Design and development of MIL-STD-1553 based engineering model
10 likes3,295 views

The document describes a master's course project to design and develop an engineering model for electrical ground support equipment. The project involved defining requirements, choosing hardware and software, implementing a modular software architecture, and demonstrating functionality. Key aspects included supporting MIL-STD-1553 communication, enabling telemetry acquisition and command sending, and providing human-machine interfaces. The project provides a basis for further development of test equipment for space transportation systems.




![On Board
Computer
BC
Primary Bus (A)
Military specification for Digital Time
Secondary Bus (B)
Division Data Bus & Protocol definition: RT … RT BM
◦ Command/Response, Multiplexed;
Radar,
◦ Dual-redundant (Bus A/B), Bidirectional; GNC
Sensors
HK
◦ 1Mbps serial, high bit error reliability (1/106);
Developed due the growing complexity of integrated
avionics systems:
◦ First utilization (1978) in the F-16 Falcon and AH-64A Apache;
Three different type of bus element:
◦ Bus Controller (BC): master device, decide which RT can
communicate on the bus;
◦ Remote Terminal (RT): slave devices such as sensors,
instruments, …
◦ Bus Monitor (BM): slave device, receiving bus traffic and extracting selected
information (i.e. HouseKeeping data);
Used as communication standard on many programs:
◦ Submarines, Tanks [...] Satellites/and Space Systems including
VEGA Launcher, Sentinel-3, and International Space Station (ISS)
Ing. Raul Cafini - Master STS @
Vitrociset S.p.A. 6](https://image.slidesharecdn.com/raulcafini-designanddevelopmentofmil-std-1553basedengineeringmodelslides-master-121014072857-phpapp01/85/Design-and-development-of-MIL-STD-1553-based-engineering-model-6-320.jpg)
















Design and development of MIL-STD-1553 based engineering model
- 1. “Master Course in Space Transportation Systems” Candidate: Ing. Raul Cafini Supervisor: Prof. Ing. Marcello Onofri Vitrociset S.p.A. Tutor: Ing. Giulio Troso Ing. Ciaccini Massimo
- 2. Introduction EGSE/SCOE Engineering Overview Goals & Requirements Hardware & Software Choices Software Architecture ◦ SCOE Core ◦ MIL-STD-1553 Framework Demo Conclusions & Future Works Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 2
- 3. The six-months post-lectures stage activity was conducted c/o Vitrociset S.p.A. (VCS) : ◦ Via Tiburtina 1020, Rome – Italy; ◦ Tutor (Thanks to): Ing. Giulio Troso, Ing. Massimo Ciaccini; Objective: design and development an Engineering Model (EM) for Electrical Ground Support Equipment (EGSE/SCOE) in support of European Space Agency environments. ◦ The approach has to be compliant to ECSS and other standards; ◦ The activity has to be carried out on a both theoretical and practical way; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 3
- 4. A spacecraft and its payload must be able to withstand the extreme stress of launch phase and space environment. To help during the assembly, integration, testing and validation campaigns manufactors build different Ground Support Equipment: o Mechanical-GSE (MGSE), Electrical-GSE (EGSE), … Electrical Ground Support Equipment (EGSE): o Telecommand (TC) sending / Telemetry (TM) acquisition; o Data processing, archiving and retrieval; o Human ⇆ Machine Interaction (HMI); o … Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 4
- 5. Satellite (UUT) Testing is very extensive, calls for automated test equipment that helps to shorten test durations ⇒ SCOE SCOEs are usually provided for each subsystem of a satellite: ◦ Remote control from a Central Check-Out System (CCS) ◦ Standalone mode via a local user interface (HMI). The purpose is to test device units (Units Under Test) to check-out all systems before and after the integration and until launch; ◦ Data-Bus management (MIL-STD-1553, SpaceWire, … ) ◦ Radio Frequency (RF) and Telemetry and Telecommand (TTC) transmitting and receiving equipment; SCOE ◦ Power Supply & Monitoring; ◦ … EGSE Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 5
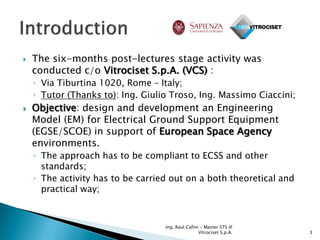
- 6. On Board Computer BC Primary Bus (A) Military specification for Digital Time Secondary Bus (B) Division Data Bus & Protocol definition: RT … RT BM ◦ Command/Response, Multiplexed; Radar, ◦ Dual-redundant (Bus A/B), Bidirectional; GNC Sensors HK ◦ 1Mbps serial, high bit error reliability (1/106); Developed due the growing complexity of integrated avionics systems: ◦ First utilization (1978) in the F-16 Falcon and AH-64A Apache; Three different type of bus element: ◦ Bus Controller (BC): master device, decide which RT can communicate on the bus; ◦ Remote Terminal (RT): slave devices such as sensors, instruments, … ◦ Bus Monitor (BM): slave device, receiving bus traffic and extracting selected information (i.e. HouseKeeping data); Used as communication standard on many programs: ◦ Submarines, Tanks [...] Satellites/and Space Systems including VEGA Launcher, Sentinel-3, and International Space Station (ISS) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 6
- 7. Vettore Europeo di Generazione Avanzata Italy leading project (> 60%) Single-body launcher with three solid rocket stages (P80 + Z23 + Z9) and one liquid upper stage (AVUM) Designed to launch small payloads: o Reference mission 1,500 kg @ 700 km in polar orbit. First launch, from CSG@Kourou early 2012. MIL-STD-1553 is used as avionic bus for allow communication between stages and the On Board Computer (OBC) o VCS works on Vega Control Bench; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 7
- 8. Future ESA space mission, third satellite in the GMES program; Medium-resolution optical/radar altimetry earth/sea observation; Launch date around 2013; Mission characteristics: o Launch mass: ~1250 kg o Launcher: Vega / Soyuz from Kourou o Orbit: Sun-synchronous @ 800 km Applications o Sea and land colour data, surface temperature and topography data MIL-STD-1553 used as main data/control bus between satellite instruments and payloads; o VCS works on satellite SCOEs; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 8
- 9. Define and Develop a Software Architecture: Modeled into layers: ◦ Data Link, Transfer and Application layers; Customizable for Checkout (SCOE) & Timeline definition; o Common Core + Project-Dependant parts; Validate the Engineering Model on a standard-based platform: ◦ i.e. MIL-STD-1553; Following base guidelines from VCS under-development participating ESA projects: ◦ VEGA Launcher; ◦ Sentinel-3 (S3) Satellite; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 9
- 10. Cross-Platform: ◦ Multiple Operative Systems: GNU/Linux (main development) and Windows (partial implemented); Reusable: ◦ Common (general) + Customizable (project-dependant) code; Modular: ◦ Common SCOE Core elements (Logger(s), Data Archiver(s), … ) ◦ Multiple Standard-Dependent Frameworks MIL-STD-1553, SpW, Can-BUS, … Performant: ◦ Possible use in High Rate / Heavy Load data traffic applications; Documented: ◦ Auto-Generated documentation from source code (HTML); Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 10
- 11. Hardware platform based on: ◦ HP Workstation xw6200, Intel Xeon µP (Dual Processor), 2GB RAM; ◦ Aim API-1553 PCI Card; Software: ◦ GNU/Linux O.S. (OpenSUSE 10.3): Performance (customizable O.S. setup to achieve better response and processing performance) Real-Time capability; ◦ Integrated Development Environment (Eclipse): Multi-Language support (C/C++, Java, XML, … ) Plug-in Extension (JDT, CDT, Window Builder, XMLEditor, … ) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 11
- 12. HLCS Command/HK TC/TM LLCS EGSE Engineering 1553HMI PISQ Repository SCOE Core IPC 1553 HMI Util Main Window (Queue, Socket (Thread) SHM) FSM Packetizer Logger Archiver MIL-STD-1553 1553 HMI LLCS Framework OS/HW Driver’s API for Java Virtual Machine MIL-STD-1553 Board (Aim) (JRE) GNU/Linux OS LAN / MIL-STD-1553 Bus Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 12
- 13. This component provide: EGSE Engineering Finite State Machine (FSM): ◦ Allow the creation of a custom FSM to define a series of logical states for application SCOE Core Logger: ◦ Log history of user commands and system FSM Packetizer Logger Archiver responses for traceability and debbuging; Creation of .log text files; Archiver: MIL-STD-1553 Framework ◦ Data traffic archiving on binary file to collect and capture any kind of data for future analisys; Creation of .bin binary data files; Packetizer*: LogFile (.log) Archive (.bin) ◦ Packet/Unpacket data from/to different Protocol Standards (CCSDS, PUS, etc.) * (future extended capabilities) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 13
- 14. This component provide: EGSE Engineering Simulate concurrent bus devices: ◦ BC, RT (up to 31) & BM; SCOE Core Load Bus / Frame Setup ◦ From XSD validated XML file; Frame composition in terms of FSM Packetizer Logger Archiver Major/Minor Frames, Transfers, ... ◦ To/From, Type, Data, … ; MIL-STD-1553 Framework Error Injection / Detection; IRIG-B Timecode: ◦ Inter-Range Instrumentation Group timecode, ◦ Internal / External reference; BusSetup (XML) FrameSetup (XML) Validate BusSchema FrmSchema (XSD) (XSD) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 14
- 15. Now a little demo of how system works… Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 15
- 16. 1553 HMI (Client) TCP/IP 1 2 3 EGSE (Server) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 16
- 17. 1553 HMI (Client) 8 TCP/IP 4 5 7 6 EGSE (Server) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 17
- 18. 1553 HMI (Client) TCP/IP 9 EGSE (Server) Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 18
- 19. Captured traffic (.csv) Command Log File (.log) TM Block Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 19
- 20. Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 20
- 21. Defined a modular and extendable software architecture as defined from requirements; Implemented EGSECoreArchitecture+MIL-STD-1553 Framework (Server-side); Implemented a simple Human-Machine Interface (HMI) to interact with the system (Client-side) Additional stage activities: ◦ Assist VEGA Control Bench group for test activity; ◦ Assist IMBTS Project; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 21
- 22. Continue development from EM to Product Industrialization; o Extends current functionalities; o Deep unit-test and debugging; o Developing new Standard-Based Frameworks (i.e. SpaceWire, CAN-Bus, … ); Use on a pilot project to evaluate the adapting and maintenance efforts; Ing. Raul Cafini - Master STS @ Vitrociset S.p.A. 22