

















![I/O Addressing
27
Separate I/O Address Space Memory-Mapped I/O
Supported by special instruction The general purpose instruction set
can be used to access I/O Ports.
Supported by a hardware protection
mechanism.
Protection is provided using
segmentation or paging.
There is separate I/O Space I/O ports appears in the address space
of Physical Memory
Only IN and OUT instruction can access
such devices
e.g: IN AX, 45H
Any Memory related instruction will be
able to access this I/O device
e.g.: MOV BX, [3500H]](https://image.slidesharecdn.com/unit2ppt-250318054535-3e5616a9/85/Micrprocessor-unit-2-ppt-This-unit-synchronizes-all-the-microprocessor-operations-with-the-clock-and-generates-the-control-signal-necessary-for-communication-between-the-microprocessor-27-320.jpg)
































Micrprocessor unit 2 ppt This unit synchronizes all the microprocessor operations with the clock and generates the control signal necessary for communication between the microprocessor ...
- 1. Unit 1: Introduction to 80386 Unit 2: Bus Cycles and System Architecture Microprocessor 1
- 2. 2
- 4. Initialization 4 • After a signal on the RESET pin, certain registers of 80386 are set to predefined values. • These values are adequate to enable execution of a bootstrap program.
- 5. Processor State after RESET • Contents of EAX depends on results power-up self test • Self-test may be requested externally by assertion of BUSY# at the end of RESET (EAX=0 if the 80386 passed the test, else 80386 unit is faulty) • If self-test is not requested , EAX is undefined • DX holds a component identifier and revision number (DH=3, indicates 80386, DL=unique identifier of the revision level) 5
- 6. Introduction to Processor State After Reset 6 • The 386 DX Microprocessorr has an input, called RESET# pin, which invokes reset initialization. • After asserting the signal on the RESET# Pin, some registers of the 386 DX Microprocessor are set to known states. • These known states,such as the contents of the EIP register,are sufficient to allow software to begin execution. • Software then can build the data structure in memory such as the GDT and LDT tables, which are used by system and application software. • The 386 DX Microprocesssor has several processing modes.
- 7. Processor State After Reset with RESET Signal 7 • Hardware assert the RESET# signal at powerup. • Hardware may assert this signal at other times.for example,a button may be provided for manually invoking reset initialization. • Reset also may be the response of Hardware to receiving a halt or shutdown indication.
- 8. Self Test at Power-Up 8 • A self- Test may be requested at power up, a self test is requested by asserting the signal on the BUSY# pin during the falling edge of the RESET# Signal. • RESET initialization take 350 to 450 clock periods • If the self test is selected , it takes about 220 clock periods
- 9. Contents of EAX Regiter. 9 • The contents of EAX depend upon the results of the power-up self test. • The EAX register is clear (holds zero)if the 386 DX microprocessor passed the test. • A non-zero value in the EAX register after self-test indicates the processor is faulty. • If the self-test is not requested, the contents of the EAXregister after reset initialization are undefined(possibly non-zero).
- 10. Contents of DX Register. 10 • The DX register holds a component identifier and revision number after reset initialization, as shown in Figure. • The DH register contains the value 3, which indicates a 386 DXmicroprocessor. The DL register contains a unique identifier ofthe revision level.
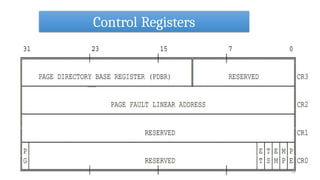
- 11. The State of CR0 Register • Control Register 0 (CR0) contains, The state of the CRO register following power- up is shown in Figure. These states put the processor into real-address mode with paging disabled. 11
- 12. State of flags and other registers 12 • The state of the EBX, ECX, ESI, EDI, EBP, ESP, GDTR, LDTR, TR and debug registers is undefined following power-up.Software should not depend on any undefined states. • The state of the flags and other registers following power-up isshown in Table
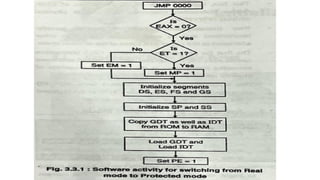
- 14. Software Initialization for real Address Mode(Introduction) • After reset initialization, software sets up data structures needed for the processor to perform basic system functions, such as handling interrupts. • If the processor remains in real-address mode, software sets up data structures in the form used by the 8086processor • .If the processor is going to operate in protected mode software sets up data structures in the form used by the80286 and 386 DX microprocessors, then switches modes.
- 15. Software Initialization for real Address Mode(STACK) • No Instruction that use the stack can be used until the stack- segment register(SS) has been loaded. • SS must point to an area in RAM
- 16. Interrupt Table • The initial state of the 80386 leaves interrupts disabled; however, the processor will still attempt to access the interrupt table if an exception or non-maskable interrupt (NMI) occurs. Initialization software should take one of the following actions: • Change the limit value in the IDTR to zero. This will cause a shutdown if an exception or non- maskable interrupt occurs. • Put pointers to valid interrupt handlers in all positions of the interrupt table that might be used by exceptions or interrupts. • Change the IDTR to point to a valid interrupt table.
- 17. Address For First Instruction • The CS register has two parts: the visible segment selector part and the hidden base address part. • In real-address mode, the base address is normally formed by shifting the 16-bit segment selector value 4 bits to the left to produce a 20-bit base address. • However, during a hardware reset, the segment selector in the CS register is loaded with F000H and 20 bit base address is FOOOOH and the high 12 bits of addresses issued for the code segment are set hence the 32 bit base address is FFFF0000H. The starting address is thus formed by adding the base address to the value in the EIP register (FFFOH) • (FFFF0000 + FFFOH = FFFFFFFOH). • The first instruction that is fetched and executed following a hardware reset is located at physical address FFFFFFFOH
- 18. First Instruction • After RESET, address lines A{31-20} are automatically asserted for instruction fetches. • This fact, together with the initial values of CS:IP, causes instruction execution to begin at physical address FFFFFFFOH Near (intra segment) forms of control transfer instructions maybe used to pass control to other addresses in the upper 64Kbytes of the address space. • The first far (intersegment) JMP or CALL instruction causes A{31-20} to drop low, and the 80386 continues executing instructions in the lower one megabyte of physical memory. • This automatic assertion of address lines A{31-20} allows systems designers to use a ROM at the high end of the address space to initialize the system.
- 22. BUS CYCLE DEFINATION M/IO# D/C# W/R# Type of Bus cycle 0 0 0 Interrupt Acknowledge 0 0 1 Bus Idle 0 1 0 I/O data read 0 1 1 I/O data write 1 0 0 Halt/Shutdown 1 1 0 Memory Data Read 1 1 1 Memory data wite
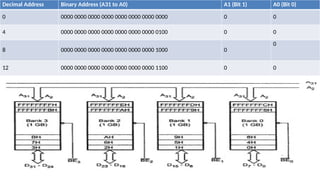
- 23. Decimal Address Binary Address (A31 to A0) A1 (Bit 1) A0 (Bit 0) 0 0000 0000 0000 0000 0000 0000 0000 0000 0 0 4 0000 0000 0000 0000 0000 0000 0000 0100 0 0 8 0000 0000 0000 0000 0000 0000 0000 1000 0 0 12 0000 0000 0000 0000 0000 0000 0000 1100 0 0
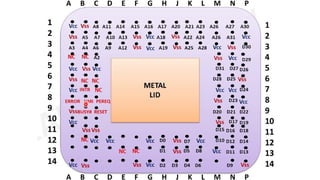
- 25. Pin Description Table (Cont…) 25
- 26. I/O Addressing 26 The 80386 allows input/output to be performed in either of two ways: a. By means of a separate I/O address space (using specific I/O instructions) b. By means of memory-mapped I/O (using generalpurpose operand manipulation instructions ) Some system designer may prefer to use the I/O Facilities built into the processor, while others may prefer the simplicity of a single physical address space.
- 27. I/O Addressing 27 Separate I/O Address Space Memory-Mapped I/O Supported by special instruction The general purpose instruction set can be used to access I/O Ports. Supported by a hardware protection mechanism. Protection is provided using segmentation or paging. There is separate I/O Space I/O ports appears in the address space of Physical Memory Only IN and OUT instruction can access such devices e.g: IN AX, 45H Any Memory related instruction will be able to access this I/O device e.g.: MOV BX, [3500H]
- 28. Separate I/O address space (An Isolated I/O) 28 I/O devices treated separately from memory. • Hardware and software architecture of 8088/8086 support separate memory I/O address space. Can be accessed as either byte-wide or word-wide. Can be treated as either independent byte- wide I/O ports or word-wide I/O ports. Page 0: • Certain I/O instructions can only perform operations to ports in this part of the address range. • Other I/O instructions can input/output data for ports anywhere in the address space.
- 29. Separate I/O address space (An Isolated I/O) 29 Advantages: - 1 MByte memory address space is available for use with memory. Special instructions have been provided in the instruction set of 8088/8086 to perform isolated I/O input and output operations. These instructions have been tailored to maximize I/O performance. Disadvantages: - All input and output data transfers must take place between AL or AX register and the I/O port
- 30. Memory-mapped I/O I/O devices is placed in memory address space of the microcomputer. • The memory address space is assigned to I/O devices. • MPU looks at the I/O port as though it is a storage location in memory. • Make use of instructions that affect data in memory rather than special input/output instructions. 30
- 31. Memory-mapped I/O Advantages: Many more instructions and addressing modes are available to perform I/O operations. I/O transfers can now take place between I/O port and internal registers other than just AL/AX. Disadvantages: Memory instructions tend to execute slower than those specifically designed for isolated I/O. Part of the memory address space is lost 31
- 32. I/O Instructions 32 There are two classes of I/O instruction: 1. Those that transfer a single item (byte, word, or doubleword) located in a register. 2. Those that transfer strings of items (strings of bytes, words, or doublewords) located in memory. These are known as "string I/O instructions" or "block I/O instructions".
- 33. Register I/O Instructions • The I/O instructions IN and OUT are provided to move data between I/O ports and the EAX (32-bit I/O), the AX (I6-bit I/O), or AL (8-bit I/O) general registers. • IN and addresses OUT instructions I/O ports either directly, with the address of one of up to 256 port 33
- 34. Block I/O Instructions 34 • The block (or string) I/O instructions INS and OUTS move blocks of data between I/O ports and memory space. • Block I/O instructions use the DX register to specify the address of a port in the I/O address space. • Block I/O instructions use either SI or DI to designate the source or destination memory address. • For each transfer, SI or DI are automatically either incremented or decremented as specified by the direction bit in the flags register.
- 35. Read and Write Cycles 35 • Data transfers occur as a result of bus cycles, classified as read or write cycles. • Two choices of address timing are dynamically selectable: non-pipelined, or pipelined. • After a bus idle state, the processor always uses non-pipelined address timing. • However, the NA# (Next Address) input may be asserted to select pipelined address timing for the next bus cycle. • When pipelining is selected and the Intel386 DX has a bus request pending internally, the address and definition of the next cycle is made available even before the current bus cycle is acknowledged by READY#. • Terminating a read cycle or write cycle, like any bus cycle, requires acknowledging the cycle by asserting the READY# input. • Until acknowledged, the processor inserts wait states
- 36. Comparision B/W Non pipelined and Pipelined Bus Cycle Feature Non-Pipelined Bus Cycle Pipelined Bus Cycle Address Strobe (ADS#) A new address is issued only after the previous cycle completes. New addresses are issued before the previous cycle completes. Bus Utilization Inefficient (idle gaps between cycles). Efficient (continuous data transfer, minimal idle time). Cycle Overlapping No overlapping of address and data phases. Overlapping of address and data phases to improve performance. NA# (Next Address Signal) Not used. Used to indicate that the bus is ready for the next address. Latency Higher, as each read/write must wait for the previous one to finish. Lower, as multiple transactions happen simultaneously. Performance Slower, as the bus is idle during certain phases. Faster, as the bus is always occupied with some operation. Wait States More likely to occur, as each cycle must fully complete before the next starts. Fewer wait states, since the processor can start a new transaction while another is completing. Complexity Simpler to implement. More complex due to overlapping cycles and the need for NA# signal handling. Use Case Used in simpler, slower systems where performance is not critical. Used in high-performance systems like 80386 and beyond to maximize efficiency.
- 37. Non-pipelined read & write cycles 37
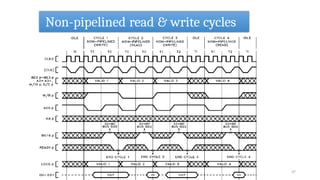
- 41. Non-pipelined read & write cycles 41 • At the end of the second bus state within the bus cycle, READY# is sampled • If asserted the bus cycle terminates • Else the cycle continues another bus state (a wait state) and READY# is sampled again at the end of that state. • This continues indefinitely until the cycle is acknowledged by READY# asserted.
- 43. Systems Architecture 43 Many of the architectural features of the 80386 are used only by systems programmers.This chapter presents an overview of these aspects of the architecture. • Memory Management • Protection • Multitasking • Input/Output • Exceptions and Interrupts • Initialization. • Coprocessing and Multiprocessing • Debugging These Features are implemented by registers and instructions
- 44. Systems Registers 44 • EFLAGS • Memory Management Registers • Control Registers • Debug Registers • Test Registers
- 45. Systems Registers 45 EFLAGS • Memory Management Registers • Control Registers • Debug Registers • Test Registers
- 46. EFLAGS System Flags of EFLAG REGISTER 46
- 47. Systems Flags • The systems flags of the EFLAGS register control I/O, maskable interrupts, debugging, task switching, and enabling of virtual 8086execution in a protected, multitasking environment.. • IF (Interrupt-Enable Flag, bit 9) Setting IF allows the CPU to recognize external (mask able) interrupt requests. Clearing IF disables these interrupts. IF has no effect on either exceptions or non-maskable external interrupts.. • NT (Nested Task, bit 14) The processor uses the nested task flag to control chaining of interrupted and called tasks. NT influences the operation of the IRET instruction.
- 48. Systems Flags • .RF (Resume Flag, bit 16) The RF flag temporarily disables debug exceptions so that an instruction can be restarted after a debug exception without immediately causing another debug exception.· • TF (Trap Flag, bit 8) Setting TF puts the processor into single-step mode for debugging. In this mode, the CPU automatically generates an exception after each instruction, allowing a program to be inspected as it executes each instruction. Single- stepping is just one of several debugging features of the 80386.. • VM (Virtual 8086 Mode, bit 17) When set, the VM flag indicates that the task is executing an 8086 program. Refer to Chapter 14 for a detailed discussion of how the 80386 executes 8086 tasks in a protected, multitasking environment.
- 49. Systems Registers 49 • EFLAGS Memory Management Registers • Control Registers • Debug Registers • Test Registers
- 50. Selector and Descriptor The selector, located in the segment register, selects one of descriptors from one of two tables of descriptors. The descriptor (8 bytes), describes the location, length, and access rights of the segment of memory. There are 2 descriptor tables: 1. Global descriptors: "system descriptor" contain segment definitions that apply to all programs 2. Local descriptors: "application descriptor" usually unique to an application. • Each descriptor table contains 8192 descriptors. So total descriptors is 16,384, and the application could have access to 4G X 16,384 = 64T bytes. • In protected mode, this segment number can address any memory location in the system for the code segment.
- 51. Memory-Management Registers 51 • Four registers of the 80386 locate the data structures that control segmented memory management: GDTR Global Descriptor Table Register LDTR Local Descriptor Table Register • These registers point to the segment descriptor tables GDT and LDT. • IDTR Interrupt Descriptor Table Register This register points to a table of entry points for interrupt handlers (the IDT). • TR Task Register This register points to the information needed by the processor to define the current task.
- 52. Systems Registers 52 • EFLAGS • Memory Management Registers Control Registers • Debug Registers • Test Registers
- 54. Systems Registers 54 • EFLAGS • Memory Management Registers • Control Registers Debug Registers • Test Registers
- 55. Debug Registers • Sixregisters: to control debug features • Accessed by variants of the MOV instruction • debug registers are privileged resources Registers are: Debug Address Registers (DRO- DR3) Debug Status Register (DR6) Debug Control Register (DR7) 55
- 56. Introduction to Debug Registers 56 •Introduces six debug registers: DR0 - DR3, DR6, DR7. •These are accessed using MOV instructions, but only at privilege level 0. •Attempting access at any other level results in a general protection exception. •Purpose: Debug registers help monitor instruction execution, memory access, and control flow through hardware breakpoints.
- 57. Debug Address Registers(DR0-DR3) 57 • These registers store linear addresses for up to four breakpoints. • Work regardless of paging; if paging is enabled, the CPU translates them to physical addresses. • Used to set watchpoints to monitor: • Instruction execution • Memory reads or writes • The type of monitoring is controlled by DR7.
- 58. Debug Control Registers(DR7) (Configuring Breakpoints) 58 • . •Purpose: Defines the behavior of breakpoints. •Breakpoint conditions (R/W0 - R/W3): •00: Break on instruction execution. •01: Break on data writes. •11: Break on data reads and writes (but not instruction fetches). •Length (LEN0 - LEN3): Specifies the size of data to monitor. •00: 1 byte •01: 2 bytes •11: 4 bytes •Task-Switch Behavior: •Local enable (L0-L3): Reset when tasks switch. •Global enable (G0-G3): Remain active across tasks. •LE/GE Bits: Ensure precise breakpoint detection by slowing execution.
- 59. Debug Status Register(DR6) (Identifying Debug Event) 59 • Used to determine which debug condition triggered an exception. • Flags: • B0 - B3: Set if corresponding DR0-DR3 condition occurs. • BT bit: Set if trap occurs during task switch due to T-bit in TSS. • BS bit: Set if exception caused by single-step execution (TF bit in EFLAGS). • BD bit: Set if an attempt is made to access debug registers while ICE-386 is using them. • Handling DR6: • CPU does not automatically clear DR6. • Debug handler must manually clear DR6 before returning to avoid stale debug flags. • .
- 60. Systems Registers 60 • EFLAGS • Memory Management Registers • Control Registers • Debug Registers Test Registers
- 61. Test Registers • Two test registers are provided for the purpose of testing. • TR6 is the test command register, and TR7 is the test data register. • The test registers are privileged resources; in protected mode, the MOV instructions that access them can only be executed at privilege level 0 61
- 62. The Test Command Register (TR6) • C: Command bit, two commands: ‘0’- write entries into the TLB and ‘1’ perform TLB lookups • Linear Address(Tag Field serves as upper 20-bits of linear address to be used for TLB Reference) on a TLB write command, a TLB entry is allocated to this linear address and the rest of that TLB entry is set as per the values of TR7 & TR6 on a TLB lookup command, the TLB is interrogated as per this value and if one and only one TLB entry matches, the rest of the fields of TR6 & TR7 are set from the matching TLB entry. • V: The Valid bit for this TLB entry. The TLB uses the valid bit to identify entries that contain valid data. Entries of the TLB that have not been assigned values have zero in the valid bit. All valid bits can be cleared by writing to CR3. • D, D#: The dirty bit for/from the TLB entry • U, U#: The U/S bit for/from the TLB entry • W, W#: The R/W bit for/from the TLB entry Meaning of D, U, and W Bit Pairs 62
- 63. The Test Data Register (TR7) 63 Holds data read from or data to be written to the TLB • Physical Address: This is the data field of the TLB. On a write to the TLB, the TLB entry allocated to the linear address in TR6 is set to this value. On a TLB lookup, if HT is set, the data field (physical address) from the TLB is read out to this field. If HT is not set, this field is undefined.(This field contains either the physical address to be written into TLB or the result of the valid TLB hit.) • HT: For a TLB lookup, the HT bit indicates whether the lookup was a hit (HT <- 1) or a miss (HT <- 0). For a TLB write, HT must be set to 1. • REP: This is replacement pointer. This field indicates which set of the TLB four way set associative catch to write to.
- 64. Test Operations 64 To write a TLB entry • Move a doubleword to TR7 that contains the desired physical address, HT, and REP values. HT must contain 1. REP must point to the associative block in which to place the entry • Move a doubleword to TR6 that contains the appropriate linear address, and values for V, D, U, and W. Be sure C=0 for "write" command. To look up (read) a TLB entry • Move a doubleword to TR6 that contains the appropriate linear address and attributes. Be sure C = 1 for "lookup" command • Store TR 7. If the HT bit in TR 7 indicates a hit, then the other values reveal the TLB contents. If HT indicates a miss, then the other values in TR 7 are indeterminate
- 65. Systems Instructions 65 1. Verification of pointer parameters: • ARPL ── Adjust RPL • LAR ── Load Access Rights • LSL ── Load Segment Limit • VERR ── Verify for Reading • VERW ── Verify for Writing 2. Addressing descriptor tables: • LLDT ── Load LDT Register • SLDT ── Store LDT Register • LGDT ── Load GDT Register • SGDT ── Store GDT Register 3. Multitasking: • LTR ── Load Task Register • STR ── Store Task Register 4. Coprocessing and Multiprocessing : • CLTS ── Clear Task-Switched Flag • ESC ── Escape instructions • WAIT ── Wait until Coprocessor not Busy • LOCK ── Assert Bus-Lock Signal
- 66. Systems Instructions 66 5. Input and Output : • IN ── Input • OUT ── Output INS ── Input String • OUTS ── Output String 6. Interrupt control : • CLI ── Clear Interrupt-Enable Flag • STI ── Set Interrupt-Enable Flag • LIDT ── Load IDT Register • SIDT ── Store IDT Register 9. System Control: 7. Debugging : • MOV ── Move to and from debug registers 8. TLB testing : • MOV ── Move to and from test registers • SMSW ── Set MSW • LMSW ── Load MSW • HLT ── Halt Processor • MOV ── Move to and from control registers
- 67. 67
- 68. 68