Redes Neuronales
Descargar como PPT, PDF4 recomendaciones2,453 vistas

Este documento presenta conceptos básicos sobre redes neuronales artificiales, incluyendo aprendizaje supervisado, función de coste, descenso de gradiente, regla delta, algoritmos de entrenamiento, factor de aprendizaje, entrenamiento secuencial y por lotes, adaptación de parámetros, tipos de neuronas, capas de neuronas, índices de parámetros y formas de alterar los parámetros. También introduce conceptos sobre redes lineales, filtros lineales con redes neuronales, capas individuales de neuronas y redes multicapas.






![Factor de aprendizaje
Se define en el intervalo: ]0, 1]
•Elevado: El algoritmo oscila y se convierte en inestable
•Bajo: Tarda en obtener el modelo
Si el error se incrementa por encima de un determinado porciento
(5%):
•No se actualizan los parámetros
•El factor de aprendizaje se reduce en un factor 0.95 (5%)
Si el error se reduce más de un determinado porciento (5%):
•Se actualizan los parámetros
•El factor de aprendizaje se incrementa en un factor 1.05 (5%)
En cualquier otro caso:
•Se actualizan los parámetros
•Se mantiene el valor del factor de aprendizaje
Dinámico o momento
∆e
0.95(∆e)
1.05(∆e)](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-7-320.jpg)


![Red lineal (III)
Pasos para el aprendizaje supervisado
[Paso 1] Definir la estructura del modelo y las condiciones iniciales
[Paso 2] Obtener los datos de entrada-salida ( x1, x2, . . .,xn; y )
[Paso 3] Aplicar el núcleo estimador
[Paso 4] Adaptar los parámetros
[Paso 5] Determinar la condición de finalización en la obtención del modelo,
si este no se cumple, repetir a partir del [Paso 2]
[Paso 6] Aplicar el criterio para validación del modelo.
Si los resultados no son los deseados, repetir a partir del [Paso 1]](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-10-320.jpg)


![Filtro lineal con RN
Se desea representar el siguiente filtro:
y = 0.5*x1-0.3*x2
En este ejemplo los parámetros son: w1= 0.5 y w2= -0.3.
Se desea determinar la salida equivalente al vector de entradas:
>>x =
[1 3
2 4
3 5
4 6]](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-13-320.jpg)
![Filtro lineal con RN (II)
Solución:
% Se define la matriz de entradas x[n,K]=x[2,4]
>> x=x'
x =
1 2 3 4
3 4 5 6
% Se define el filtro lineal (versión antigua)
>>interx1=[1 4] % Intervalo [min, max] de x1
>>interx2=[3 6] % Intervalo [min, max] de x2
>>numsal=1 % Número de salidas
>>net=newlin([interx1; interx2], numsal);
% Nueva versión (adquiere información de matrices)
>>net=newlin(x, y); % net=newlin(x, 1);](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-14-320.jpg)
![Filtro lineal con RN (III)
% Se definen los parámetros del filtro
>>net.IW{1,1}=[0.5 -0.3]
>>net.b{1}=0; % La ganancia es cero
% Se verifican los parámetros del filtro
>> net.IW{1,1}
ans =
0.5000 -0.3000
>> net.b{1}
ans =
0](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-15-320.jpg)





![Ejemplo
% Se obtienen datos de entrada-salida
>>load dryer2
>>t=[0:.08:80-.08]';
>>a=.1; b=.1; c=.1; d=.1; e=.1; f=.1;](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-21-320.jpg)











![Ejemplo (V)
% Creo matriz con unos incluidos (considerar ganancias)
[m,n]=size(x);
unos=ones(1,n);
xx=[unos ;x];
% Se une ganancia y pesos
pesos_tot=[net.b{1} net.IW{1,1}];
% Se obtiene salida filtro lineal
filtros=pesos_tot*xx;
% Se aplica función de activación
sal=logsig(filtros);
Modelo resultante](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-35-320.jpg)











![Ejemplo (II)
% Se configuran datos de entrada-salida
>> entradas=entradas(10:1001,:)';
>> salidas=salidas(10:1001,:)';
Representación: 6 – 5 – 4 – 2
% Número de capas
>> num_capas=[5 4];
% Funciones de activación
>> funcact={'tansig' 'logsig' 'purelin'};
% Se define la red
>> net=newff(entradas,salidas, num_capas, funcact,
'trainlm', 'learngdm', 'mse');
>> view(net)](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-47-320.jpg)

![Red de base radial
S1
: Número de entradas
a1
[S1
x1]: Variables de entrada
S2
: Número de variables de salida
IW21 [S2
xS1
]: Parámetros de la segunda capa
b2
[S2
x1]: Ganancias de la segunda capa
a2
[S2
x1]: Variables de salida de la red](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-49-320.jpg)
![Red de base radial(II)
R: Número de entradas
x [Rx1]: Vector de variables de entrada
S1
: Número de variables de salida de la capa 1
IW11 [S1
xR]: Parámetros
b1
[S1
x1]: Ganancias
d [S1
x1]: Distancias](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-50-320.jpg)
![Red de base radial (Programa)
% Capa I
% Vector de variables de entrada (R=5)
x=[1, 2, 3, 4, 5]';
[R,S]=size(x);
% Número de variables de salida de la primera capa
S1=3;
% Vector de parámetros debe ser de tamaño [S1xR]
IW11=rand([S1,R]);
% Ganancias de la primera capa [S1x1]
b1=rand([S1,1]);
% Se obtiene la norma euclídea
for i=1:S1
d(i,1)=sqrt(sum((x-IW11(i,:)').^2));
end
% Se aplica la función de base radial
a1=exp(-(b1.*d).^2);](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-51-320.jpg)
![Red de base radial (Programa II)
% Capa II
%Número de variables de salida de la segunda capa
S2=2;
% Vector de parámetros debe ser de tamaño [S2,S1]
LW21=rand([S2,S1]);
% Ganancias de la segunda capa [S2x1]
b2=rand([S2,1]);
% Se obtiene la salida
y=LW21*a1+b2;](https://image.slidesharecdn.com/redesneuronales2-1223901773449296-8/85/Redes-Neuronales-52-320.jpg)













Redes Neuronales
- 2. Aprendizaje supervisado Función de coste Descenso por gradiente Regla delta Algoritmo LMS o Algoritmo de Widrow y Hoff. Factor de aprendizaje
- 3. Función de coste Sistema x1 xi xn . . . . y1 yj ym . . . . Entrenamiento secuencial: Una fila adapta el parámetro Entrenamiento por lotes: Todos los datos utilizados para entrenar Época
- 4. Adaptación del parámetro Neurona Diferencial de la función de coste con respecto a la neurona Diferencial de la neurona con respecto al parámetro Número de capas Número de capas previas
- 6. Formas de alterar el parámetro - 'trainlm' (Levenberg-Marquard) - 'traingdx' (Gradiente descendente con momento y f.a. adaptativo) - 'traingdm' (Gradiente descendente con momento) - 'traingda' (Gradiente descendente con f.a. adaptativo) - 'trainbfg' (BFGS Quasi-Newton) - 'trainrp' (Resilient Backpropagation) - 'trainoss' (Secante de un paso) - 'trainscg' (Conjugado escalado) - 'traingd' (Gradiente descendente)
- 7. Factor de aprendizaje Se define en el intervalo: ]0, 1] •Elevado: El algoritmo oscila y se convierte en inestable •Bajo: Tarda en obtener el modelo Si el error se incrementa por encima de un determinado porciento (5%): •No se actualizan los parámetros •El factor de aprendizaje se reduce en un factor 0.95 (5%) Si el error se reduce más de un determinado porciento (5%): •Se actualizan los parámetros •El factor de aprendizaje se incrementa en un factor 1.05 (5%) En cualquier otro caso: •Se actualizan los parámetros •Se mantiene el valor del factor de aprendizaje Dinámico o momento ∆e 0.95(∆e) 1.05(∆e)
- 8. Red lineal (I) Núcleo estimador
- 9. Red lineal (II) Regla Delta
- 10. Red lineal (III) Pasos para el aprendizaje supervisado [Paso 1] Definir la estructura del modelo y las condiciones iniciales [Paso 2] Obtener los datos de entrada-salida ( x1, x2, . . .,xn; y ) [Paso 3] Aplicar el núcleo estimador [Paso 4] Adaptar los parámetros [Paso 5] Determinar la condición de finalización en la obtención del modelo, si este no se cumple, repetir a partir del [Paso 2] [Paso 6] Aplicar el criterio para validación del modelo. Si los resultados no son los deseados, repetir a partir del [Paso 1]
- 11. Solución de ecuaciones lineales
- 12. Matlab WEB Aplicaciones Modelos Redes Neuronales
- 13. Filtro lineal con RN Se desea representar el siguiente filtro: y = 0.5*x1-0.3*x2 En este ejemplo los parámetros son: w1= 0.5 y w2= -0.3. Se desea determinar la salida equivalente al vector de entradas: >>x = [1 3 2 4 3 5 4 6]
- 14. Filtro lineal con RN (II) Solución: % Se define la matriz de entradas x[n,K]=x[2,4] >> x=x' x = 1 2 3 4 3 4 5 6 % Se define el filtro lineal (versión antigua) >>interx1=[1 4] % Intervalo [min, max] de x1 >>interx2=[3 6] % Intervalo [min, max] de x2 >>numsal=1 % Número de salidas >>net=newlin([interx1; interx2], numsal); % Nueva versión (adquiere información de matrices) >>net=newlin(x, y); % net=newlin(x, 1);
- 15. Filtro lineal con RN (III) % Se definen los parámetros del filtro >>net.IW{1,1}=[0.5 -0.3] >>net.b{1}=0; % La ganancia es cero % Se verifican los parámetros del filtro >> net.IW{1,1} ans = 0.5000 -0.3000 >> net.b{1} ans = 0
- 16. Filtro lineal con RN (IV) % Se obtiene la salida de la red >>y=sim(net,x) y = -0.4000 -0.2000 0 0.2000 % Se comprueba >> x'*net.IW{1,1}' ans = -0.4000 -0.2000 0 0.2000
- 17. Filtros sin ganancia Planos pasan por el origen
- 18. Limitaciones de filtros sin ganancia Cuando las entradas son cero, los parámetros no se adaptan 1 Determinada clasificación: Líneas que no pasen por el origen Función AND
- 19. Filtro con ganancia Adaptar nuevo parámetro Solución lineal
- 21. Ejemplo % Se obtienen datos de entrada-salida >>load dryer2 >>t=[0:.08:80-.08]'; >>a=.1; b=.1; c=.1; d=.1; e=.1; f=.1;
- 22. Ejemplo (II) Tools Parameter Estimation…
- 23. Ejemplo (III) Método de entrenamiento y parámetros estimados
- 24. Neurona Neurona: Función no lineal, derivable, cuyo argumento es un filtro lineal con ganancia.
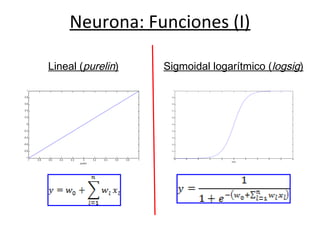
- 25. Neurona: Funciones (I) -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 purelin Lineal (purelin) -10 -8 -6 -4 -2 0 2 4 6 8 10 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 logsig Sigmoidal logarítmico (logsig)
- 26. Neurona: Funciones (II) Tangente sigmoidal hiperbólica (tansig) Limitador fuerte (hardlim) -10 -8 -6 -4 -2 0 2 4 6 8 10 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 tansig -10 -8 -6 -4 -2 0 2 4 6 8 10 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 hardlim Perceptrón
- 27. Neurona en Matlab Representación de variables nntool
- 28. Capa de Neuronas
- 29. Capa de Neuronas Función de coste Gradiente
- 30. Capa de Neuronas en Matlab
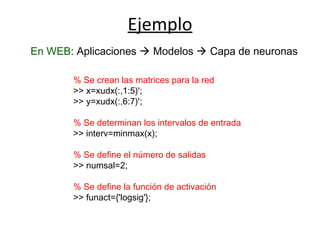
- 31. Ejemplo En WEB: Aplicaciones Modelos Capa de neuronas % Se crean las matrices para la red >> x=xudx(:,1:5)'; >> y=xudx(:,6:7)'; % Se determinan los intervalos de entrada >> interv=minmax(x); % Se define el número de salidas >> numsal=2; % Se define la función de activación >> funact={'logsig'};
- 32. Ejemplo (II) % Se define la red, entrenamiento: gradiente net=newff(interv, numsal, funact, 'traingd'); % Se verifican los parámetros de entrenamiento >> net.trainParam epochs: 100 goal: 0 lr: 0.0100 max_fail: 5 min_grad: 1.0000e-010 show: 25 time: Inf
- 33. Ejemplo (III) % Se alteran algunos parámetros >>net.trainParam.epochs = 20000; % Épocas >>net.trainParam.goal = 0.001; % Error deseado >>net.trainParam.lr = 0.1; % fa inicial % Se entrena la red, alterando parámetros % de entrenamiento según resultados >> net = train(net,x,y); % Se visualizan resultados basado en: >> ynet=sim(net,x)'; >> y=y'; % Para determinar el error >> error=y1-ynet
- 34. Ejemplo (IV) % Identificación de parámetros >> net.IW{1,1} 7.7054 -1.0928 1.3820 -0.2252 1.2570 7.9476 4.7789 -0.6219 1.0261 -0.7004 >> net.b{1} -4.4500 -3.4097
- 35. Ejemplo (V) % Creo matriz con unos incluidos (considerar ganancias) [m,n]=size(x); unos=ones(1,n); xx=[unos ;x]; % Se une ganancia y pesos pesos_tot=[net.b{1} net.IW{1,1}]; % Se obtiene salida filtro lineal filtros=pesos_tot*xx; % Se aplica función de activación sal=logsig(filtros); Modelo resultante
- 36. Red Neuronal Multicapas Se desea obtener el modelo de un sistema con 4 variables de entrada y 3 variables de salida. Posible configuración: Capa 1: Tres neuronas Capa 2: Dos neuronas Capa 3: Tres neuronas (definidas por el número de salidas del sistema) Representación: 4 – 3 – 2 – 3 donde: n : Número de variables de entrada Sc : Número de neuronas de la capa c C : Número de capas
- 37. Capa 1
- 38. Capa 2
- 39. Capa 3 C = 3
- 40. Ecuaciones generales Capa 1 Capas intermedias Para el ejemplo, representación: 4 – 3 – 2 – 3
- 41. Capas 2 y 3 Para el ejemplo, representación: 4 – 3 – 2 – 3
- 42. Aplicación del gradiente El diferencial de la función de coste con respecto a los parámetros Secuencial: Por lotes: El diferencial de la función que representa a la capa de salida con respecto a los parámetros
- 43. Aplicación del gradiente (Capa 3, C) Capa(3) Parámetro: Corresponde a la capa 3, segunda variable de entrada (segunda neurona de la capa 2), primera neurona Variable de salida Variable de entrada
- 44. Aplicación del gradiente (otras capas) Capa 1 Capa 2 Secuencial
- 45. Pasos para crear una red perceptrón multicapas 1.- Se definen el número de variables de entrada (n) y variables de salida ( ) del sistema que se pretende modelar. 2.- Se definen el número de capas (C). 3.- Se definen el número de neuronas de cada capa , para (excepto la de salida, que ha sido definida en el paso 1). 4.- Se definen las funciones de activación para cada capa (la única condición, en teoría, para definir estas funciones, es que sean derivables).
- 46. Ejemplo Planta con 6 variables de entrada y dos de salida 20 30 40 50 60 70 80 90 100 -5 -4 -3 -2 -1 0 1 2 3 10 20 30 40 50 60 70 80 90 100 -5 -4 -3 -2 -1 0 1 2 3
- 47. Ejemplo (II) % Se configuran datos de entrada-salida >> entradas=entradas(10:1001,:)'; >> salidas=salidas(10:1001,:)'; Representación: 6 – 5 – 4 – 2 % Número de capas >> num_capas=[5 4]; % Funciones de activación >> funcact={'tansig' 'logsig' 'purelin'}; % Se define la red >> net=newff(entradas,salidas, num_capas, funcact, 'trainlm', 'learngdm', 'mse'); >> view(net)
- 48. Ejemplo (III) % Se entrena la red >> train(net, entradas, salidas) % Tamaño de matrices de parámetros >> size(net.IW{1}) % Capa 1 5 6 >> size(net.LW{2,1}) % Capa 2 4 5 % Modelo resultante % Salida Capa 1 filtro1=net.IW{1}*entradas(:,1)+net.b{1}; capa1=tansig(filtro1) % Salida Capa 2 filtro2=net.LW{2,1}*capa1+net.b{2}; capa2=logsig(filtro2) % Salida Capa 3 filtro3=net.LW{3,2}*capa2+net.b{3}; capa3=purelin(filtro3)
- 49. Red de base radial S1 : Número de entradas a1 [S1 x1]: Variables de entrada S2 : Número de variables de salida IW21 [S2 xS1 ]: Parámetros de la segunda capa b2 [S2 x1]: Ganancias de la segunda capa a2 [S2 x1]: Variables de salida de la red
- 50. Red de base radial(II) R: Número de entradas x [Rx1]: Vector de variables de entrada S1 : Número de variables de salida de la capa 1 IW11 [S1 xR]: Parámetros b1 [S1 x1]: Ganancias d [S1 x1]: Distancias
- 51. Red de base radial (Programa) % Capa I % Vector de variables de entrada (R=5) x=[1, 2, 3, 4, 5]'; [R,S]=size(x); % Número de variables de salida de la primera capa S1=3; % Vector de parámetros debe ser de tamaño [S1xR] IW11=rand([S1,R]); % Ganancias de la primera capa [S1x1] b1=rand([S1,1]); % Se obtiene la norma euclídea for i=1:S1 d(i,1)=sqrt(sum((x-IW11(i,:)').^2)); end % Se aplica la función de base radial a1=exp(-(b1.*d).^2);
- 52. Red de base radial (Programa II) % Capa II %Número de variables de salida de la segunda capa S2=2; % Vector de parámetros debe ser de tamaño [S2,S1] LW21=rand([S2,S1]); % Ganancias de la segunda capa [S2x1] b2=rand([S2,1]); % Se obtiene la salida y=LW21*a1+b2;
- 53. Función no lineal equivalente i=1…R : Subíndice que representa a las R variables de entrada j=1… S1 : Subíndice que representa a las S1 salidas de la primera capa k=1.. S2 : Subíndice que representa las S2 salidas de la segunda capa Salida de la primera capa Salida de la segunda capa Función equivalente
- 54. Adaptación de parámetros Primera capa Segunda capa Gradiente descendente ó
- 55. Programa en Matlab %Se crean las matrices de entrada-salida para la red >> entrada=xudx(:,1:8)'; >> salida=xudx(:,9)'; % Se entrena la red, error medio cuadrático deseado: 0.1 >> net = newrb(entrada,salida,0.1); % Número de parámetros de la primera capa >> size(net.IW{1}) ans = 1062 8 >> size(net.b{1}) ans = 1062 1 % Número de parámetros de la segunda capa >> size(net.LW{2,1}) ans = 1 1062 >> size(net.b{2}) ans = 1 1
- 56. Resultado de aplicar la entrada a la red Clasificación de sexo de conchas (datos Avalon)
- 57. Ejemplo Planta con 6 variables de entrada y dos de salida sim('planta3'); % Datos de entrada-salida entradas=entradas(10:1001,:)'; salidas=salidas(10:1001,:)'; % Procede a adaptación net = newrb(entradas,salidas) % Comprobación del resultado salidas_net=net(entradas); plot(salidas'); hold on; plot(salidas_net')';
- 58. Ejemplo (II) >> view(net) % Comprobación de parámetros >> size(net.IW{1}) 992 6 >> size(net.b{1}) 992 1 >> size(net.LW{2,1}) 2 992 >> size(net.b{2}) 2 1
- 59. Tipos de redes - + Salida conocida y(t+1) ε(t+1) Sistema III ∆ ∆ Salida del modelo Sistema II Sistema I ∆ ∆ ∆ ∆ F Entradas conocidas Red estática Red dinámica hacia adelante Red dinámica recurrente )1( +ty
- 60. Redes estáticas vs recurrentes
- 61. Redes de Elman sim('planta_2'); % Datos de entrada-salida entradas=entradas(10:1001,:)'; salidas=salidas(10:1001,:)'; % Red de Elman net = elmannet(1:3,10) % Procede a adaptación net = train(net,entradas,salidas); view(net) % Comprobción del resultado salidas_net=net(entradas); plot(salidas'); hold on; plot(salidas_net','r')'; Planta con 6 variables de entrada y dos de salida
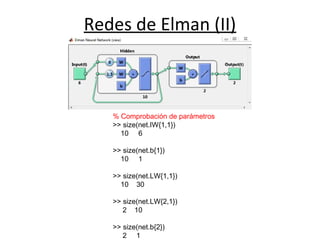
- 62. Redes de Elman (II) % Comprobación de parámetros >> size(net.IW{1,1}) 10 6 >> size(net.b{1}) 10 1 >> size(net.LW{1,1}) 10 30 >> size(net.LW{2,1}) 2 10 >> size(net.b{2}) 2 1
- 63. Redes estáticas vs dinámicas Red dinámica
- 66. …mas información