.org/documentation/tutorials/voxel_grid.php](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-34-320.jpg)

![Segmentation
SACSegmentation
#include <pcl/segmentation/sac_segmentation.h>
// Create Object
pcl::SACSegmentation<PointType> seg;
// Setting
seg.setOptimizeCoefficients( true );
seg.setModelType( pcl::SACMODEL_PLANE );
seg.setMethodType( pcl::SAC_RANSAC );
seg.setMaxIterations( 1000 );
seg.setDistanceThreshold( 0.01 );
// Input
seg.setInputCloud( *input );
// Processing
pcl::PointIndices::Ptr inliers( new pcl::PointIndices );
pcl::ModelCoefficients::Ptr coefficients( new pcl::ModelCoefficients );
seg.segment( *inliers, *coefficients );
Point Cloudから平面(SACMODEL_PLANE)を検出する
最大反復回数を1000回、距離閾値を0.01[m]に設定
http://pointclouds.org/documentation/tutorials/planar_segmentation.php](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-36-320.jpg)
![Segmentation
Draw Segmentation Result
// Drawing Detection Area
pcl::PointCloud<PointType>::Ptr output( new pcl::PointCloud<PointType> );
output = input;
for( size_t i = 0; i < inliers->indices.size(); i++ ){
int index = inliers->indices[i];
output->points[index].r = 255;
output->points[index].g = 0;
output->points[index].b = 0;
}](https://image.slidesharecdn.com/38cvprml-151016155824-lva1-app6891/85/38-CV-PRML-Kinect-v2-PCL-37-320.jpg)








第38回 名古屋CV・PRML勉強会 「Kinect v2本の紹介とPCLの概要」
- 1. [PR] Kinect v2本の紹介とPCLの概要 Tsukasa Sugiura @UnaNancyOwen
- 2. Self-Introduction Tsukasa Sugiura Microsoft MVP for Kinect for Windows @UnaNancyOwen http://UnaNancyOwen.com t.sugiura0204@gmail.com
- 3. Agenda Kinect v2の概要 Kinect v2本の紹介 Kinect v2本のプレゼント Kinect v2とPCL
- 4. Kinect for Windows v1 Sensor MULTI-ARRAY MIC MOTORIZED TILT 3D DEPTH SENSORS RGB CAMERA
- 5. Kinect for Windows v2 Sensor MULTI-ARRAY MIC 3D DEPTH SENSOR ( IR Camera + IR Emitters ) RGB CAMERA
- 6. Kinect for Windows v2 Sensor Image by iFixit IR EMITTERS IR CAMERA
- 7. Specifications Kinect for Windows v1 Kinect for Windows v2 Color 640×480 @ 30fps 1920×1080 @ 30fps Depth 320×240 @ 30fps 512×424 @ 30fps Sensor Structured Light (PrimeSense Light Coding) Time of Flight (ToF) Range of View 0.8~4.0 m 0.5~8.0 m Range of Detection 0.8~4.0 m 0.5~4.5 m Angle of View Horizontal / Vertical 57 / 43 degree 70 / 60 degree Microphone Array ◯ ◯
- 8. Specifications Kinect for Windows v1 Kinect for Windows v2 BodyIndex 6 people 6 people Body 2 people 6 people Joint 20 joint/people 25 joint/people Hand State Open / Closed Open / Closed / Lasso Gesture ☓ ◯ Face ◯ Speech / Beamforming ◯ ◯
- 9. System / Software Requirements OS * Windows 8, 8.1, Embedded 8, Embedded 8.1 (x64) CPU Intel Core i7 3.1GHz (or higher) RAM 4GB (or more) GPU * DirectX 11 supported USB * USB 3.0 (Intel or Renesas Host Controller) Compiler * Visual Studio 2012, 2013 (Supported Express) Language Native (C++), Managed (C#,VB.NET), WinRT (C#,HTML) Other Unity Pro (Add-in), Cinder, openFrameworks (wrapper)
- 10. Basic Features Color 1920×1080@30fps / 15fps (Lighting Condition) RGBA, YUV, BGRA, Bayer, YUY2
- 11. Basic Features Depth 512×424@30fps 500~8000[mm] ToF (Time of Flight)
- 12. Basic Features Infrared / LongExposureInfrared 512×424@30fps 16bit (higher 8 bits)
- 13. Basic Features BodyIndex 512×424@30fps 500~4500[mm] 6 people Body Area : 0~5, Other Area : 255 (5 < Index) 255 0 1
- 14. Basic Features Body 500~4500[mm] 6 people 25 joint / people (Add Tip, Thumb, Neck) Orientation (Quaternion) Hand Type (Right, Left),Hand State (Open, Closed, Lasso), Lean (-1.0f~1.0f)
- 15. Basic Features Audio Beamforming (+/-50 degree) Speaker Estimation Speech Recognition
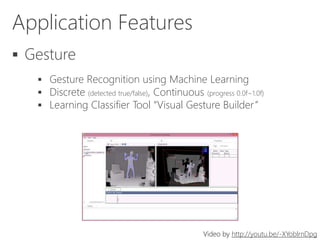
- 16. Application Features Gesture Gesture Recognition using Machine Learning Discrete (detected true/false), Continuous (progress 0.0f~1.0f) Learning Classifier Tool “Visual Gesture Builder” Video by http://youtu.be/-XYoblrnDpg
- 17. Application Features Face Bounding Box, Rotation, Points (Eye, Nose, Mouth Corner) Activity, Appearance, Expression Activity … Eye Closed, Mouth Open / Moved, Looking Away Appearance … Wearing Glasses Expression … Happy
- 18. Application Features HDFace For Creating 3D Face Model Points (1347), Triangles (2340), Hair Color, Skin Color Fitting Face Model
- 19. Application Features Other Kinect Fusion (3D Shape Reconstruction) Controls (Assist in implementation of NUI)
- 20. Kinect v2 Book Kinect for Windows SDK プログラミング Kinect for Windows v2センサー対応版 中村薫, 杉浦司, 高田智広, 上田智章 秀和システム 480ページ 3,400円+税 Publisher : http://www.shuwasystem.co.jp/products/7980html/4395.html Sample : https://github.com/K4W2-Book/K4W2-Book Reference : https://github.com/K4W2-Book/Docs
- 21. Contents Basic Streams Color, Depth, Infrared, BodyIndex, Body, Audio Application Futures Speech, Fusion, Gesture, Control, Face, HDFace
- 22. Contents NUI Tools Kinect Studio, Visual Gesture Builder, Configuration Verifier 3rdParty Library, Tools, Math., Sensing Unity, Point Cloud Library, Vector
- 23. Review Copy
- 24. Point Cloud Library About PCL(Point Cloud Library) 3次元点群のためのオープンソースのライブラリ 様々な点群処理が含まれている http://pointclouds.org/
- 25. Point Cloud Library PCL Features
- 26. Point Cloud Library PCL All-in-one Installer ビルド済みのPCLと依存ライブラリを一括でインストールする ただし、公式サイトでは旧い開発環境向けのパッケージしか配布していない (PCL 1.6.0 All-in-one Installer MSVC 2008/2010) Download : PCL 1.7.2 All-in-one Installer MSVC 2012/2013/2015 Self-Build PCLと依存ライブラリをビルドする Reference : Building PCL with Visual Studio
- 27. PCL All-in-one Installer Point Cloud Library PCL (1.7.2) Dependencies Library Boost (1.57.0) … C++準標準ライブラリ Eigen (3.2.4) … 行列ライブラリ FLANN (1.8.4) … 最近傍探索ライブラリ Qhull (2012.1) … 計算幾何ライブラリ VTK (6.2.0) … 可視化ライブラリ (OpenNI / OpenNI2) … RGB-Dセンサーライブラリ
- 28. PCL Grabber OpenNI/OpenNI2 オープンソースのRGB-Dセンサーライブラリ ただし、OpenNIはVisual Studio 2010までしか利用できない PCL 1.7.2からOpenNI2がサポートされた openni_grabber / openni2_grabber Kinect for Windows SDK v1/v2 Microsoft公式のKinectセンサーのソフトウェア開発キット 最新のVisual Studioで利用できる kinect_grabber / kinect2_grabber
- 29. PCL Project Create Project Visaul C++のプロジェクトを作成、プロパティシートを読み込む PCL.props CMakeでVisual C++のプロジェクトを自動生成する CMakeLists.txt
- 30. PCL Project CMake CMakeLists.txt cmake_minimum_required(VERSION 2.8 FATAL_ERROR) project(solution) find_package(PCL 1.7 REQUIRED) include_directories(${PCL_INCLUDE_DIRS}) include_directories($ENV{KINECTSDK20_DIR}/inc) link_directories(${PCL_LIBRARY_DIRS}) link_directories($ENV{KINECTSDK20_DIR}/Lib/$(PlatformTarget)) add_definitions(${PCL_DEFINITIONS}) set(HEADER kinect2_grabber.h) set(SOURCE main.cpp) add_executable(project ${HEADER} ${SOURCE}) target_link_libraries(project ${PCL_LIBRARIES}) target_link_libraries(project Kinect20.lib)
- 31. Basic Usage Example Source Code main.cpp #include "kinect2_grabber.h" #include <pcl/visualization/pcl_visualizer.h> typedef pcl::PointXYZRGB PointType; int main( int argc, char* argv[] ) { // PCL Visualizer boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer( new pcl::visualization::PCLVisualizer( "Point Cloud Viewer" ) ); // Point Cloud pcl::PointCloud<PointType>::ConstPtr cloud; // Retrieved Point Cloud Function boost::mutex mutex; boost::function<void( const pcl::PointCloud<PointType>::ConstPtr& )> function = [&cloud, &mutex]( const pcl::PointCloud<PointType>::ConstPtr& ptr ){ boost::mutex::scoped_lock lock( mutex ); cloud = ptr; };
- 32. Basic Usage Example Source Code // Kinect2Grabber pcl::Grabber* grabber = new pcl::Kinect2Grabber(); // Register Callback Function boost::signals2::connection connection = grabber->registerCallback( function ); // Start Grabber grabber->start(); while( !viewer->wasStopped() ){ // Update Viewer viewer->spinOnce(); boost::mutex::scoped_try_lock lock( mutex ); if( cloud && lock.owns_lock() ){ if( cloud->size() != 0 ){ /* Processing Point Cloud */ // Update Point Cloud if( !viewer->updatePointCloud( cloud, "cloud" ) ){ viewer->addPointCloud( cloud, "cloud" ); viewer->resetCameraViewpoint( "cloud" ); } } } }
- 33. Basic Usage Example Source Code // Stop Grabber grabber->stop(); return 0; } Kinect2Grabber Supported Point Types pcl::PointXYZRGB … 3次元位置(XYZ)と色(RGB) pcl::PointXYZ … 3次元位置(XYZ)
- 34. Down Sampling VoxcelGrid #include <pcl/filters/voxel_grid.h> // Create Object pcl::VoxelGrid<PointType> grid; // Setting grid.setLeafSize( 0.01f, 0.01f, 0.01f ); // Input grid.setInputCloud( *input ); // Processing pcl::PointCloud<PointType>::Ptr output( new pcl::PointCloud<PointType> ); grid.filter( *output ); Point CloudをVoxcel Gridフィルターでダウンサンプルする Voxcel Gridの間隔を0.01[m]に設定 http://pointclouds.org/documentation/tutorials/voxel_grid.php
- 36. Segmentation SACSegmentation #include <pcl/segmentation/sac_segmentation.h> // Create Object pcl::SACSegmentation<PointType> seg; // Setting seg.setOptimizeCoefficients( true ); seg.setModelType( pcl::SACMODEL_PLANE ); seg.setMethodType( pcl::SAC_RANSAC ); seg.setMaxIterations( 1000 ); seg.setDistanceThreshold( 0.01 ); // Input seg.setInputCloud( *input ); // Processing pcl::PointIndices::Ptr inliers( new pcl::PointIndices ); pcl::ModelCoefficients::Ptr coefficients( new pcl::ModelCoefficients ); seg.segment( *inliers, *coefficients ); Point Cloudから平面(SACMODEL_PLANE)を検出する 最大反復回数を1000回、距離閾値を0.01[m]に設定 http://pointclouds.org/documentation/tutorials/planar_segmentation.php
- 37. Segmentation Draw Segmentation Result // Drawing Detection Area pcl::PointCloud<PointType>::Ptr output( new pcl::PointCloud<PointType> ); output = input; for( size_t i = 0; i < inliers->indices.size(); i++ ){ int index = inliers->indices[i]; output->points[index].r = 255; output->points[index].g = 0; output->points[index].b = 0; }
- 39. Extracting ExtractIndices #include <pcl/filters/extract_indices.h> // Create Object pcl::ExtractIndices<PointType> extract; // Setting extract.setIndices( inliers ); // Input extract.setInputCloud( *input ); // Processing pcl::PointCloud<PointType>::Ptr output_positive( new pcl::PointCloud<PointType> ); extract.setNegative( false ); extract.filter( *output_positive ); pcl::PointCloud<PointType>::Ptr output_negative( new pcl::PointCloud<PointType> ); Extract.setNegative( true ); extract.filter( *output_negative ); Point Cloudから検出した平面を抽出する Positiveは検出領域、Negativeは非検出領域 http://pointclouds.org/documentation/tutorials/extract_indices.php
- 42. Tips Convert ConstPtr tp Ptr // Convert pcl::PointCloud<T>::ConstPtr pcl::PointCloud<T>::Ptr pcl::PointCloud<PointType>::ConstPtr ConstPtr( new pcl::PointCloud<PointType> ); pcl::PointCloud<PointType>::Ptr Ptr; Ptr.reset( new pcl::PointCloud<PointType>( *ConstPtr ) ); Save/Load Point Cloud #include <pcl/io/pcd_io.h> // Save Point Cloud pcl::PointCloud<PointType>::Ptr cloud( new pcl::PointCloud<PointType> ); pcl::io::savePCDFileBinary( "pointcloud.pcd", *cloud ); // Load Point Cloud pcl::PointCloud<PointType>::Ptr cloud( new pcl::PointCloud<PointType> ); pcl::io::loadPCDFile( "pointcloud.pcd", *cloud );
- 44. Reference PCL Official Documentation - Tutorials Documentation - API Reference Users Forum Japanese DERiVE - PCLを触ってみよう! 第13回 名古屋CV・PRML勉強会 - PCL (Point Cloud Library) PCL Development GitHub - PointCloudLibrary/pcl (issues/pull requests)
- 45. PCL Next All-in-one Installer Point Cloud Library PCL (1.8.0) Dependencies Library Boost (1.59.0) … C++準標準ライブラリ Eigen (3.2.6) … 行列ライブラリ FLANN (1.8.4) … 最近傍探索ライブラリ Qhull (2012.1) … 計算幾何ライブラリ VTK (6.3.0) … 可視化ライブラリ OpenNI2 … RGB-Dセンサーライブラリ RealSense … Intel RealSense SDK