State equations model based on modulo 2 arithmetic and its applciation on recursice convolutional coding
1 like251 views

1) The document discusses state equations that can model digital control systems based on modulo-2 arithmetic and their application to recursive convolutional coding. 2) State equations can be derived from the transfer function of a discrete-time controller and expressed using modulo-2 arithmetic. 3) A recursive convolutional encoder can be modeled by state equations in modulo-2 algebra, where the state at each time step is a function of the previous states and the input bit.























State equations model based on modulo 2 arithmetic and its applciation on recursice convolutional coding
- 1. State equations model based on modulo-2 arithmetic and its application on recursive convolutional coding Ch. N. Tasiopoulos, A.A. Fotopoulos, K.P. Peppas, P.H. Yannakopoulos International Scientific Conference eRA-6
- 2. Introduction According to the theory of control systems, a time- invariant system can be represented by a block diagram with feedback for error correction, such a system can be modeled by state equations. These equations can be derived from the transfer function of the given system, expressed in zeta transformation. 2 International Scientific Conference eRA-6
- 3. Concepts of Digital Theory A discrete time controller can be described from the transfer function: 1 U ( z) b( z ) b0 b1 z b2 z 2 bn z n Gc ( z ) 1 E( z) a( z ) a0 a1 z a2 z 2 an z n 3 International Scientific Conference eRA-6
- 4. Concepts of Digital Theory Direct hardware realization model Fig. 10.2.1, pg. 284 “Control Systems”, P.N. Paraskeuopoulos 4 International Scientific Conference eRA-6
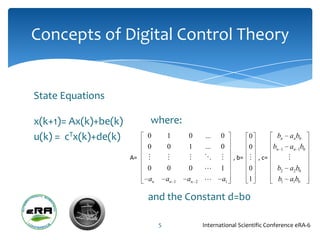
- 5. Concepts of Digital Control Theory State Equations x(k+1)= Ax(k)+be(k) where: u(k) = cTx(k)+de(k) 0 1 0 ... 0 0 bn anb0 0 0 1 ... 0 0 bn 1 an 1b0 A= , b= , c= 0 0 0 1 0 b2 a2 b0 an an 1 an 2 a1 1 b1 a1b0 and the Constant d=b0 5 International Scientific Conference eRA-6
- 6. Concepts of Information & Control Theory Group definition A group (G,*) is a pair consisting of a set G and an operation * on that set , that is a function from the Cartesian product GxG to G , with the result of operating on a and b denoted by a*b , which satisfies 1. Associativity : a*(b*c)= (a*b)*c for all a, b, c G 2. Existence of identity: There exists e G such that e*a=a and a*e=a for all a G 1 3.Existence of inverses: For each a G there exists a G such that a * a 1 =e and a 1 * a =e 6 International Scientific Conference eRA-6
- 7. Concepts of Information & Control Theory Cyclic Groups definition For each positive integer p, there is a group called the cyclic group of order p, with set of elements Zp {0,1,,( p 1)} and operation defined by i j i j If i j p , where (+ )denotes the usual operation of addition of integers, and i j i j p If i j p ,where (-) denotes the usual operation of subtraction of integers. The operation in the cyclic group is addition modulo p. We shall use the sign + instead of to denote this operation in what follows and refer to “the cyclic Group ( Z p , ) ” , or simply the cyclic group Z p 7 International Scientific Conference eRA-6
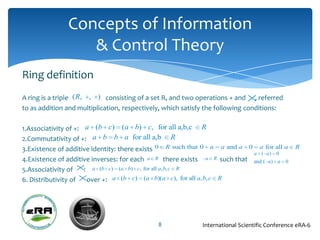
- 8. Concepts of Information & Control Theory Ring definition A ring is a triple ( R, , ) consisting of a set R, and two operations + and , referred to as addition and multiplication, respectively, which satisfy the following conditions: 1.Associativity of +: a (b c) (a b) c, for all a,b,c R 2.Commutativity of +: a b b a for all a,b R 3.Existence of additive identity: there exists 0 R such that 0 a a and a 0 a for all a R a ( a) 0 4.Existence of additive inverses: for each a R there exists a R such that and ( a) a 0 5.Associativity of : a (b c) (a b) c, for all a, b, c R 6. Distributivity of over +: a (b c) (a b)(a c), for all a, b, c R 8 International Scientific Conference eRA-6
- 9. Concepts of Information & Control Theory Cyclic Groups definition For every positive integer p, there is a ring (Z p , , ) , called the cyclic ring of order p, with set of elements Zp {0,1,,( p 1)} and operations + denoting addition modulo p, and denoting multiplication modulo p 9 International Scientific Conference eRA-6
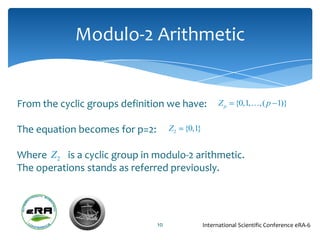
- 10. Modulo-2 Arithmetic From the cyclic groups definition we have: Zp {0,1,,( p 1)} The equation becomes for p=2: Z2 {0,1} Where Z 2 is a cyclic group in modulo-2 arithmetic. The operations stands as referred previously. 10 International Scientific Conference eRA-6
- 11. State equations & modulo-2 Assume the following transfer function: 1 U ( z) b( z ) b0 b1 z b2 z 2 bn z n Gc ( z ) 1 E( z) a( z ) a0 a1 z a2 z 2 an z n with b0b1b2bn GF (2) and a0 a1a2an GF (2) The differential equation will be: 1 2 U ( z)(a0 a1z a2 z ... an z n ) e( z)(b0 b1z 1 b2 z 2 ... bn z n ) 11 International Scientific Conference eRA-6
- 12. State equations & modulo-2 1 2 n 1 2 n u( z)a0 u( z)a1z u( z)a2 z ... u(z)an z e(z )b0 e(z )b1z e(z )b2 z ... e(z )bn z Applying inverse Z transform with k 0,1, 2,...m GF (10) we have: u(k )a0 u(k 1)a1 u(k 2)a2 ... u(k n)an e(k )b0 e(k 1)b1 e(k 2)b2 ... e(k n)bn 12 International Scientific Conference eRA-6
- 13. State equations & modulo-2 The above differential equation has the following direct hardware realization: Fig. 10.2.1, pg. 284 “Control Systems”, P.N. Paraskeuopoulos 13 International Scientific Conference eRA-6
- 14. State equations & modulo-2 Based on the above figure we derive the following recursive signal equations: xn ( k 1) e( n ) a1 xn ( k ) a2 xn 1 (k ) ... an x1 (k ) xn ( k ) xn 1 (k 1) xn 1 (k ) xn 2 (k 1) x2 ( k ) x1 ( k 1) x1 ( k ) 14 International Scientific Conference eRA-6
- 15. State equations & modulo-2 0 1 0 ... 0 0 bn anb0 x( k 1) Ax ( k ) be( k ) 0 0 1 ... 0 0 bn 1 an 1b0 A= , b= , c= u (k ) cT x( k ) de( k ) 0 0 0 1 0 b2 a2 b0 an an 1 an 2 a1 1 b1 a1b0 where: , b, c, d GF (2) 15 International Scientific Conference eRA-6
- 16. Implementation in recursive convolutional coding 16 International Scientific Conference eRA-6
- 17. Description of Recursive Convolutional Encoder 17 International Scientific Conference eRA-6
- 18. Description of Recursive Convolutional Encoder o The convolutionally encoding data, requires the use of n memory registers, each holding 1 input bit, unless otherwise specified. All memory registers start with a value of zero (0). o The encoder has n modulo-2 adders and n generator polynomials o Using the generator polynomials and the existing values in the remaining registers, the encoder outputs n bits. o I(n) consists the Input data and C1,C2,Cn the output data 18 International Scientific Conference eRA-6
- 19. Recursive Convolutional Encoder Based on the figure we derive the following recursive signal equations: X1 n = X1 n X1 n-1 = X 2 n X 2 n-1 = X 3 n = X1 n-2 X 3 n-1 =X 4 n =X1 n-3 X n-1 n-1 =X n n Xn n-1 19 International Scientific Conference eRA-6
- 20. Algebraic Form of State Equations of Recursive Convolutional Encoder in modulo-2 From the recursive signal equations we have the algebraic form of state equations: m xm (n 1) xi (n) I (n) where m is the number of registers i 1 m cj xi (n) dI (n) where 1 j n i 1 n, m, i, j GF (10) with: X , I , c, d GF (2) 20 International Scientific Conference eRA-6
- 21. Vector Form of State Equations of Recursive Convolutional Encoder in modulo-2 From the recursive signal equations we have the vector form of state equations: 0 1 0 ... 0 0 bn anb0 X (n 1) AX (n) bI (n) 0 0 1 ... 0 0 bn 1 an 1b0 A= , b= , c= Cj cT X (n) dI (n) 0 0 0 1 0 b2 a2 b0 an an 1 an 2 a1 1 b1 a1b0 n, j, e GF (10) with: A, b, c, d , I , a, b GF (2) 21 International Scientific Conference eRA-6
- 22. Numerical Example Suppose we have the following encoder: m=3 22 International Scientific Conference eRA-6
- 23. Numerical Example By applying the recursive signal formula for this particular model we have: X1(n)=X1(n) X1(n-1)=X2(n) X2(n-1)=X3(n) X3(n-1)=X1(n)-I(n)-X3(n)-X2(n) 23 International Scientific Conference eRA-6
- 24. Numerical Example Using these equations we can derive the state equations: x1( n 1) 0 1 0 x1( n ) 0 x2( n 2) = 0 0 1 x2( n ) + 0 I(n) x3( n 3) 1 1 1 x3( n ) 1 24 International Scientific Conference eRA-6
- 25. Numerical Example Now we will study the controllability & observability of the given system: The determinant of s is given by the s B AB A2 B following formula: 0 0 0 1 0 1 0 1 1 3 3 AB 1 s 0 1 1 det( s) 0 0 ( 1) det( s) 1 1 1 1 1 1 1 1 0 1 det(s) 1 0 1 1 0 2 AB 1 0 The system is controllable 25 International Scientific Conference eRA-6
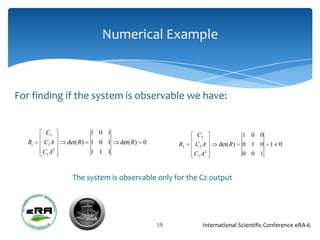
- 26. Numerical Example For finding if the system is observable we have: C1 1 0 1 C2 1 0 0 R1 C1 A det( R) 1 0 1 det( R) 0 R2 C2 A det( R ) 0 1 0 1 0 C1 A2 1 1 1 C2 A 2 0 0 1 The system is observable only for the C2 output 26 International Scientific Conference eRA-6
- 27. Thank you for your attention Evariste Galois 1811-1832 27 International Scientific Conference eRA-6